Навчальний посібник Автоматизація технологічних процесів і систем автоматичного керування (частина 3)
Навчальний посібник Автоматизація технологічних процесів і систем автоматичного керування (частина 3)
3.3.3. Автоматизація установок для змішування кормів.
Використанням дозаторів та змішувачів різних типів розглянемо на прикладі агрегата приготування кормів АПК-10А та запарника-змішувача СКО-Ф.
Агрегат АПК-10А (рис. 3.12) використовують для одночасного подрібнення і змішування грубих кормів (сіна, соломи, тощо), силосу, сінажу, коренебульбоплодів, концентрованих кормів і розчинів різних добавок з метою приготування повнораціонних кормових сумішей у кормоцехах ферм ВРХ і свиноферм.
На агрегаті можна також мити коренебульбоплоди без їх подрібнення.< >< >
На рамі агрегату встановлена шнекова мийка і подрібнювач-змішувач. Шнекова мийка складається з приймального бункера, шнека, з кожухом, зрошувальної системи і привода. Подача шнека регулюється ступінчасто (у 12 ступенів) заміною вінців зірочок на його приводі.
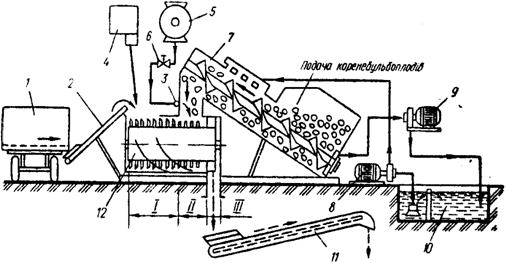
Рисунок 3.12. Технологічна схема агрегату АПК-10А: 1- кормороздавач-живильник кормів КТУ-10А; 2 - приймальний транспортер; 3 - розпилювач розчинів мікродобавок; 4 - дозатор концентрованих кормів; 5 – змішувач мікродобавок; 6 - тарувальний кран; 7 - шнекова мийка-дозатор; 8 - насос К20/30У2; 9 - насос СД50/10б; 10 - відстійник; 11 - транспортер готової суміші; 12 - подрібнювач змішувач; І - зона ножів; ІІ - зона молотків; ІІІ - зона кидалки.
На барабані подрібнювача-змішувача розміщені ножі для подрібнення стеблистих кормів, молотки для подрібнення коренебульбоплодів і кидалка. В корпусі подрібнювача вмонтовані дві деки, на яких закріплюють або протирізальні чавунні колодки, або по 12 протирізальних ножів. Ступінь подрібнення грубих кормів регулюють зміною кількості встановлених на барабані ножів, а також зміною зазору між кінцями ножів і рухомою декою. Грубі і соковиті корми (солома, сінаж, силос) через бункери-дозатори подаються на приймальний транспортер агрегату, який направляє їх у зону ножів подрібнювача. Попередньо подрібнені ножами корми направляються в зону роботи молотків, якими додатково розчіплюються вздовж волокон і змішуються з коренебульбоплодами.
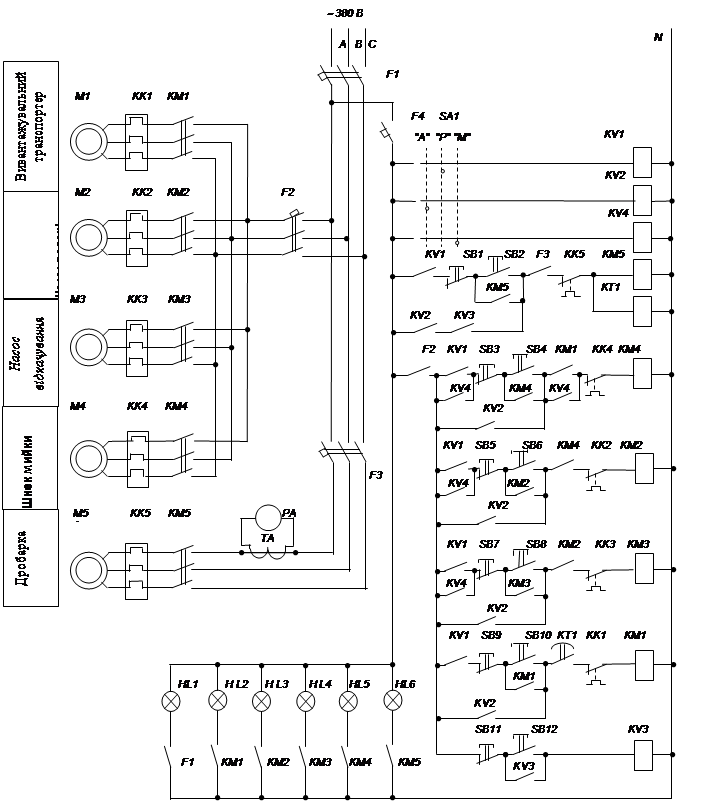
Рисунок 3.13. Принципова електрична схема агрегату приготування кормів АПК-10А.
Коренебульбоплоди порціями біля 500 кг завантажуються у приймальний бункер мийки-дозатора і шнеком подається у зону молотків подрібнювача-змішувача. Проходячи через кожух шнека, коренеплоди відмиваються струменями води.
Концентровані корми в подрібнювач-змішувач подаються з дозатора кормоцеху через приймальну воронку.
Апарати керування і захисту електродвигунів агрегату змонтовані в ящику керування. Живлення на силові кола подається через автоматичні вимикачі F1, F2, F3 (рис. 3.13), на кола керування – через вимикач F4. Перемикачем SA1 встановлюється один з режимів роботи агрегату: "Автоматичний", "Ручний", або "Миття".
Для готування кормосумішей в автоматичному режимі перемикач SA1 встановлюють у положення «Авт.». При цьому спрацьовує реле KV2. Після натискання кнопки SB12, що замикає ланцюг котушки реле пуску KV3, відбувається послідовний запуск електродвигунів дробарки М5, вивантажувального транспортера M1, шнека М4, насоса подачі М2 і насоси відкачки води М3. Електродвигун вивантажувального транспортера запускається з запізнюванням, необхідним для розгону дробарки. Витримка часу створюється реле часу КТ.
У ручному режимі роботи агрегату для готування кормосумішей перемикач SA1 ставлять у положення «Ручн.» Вмикання і зупинка механізмів агрегату здійснюється кнопками SB1—SB10 з дотриманням необхідної послідовності пуску електроприводів відповідно до технологічної схеми.
Для забезпечення режиму мийки коренеплодів перемикач SA1 ставлять у положення «Миття». Пуск механізмів агрегату виробляється кнопками в наступній послідовності: привод шнекової мийки М4, привод насоса подачі води М2, привод насоса відкачки води МЗ. Зупинка механізмів здійснюється натисканням кнопок «Стоп» у зворотній послідовності.
Контроль ступеня завантаження електродвигуна дробарки здійснюється по перевантажувальному амперметрі РА.
Уніфіковані одновальні змішувачі СКО-Ф-3 і СКО-Ф-6 призначені для змішування кормів вологістю 60-80% із запарюванням і без запарювання на свинофермах і комплексах.
Комплект СКО-Ф-3 складається зі змішувача, завантажувального транспортера ТС-40,ОМ-О4, вивантажувального транспортера ТС-40,ОМ-О1, сходів і шафи керування.
СКФ-Ф-6 виготовляється у двох виконаннях: СКО-Ф-6-1 для використання у комплекті обладнання кормоцеху; СКО-Ф-6-ІІ для застосування як самостійна машина. В останньому випадку змішувач комплектується завантажувальним і вивантажувальним транспортерами типу ТС-40,ОМ-О1, драбиною, шафою керування і перехідником.
Змішувач типу СКО-Ф складається з корпуса, одновальної мішалки, завантажувального люка, вивантажувального шнека, вивантажувальної горловини з заслінкою, зрошувачів, системи паророзподілу, оглядового люка, кришки корпуса і електроприводів. Зовнішній вигляд змішувача зображений на рисунку 3.14, а на рисунку 3.15 - кінематична та функціональна схеми.
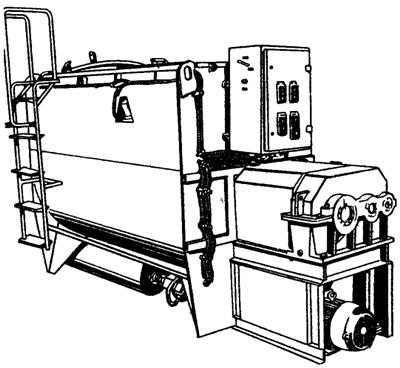
Рисунок 3.14. Зовнішній вигляд змішувача СКО-Ф.
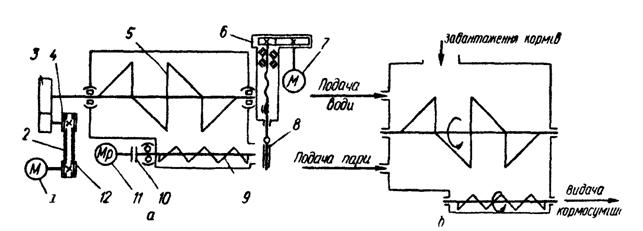
Рисунок 3.15. Змішувач кормів СКО-Ф: А - кінематична схема; б - функціональна схема; 1 – електродвигун мішалки; 2 – пасова передача; 3 - редуктор; 4 - шків; 5 - Мішалка; 6 - Привод Засувки; 7 - електродвигун приводу засувки; 8 - засувка; 9 - шнек вивантажувальний; 10 - муфта; 11 - мотор-редуктор приводу шнека вивантажувального; 12 – шків.
Технологія приготування без запарювання така. Вмикають привод мішалки і завантажують резервуар змішувача компонентами корму. При необхідності суміш зволожують. Рідкими кормовими дріжджами, розчином патоки та іншими добавками корми збагачують після заповнення резервуара основним продуктом. Через 10 -18 хв готову суміш вивантажують.
При приготуванні кормів із запарюванням у змішувач заливають розрахункову кількість води. Потім подають пару, якою нагрівають воду до 90 °С. Вмикають електродвигун мішалки і завантажують корми, призначені для запарювання. Після цього перекривають подачу пари, а корми витримують гарячими 1-3 години. Готову суміш вивантажують у транспортні засоби.
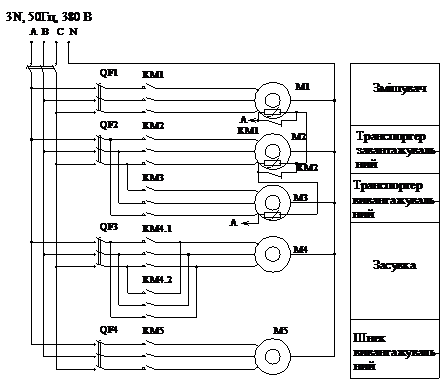
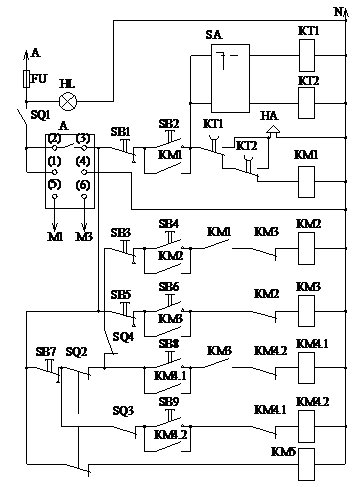
Рисунок 3.16. Принципова електрична схема змішувача кормів СКО-Ф.
Схема керування працює так. При вімкнених автоматичних вимикачах QF1-QF4 вмикають пакетний вимикач QS після чого загоряється сигнальна лампа НL. Якщо кришка оглядового люка закрита (замкнений SQ1) замикається вихідний контакт пристрою температурного захисту ВК. Для запуску двигуна мішалки М1 натискують на кнопку SВ2. Після спрацювання пускача КМ1 кнопкою SВ4 запускають двигун завантажувального конвеєра М2. При досягненні заданого рівня корму в корпусі змішувача розмикається контакт кінцевого вимикача SQ4 і завантажувальний конвеєр зупиняється. Після закінчення визначеного часу змішування двигун мішалки зупиняється натисканням кнопки SB1. Для автоматичного вимикання двигуна М1 мішалки після закінчення заданої витримки часу передбачені реле часу КТ1 і КТ2 з регульованими витримками 1-10 год. і 0,1-1 год. відповідно, що вмикаються перемикачем SА2.
Для вивантаження кормосуміші із змішувача кнопкою SВ6 вмикають двигун вивантажувального конвеєра М3, при цьому замикається контакт КМЗ у колі котушки KМ4.1. Кнопкою SB8 вмикають двигун М4, який відкриває засувку змішувача. Коли засувка відкривається повністю, кінцевий вимикач SQ2 перемикає контакти, внаслідок чого вимикається двигун привода засувки М4 і вмикається двигун вивантажувального шнека М5. Після вивантаження корму кнопкою SВ5 вимикають двигун вивантажувального транспортера, а кнопкою SВ9 вмикають двигун привода засувки М4 на обертання у бік її закривання. При цьому автоматично вимикається вивантажувальний шнек, а після закривання засувки контактом SQ3 вимикається двигун її привода. Силові кола від коротких замикань захищаються автоматичними вимикачами QF1-QF4, кола керування — запобіжниками FU1 - FU2. Від перегрівання двигуни конвеєрів і мішалки захищені пристроєм вмонтованого температурного захисту ВК. Для вмикання переносного світильника передбачено розетку ХS, що живиться від знижувального трансформатора ТV.
ЗАПИТАННЯ
1. Для чого призначена потокова лінія приготування коренеплодів? 2. З якого основного обладнання складається потокова лінія приготування коренеплодів? 3. Для чого призначена потокова лінія приготування концентрованих кормів? 4. З якого основного обладнання складається потокова лінія приготування концентрованих кормів? 5. Призначення та класифікація дозаторів. 6 Принцип дії та автоматизації дозаторів сипких та концентрованих кормів. 7. Принцип дії та автоматизації дозаторів подрібнених коренебульбоплодів. 8. Принцип дії та автоматизації живильників-дозаторів подрібнених стеблових кормів. 9. Технологія дозування та приготування кормів при використанні агрегату АПК-10А, принципи його автоматизації. 10. Технологія приготування кормосумішей при використанні змішувачів СКО-Ф та принципи їх автоматизації.
ТЕСТИ
1. В яких режимах працює лінія приготування коренеплодів?
A. Передбачено місцеве керування
B. Передбачено місцеве та автоматичне керування
C. Передбачено автоматичне керування
2. Які засоби автоматизація використовуються в лінії приготування коренеплодів?
A. Чотири реле часу
B. Два реле часу
C. Реле часу і електромагнітні заслінки.
3. Використовуючи принципову електричну схему керування лінії приготування коренеплодів вкажіть яким пристроєм встановлюються режими керування?
A. Кнопками керування SB1, SB3
B. Універсальними перемикачами SA1 і SА2
C. Універсальними перемикачами SA1 і SА2 та кнопками керування SB1, SB3
4. Використовуючи принципову електричну схему керування лінії приготування коренеплодів вкажіть якою кнопкою вмикається двигун завантажувального шнека при автоматичному керуванні?
A. Універсальним перемикачем SA2
B. Реле часу КТ4
C. Кнопкою керування SB7
5. Які засоби автоматизації використовуються в лінії приготування концентрованих кормів?
A. Реле часу
B. Реле часу та електромагніти заслінок
C. Електромагніти заслінок.
6. Використовуючи принципову електричну схему керування лінії приготування концентрованих кормів вкажіть для чого використовується реле часу КТ1?
A. Реле часу KT1 видержкою часу розімкне свій розмикаючий контакт в колі котушки пускача KM1двигуна дробарки М1для закінчення подрібнювання після подачі зерна.
B. Реле КТ1 видержкою часу подає напругу на котушку електромагнітних пускачів КМ3, який вмикає електродвигун М3 привода конвеєра
C. Реле часу KT1 видержкою часу розімкне свій розмикаючий контакт в колі котушки пускача KM2двигуна дробарки М2.
7. Використовуючи принципову електричну схему керування лінії приготування концентрованих кормів вкажіть для чого використовується електромагніт YA?
A. Електромагніт YA, відкриває подачу води
B. Електромагніт YA, відкриває і закриває заслінку бункера
Електромагніт YA, відкриває заслінку бункера
8. Чим забезпечується керування регулюванням подачі кормів в тарувальні ємності (бункери)?
A. Відповідною послідовністю включення електродвигунів.
B. Реле часу.
C. Датчиками рівня
9. Чим забезпечується регулюванням подачі кормів при використанні дозаторів безперервної дії (транспортерами)?
A. Підтриманням сталої частоти обертання їх електродвигунів та встановленням регулювльних заслінок на подачі.
B. Періодичним ввімкненням електродвигунів транспортерів
C. Порційною подачею кормів на транспортери.
10. Яку функцію в схемі керування агрегату АПК-10А виконує реле часу КТ1?
A. Забезпечує необхідний час роботи подрібнювача.
B. Забезпечує пуск електродвигунів агрегату після ввімкнення подрібнювача з витримкою в часі.
C. Забезпечує переключення обмоток двигуна подрібнювача з "зірки" на "трикутник" для зменшення його пускових струмів.
11. Яку функцію в схемі керування змішувача СКО-Ф виконують реле часу КТ1, КТ2?
A. Передбачені для забезпечення необхідної послідовності включення електродвигунів і створення витримки для їх виходу на номінальний режим.
B. Передбачені для автоматичного вимикання двигуна мішалки в режимах змішування з запарюванням та без запарювання.
C. Реле часу КТ1 і КТ2 з регульованими витримками 0,1 - 1 год., передбачені для автоматичного вимикання двигуна вивантажувального шнека після закінчення процесу змішування.
3.4. АВТОМАТИЗАЦІЯ КОРМОЦЕХІВ.
Кормоцехи - складова частина тваринницьких ферм і комплексів. Вони призначені для приготування кормових сумішей з різних видів кормів місцевого виробництва з добавками спеціальних компонентів промислового виробництва з урахуванням раціонів годівлі і виду тварин.
Основною складовою частиною кормоцеху є потокова технологічна лінія (ПТЛ). Число ПТЛ, як правило, визначається кількістю та видами кормів, що переробляються: грубих та концентрованих кормів; коренеплодів; жому; меляси, карбаміду; живильних розчинів, мінеральних добавок; збору компонентів і змішування; видачі готової кормової суміші.
Набір ПТЛ для даного поголів'я і зони визначає технологічну схему кормоцеху. ПТЛ різних типів кормоцехів комплектуються як серійними робочими машинами, так і машинами спеціальної розробки, що і визначають відмінності кормоцехів. Для приготування кормосумішей на свинофермах отримали розповсюдження комплекти устаткування КЦС, а на фермах великої рогатої худоби комплекти устанкування КОРК.
Кормоцех КОРК-15-1 забезпечує кормами (кормосуміш з соломи, силосу, коренебульбоплодів, концентрованих кормів і добавок карбаміду і меляси) молочні ферми на 400 – 1200 корів або 1000 – 3000 голів молодняку великої рогатої худоби при вирощуванні та відгодівлі.
Обладнання КОРК-15-1 включає в себе ряд машин, складаючих потокову технологічну лінію для подрібнення, змішування і видачі готової продукції. Перелік обладнання згідно з рисунком 3.17 зведено в таблицю 3.3.1.

Рисунок 3.17. Технологічна схема кормоцеху КОРК -15-1: 1, 15-лотки; 2, 16- конвеєри; 3-пилозвукозахисна стіна; 4, 18-транспортери; 5-транспортер вивантажувальний; 6-подрібнювач-змішувач ИСК-3; 7-обладнання ОМК-4; 8-пилозвукозахисна кабіна; 9-щит керування; 10-транспортер збірний; 11-бункер-дозатор коренеплодів; 12-транспортер гвинтовий; 13-бункери-дозатори концкормів; 14-подрібнювач ИКМ-Ф-10; 17-ротор подрібнення грубих кормів;19-живильник; 20-транспортер.
Технологічний процес приготування кормосумішей згідно з рисунком 3.17 відбувається таким чином: Грубі корма в тюках, рулонах, розсипом завантажуються на лоток 15 (живильника соломи ПС-Ф-6). Звідки конвеєром 16 вони подаються на ріжучі барабани ротора 17 і після часткового подрібнення транспортером 18 подаються на збірний транспортер 10. Паралельно в лоток 1 (живильника зеленої маси ПЗМ-1,5) подається силос, сінаж чи жом. Конвеєром 2 та транспортером 4 маса подається на змішування в подрібнювач-змішувач кормів (ИСК-3) 6.
Таблиця 3.3.1.
Обладнання кормоцеху КОРК-15-1.
|
Позначення на рис.3.3.1 |
Обладнання |
Установлені електродвигуни |
|
Лінія силосу |
||
|
Живильник зеленої маси ПЗМ – 1,5: |
||
|
1 |
Лоток |
М1* |
|
2 |
Конвеєр |
М7 |
|
4 |
Транспортер скребковий |
М6 |
|
Лінія збирання |
||
|
5 |
Транспортер вивантажувальний |
М3 |
|
6 |
Подрібнювач-змішувач ИСК – 3 |
М4 |
|
10 |
Транспортер збірний |
М5 |
|
7 |
Обладнання ОМК – 4 |
|
|
Лінія соломи |
||
|
Живильник соломи ПС – Ф – 6 : |
||
|
15 |
Лоток |
М1* |
|
16 |
Конвеєр |
М10 |
|
17 |
Ротор |
М9 |
|
18 |
Транспортер скребковий |
М8 |
|
Лінія коренеплодів |
||
|
11 |
Бункер-дозатор коренеплодів |
М15 |
|
14 |
Подрібнювач ИКМ – Ф – 10 |
|
|
Транспортер коренеплодів ТК – 5,0Б: |
||
|
19 |
живильник; |
М17 |
|
20 |
транспортер |
М16 |
|
Лінія концкормів |
||
|
12 |
Транспортер гвинтовий |
М11 |
|
13 |
Бункер-дозатор 1 |
М13 |
|
13 |
Бункер-дозатор 2 |
М14 |
*Лотки силосу та соломи приводяться в дію від одного гідронасоса з електродвигуном М1
Концентровані корми завантажуються в бункери-дозатори 13. Звідки дозовано гвинтовим транспортером 12 також поступають на збірний трансортер. Коренеплоди завантажуються в живильники 19 (транспортера ТК-5,0Б) і транспортером 20 подаються на миття та подрібнення в подрібнювач (ИКМ-Ф-10) 14 і подрібненні бункером-дозатором 11 подаються на збірний транспортер 10.
Приготований розчин карбаміду і меляси в обладнанні ОМК-4 7 подається по трубопроводам безпосередньо в форсунки подрібнювача-змішувача ИСК-3.
Всі перераховані компоненти доподрібнюються, перемішуються подрібнювачем-змішувачем ИСК-3 6 і вивантажуються транспортером 5 в транспортні засоби чи безпосередньо на роздачу тваринам.
Керування обладнанням КОРК-15 здійснюється оператором з одного щита керування, при чому щити керування установками ИКМ-Ф-10 та ОМК-4 розташовані окремо. Підготовка електрообладнання до роботи (рис.3.18., 3.19.) здійснюється рубильником Q1 та автоматичними вимикачами Q2 – Q8.
Натисканням кнопки S7 вмикається реле часу К18, яке через 10с одним своїм контактом вимикає попереджувальний дзвінок Н24, а іншим готує до роботи кола керування (9 – 11).
Електродвигун гідропідйомників лотків силосу та соломи М1 керується кнопковим постом S8 через електромагнітний пускач К1.
Лінія збірна (електродвигуни М3 – М5) вмикаються послідовним переключенням перемикача S21 через електромагнітні пускачі К3 – К5. Помилковість ввімкнення електродвигунів, як для збірної лінії, так і для послідуючих ліній виключена за рахунок використання в колах керування блокіровок. Після запуску лінії збирання контактом К5 в колі (11 – 23) будуть підготовлені до роботи кола керування інших ліній. Кінцевий вимикач S17 забезпечує блокіровку неможливості ввімкнення подрібнювача змішувача (М4) при відкритому кожусі.
Лінія силосу (М6, М7) і соломи (М8 – М10) вмикаються аналоічно лінії збирання відповідно перемикачами S22, S23.
Пуск лінії концкормів починається з ввімкнення транспортера (М11) за допомогою кнопкового поста S10 через електромагнітний пускач К11. Після чого можливе ввімкнення двигунів дозаторів концкормів (М13, М14) за допомогою кнопкових постів S11, S12 Через магнітні пускачі К13, К14.
Первинний пуск лінії коренеплодів виконується кнопкою S13, якою вмикається електродвигун дозатора (М15) через пускач К15. Допоміжний контакт електромагнітного пускача К15 також забезпечує ввімкнення подрібнювача ИКМ-Ф-10. Після запуску подрібнювача кнопкою S14 через замикаючийся контакт К28 вмикаються електромагнітні пускачі К16 і К17 відповідно транспортера (М16) і живильника (М17). Датчик рівня S15 через реле К25 автоматично керує роботою М16 і М17 в залежності від заповнення бункера - дозатора коренеплодів.


Обладнання ОМК-4, яке служить для внесення в кормосуміші мелясу і карбаміду автоматично вмикається і вимикається при ввімкненні і вимкненні збірного транспортера М5, про що сигналізують лампи Н26, Н27.
Датчики S24 та S25 передбачають сигналізацію про наявність концкормів в бункерах 1 та 2, про що інформують лампи Н20 та Н21. При переповненні бункерів під час завантаження з допомогою датчиків S26 та S27 через К26, К27 вмикаються сигнальні лампи Н17, Н18, Н22, Н23. Реле К19 – К24, які вмикаються після запуску кожної лінії, забезпечують ввімкнення аварійної сигналізації Н19, Н24.
Аварійна зупинка всього обладнання здійснюється кнопками S1 – S6. Вимикачем S30 забезпечується наладочний режим кожної лінії обладнання. Для контролю наявності напруги на щиті керування передбачено вольтметр РV. Контроль струмового завантаження електродвигуна подрібнювача-змішувача ИСК-3 здійснюється амперметром РА. Захист силових кіл від струмів короткого замикання здійснюється запобіжниками на вводі та автоматичними вимикачами Q2 – Q8, а в колах керування та сигналізації передбачено запобіжники F1 – F3. Захист електродвигунів від тривалих перевантажень здійснюється тепловими струмовими реле, що комплектуються разом з магнітними пускачами.
ЗАПИТАННЯ
1. Принципи побудови технологічних схем кормоцехів та управління ними. 2. Призначення кормоцеху серії КОРК-15-1 та технологія приготування кормосумішей в даних кормоцехах. 3.Поясніть роботу кормоцеху КОРК-15-1 в режимах "Робота" та "Наладка" за допомогою принципової електричної схеми.
ТЕСТИ
1. Для чого призначені кормоцехи?
A. Для готування кормових сумішей з різних видів кормів місцевого виробництва з добавками спеціальних компонентів промислового виробництва з урахуванням раціонів годівлі і виду тварин
B. Для готування кормових сумішей з різних видів кормів з добавками спеціальних компонентів промислового виробництва
C. Для готування кормових сумішей з різних видів кормів з урахуванням раціонів годівлі і виду тварин
2. Принцип побудови потоково-транспортних технологічних ліній кормоцеху?
A. Склад ПТЛ кормоцеху визначається потребами ферми у кількості та видах кормів, що переробляються.
B. Склад ПТЛ кормоцеху визначається потребами ферми у кількості кормів, що переробляються.
C. Склад ПТЛ кормоцеху визначається потребами ферми у видах кормів, що переробляються.
3. Принцип керування потоково-транспортними технологічнии лініями кормоцеху?
A. Технологічні лінії та машини в кожній лінії повинні вмикатися по ходу продукту.
B. Технологічні лінії та машини в кожній лінії повинні вмикатися обернено ходу продукту.
C. Технологічні лінії та машини в кожній лінії повинні мати незалежне керування.
4 . Для чого використовується реле часу в Схемі керування кормоцехом КОРК-15-1?
A. Реле часу К18 через 10 с вимикає попереджувальний дзвоник.
B. Реле часу через 10 с вимикає попереджувальний дзвоник і подає живлення на схему керування.
C. Реле часу через 10 с подає живлення на схему керування.
5. Для чого використовується пристрій S15 в схемі керування кормоцехом КОРК-15-1?
A. Для автоматичного керування лінією коренеплодів в залежності від рівня в дозаторі коренеплодів.
B. Для автоматичного керування лінією збору кормів в залежності від рівня в дозаторі
C. Для автоматичного керування лінією концентрованих кормів в залежності від рівня в дозаторі
8. Призначення реле К19-К24 в схемі керування кормоцехом КОРК-15-1?
A. Для ввімкнення аварійної світлової при вимкненні машин ліній кормоцеху.
B. Для ввімкнення світлової про роботу машин ліній кормоцеху.
C. Для забезпечення необхідної послідовності ввімкнення ліній кормоцеху.
РОЗДІЛ 4. АВТОМАТИЗАЦІЯ ТЕХНОЛОГІЧНИХ ПРОЦЕСІВ У РІЛЬНИЦТВІ
4.1. АВТОМАТИЗАЦІЯ ЗЕРНООЧИСНИХ ТА СОРТУВАЛЬНИХ МАШИН
Відповідно до прийнятої технології весь врожай зернових, бобових, олійних культур і насіння трав після комбайнового збирання підлягає очищенню, а близько 60% прибраного врожаю необхідно піддавати штучному сушінню.
Необхідність у післязбиральній обробці зерна (очищенню, сортуванню і сушінню) викликана тим, що зернова маса, що надходить з-під комбайнів, поряд із зерном містить до 20...30% бур'янистих і до 5% солом’яних домішок, а вологість зерна в залежності від кліматичних умов значно відрізняється від припустимої (14%) і досягає 30% і більш. Для післязбирального очищення і штучного сушіння зерна використовують стаціонарні зерноочисно-сушильні пункти.
Для цих пунктів промисловість випускає зерноочисні агрегати типу ЗАВ і очисно - сушильні комплекси типу КЗС продуктивністю від 10 до 100 т/г і вентильовані бункери місткістю до 100 т.
Для очищення і сортування зернової маси використовують повітрорешітні і трієрні машини, а сушать зерно в зерносушарках шахтного і барабанного типів і в установках активного вентилювання.
Кожен агрегат і комплекс, крім зазначених машин, містить набір транспортерів і норій, зернопроводи і накопичувальні ємності, пристрою для завантаження і розвантаження автотранспорту. повітряні циклони, щити і пульти керування машинами. Усі машини погоджені по продуктивності й об'єднані в єдину потокову лінію, що обслуговується одним-двома операторами.
Об'єднання машин у потокову лінію і їхню автоматизацію дозволили підвищити продуктивність праці в 7...10 разів і знизити собівартість обробки зерна в 2...3 рази в порівнянні з використанням цих же машин у розрізненому виді. Зерноочисні агрегати серії ЗАВ випускаються продуктивністю на 10, 20, 40, 50, 100 т/г і призначені для районів з відносно сухим кліматом, у яких вологість зерна з-під комбайна не перевищує 18%
Зерноочисно-сушильні комплекси, (КЗР-5, КЗС-10Ш, КЗС-20Ш, КЗС-40Ш, КЗС-50, КЗС-10Б и K3С-20Б) використовуються в зволожених зонах, у яких вологість зерна при збиранні перевищує 18%.
У господарствах, розташованих у зонах зі збиральною вологістю зерна 18...20%, на комплексі встановлюють бункера активного вентилювання (БВ-12,5, БВ-25, БВ-50).
У зонах з надлишковою вологістю на комплексах КЗС з індексом Ш установлюються шахтні зерносушарки типу СЗШ-8 і СЗШ-16 продуктивністю відповідно 8 і 16 т/г чи з індексом Б — барабанні зерносушарки типу СЗСБ продуктивністю 2, 4 і 8 т/г на сушінні продовольчого зерна.
Для злагодженої роботи потокових ліній агрегати і комплекси добре електрифіковані й автоматизовані. Агрегати типу ЗАВ мають від 6 до 16 електродвигунів сумарною встановленою потужністю від 16 до 47 кВт, а комплекси типу КЗС — від 22 до 34 електродвигунів сумарною потужністю від 65 до 150 кВт.
З засобів автоматики на агрегатах і комплексах широко використовуються прилади контролю і регулювання технологічних параметрів: датчики рівня сипучих матеріалів, датчики температури нагрівання теплоносія на вході і виході зерносушарки і температури зерна в сушарках і бункерах активного вентилювання, вологоміри для виміру відносної вологості повітря і вологості зерна, витратоміри зерна, прилади контролю полум'я в топці, різні реле, електромагнітні клапани, кінцеві вимикачі і т. п.
На основі цих засобів розроблені пульти і станції автоматичного керування агрегатами і комплексами післязбиральної обробки зерна, що автоматично забезпечують: послідовність пуску машин потокової лінії в напрямку, зворотному напрямку потоку зерна, починаючи з машини, установленої наприкінці лінії;
Зупинку всіх машин, що передують по потоці зерна будь-якій зупиненій машині потокової лінії;
Можливість ручного включення і відключення будь-якої машини при налагодженні без дотримання технологічних блокувань;
Включення аспираційної системи порід пуском машин і відключення всіх машин при зупинці аспираційної системи;
Програмне розпалювання топки і контроль її роботи;
Контроль температури теплоносія і нагрівання зерна;
Захист електроустаткування від струмів короткого замикання і перевантажень;
Роботу розвантажувальних пристроїв шахт і охолоджувальних колон сушарки;
Світлову сигналізацію про включення і відключення всіх двигунів машин і механізмів, про граничні рівні зерна в сушарках і технологічних ємностях і про відхилення температури теплоносія від заданого значення.
Крім світлової, мається аварійно - попереджувальна звукова сигналізація, що спрацьовує при аварійному зупинці якої-небудь машини, при переповненні технологічних ємностей, а також при загасанні полум'я в топці.
У схемах автоматики передбачені кнопкові пости для аварійної одночасної зупинки всіх працюючих машин у разі потреби.
Технологічні й електричні схеми автоматизації зернопункту розглянемо на прикладі автоматизації найбільше і широко розповсюдженого зерноочисно-сушильного комплексу КЗС-20Ш. Автоматизація інших агрегатів і комплексів виконана аналогічно.
Комплекс КЗС-20Ш призначений для післязбиральної обробки зернових, зернобобових і круп'яних культур. Комплекс складається з зерноочисного і сушильного відділень (рис. 4.1). Зерноочисне відділення включає завальну яму 27, автомобілепідйомник 16, завантажувальну двохпоточну норію 5, машину попереднього первинного очищення 6, повітряно - решітну машину 4, трієрний блок 1 , централізовану аспираційну систему 5, передавальні транспортери 2, транспортер відходів 19, комплект зернопроводів і блок бункерів: очищеного зерна 22, відходів 21, фуражу 20 і резервні бункери 18. Усі машини і пульти керування змонтовані на блоці бункерів, що одночасно є їх несучою конструкцією й ємностями для проміжного збереження оброблюваного зерна.
Сушильне відділення має сушарку СЗШ-16 із двома шахтами 20, 12, п'ять норій 7, 5, 11, 13, 15, охолоджувальні колони 8, 14 і станцію керування. Очисне і сушильне відділення технологічно зв'язані між собою зернопроводами.
Технологією керування передбачається можливість роботи комплексу по сімох різних варіантах: паралельно чи послідовно, за участю в роботі всіх чи окремих машин. Зерно з кузова автомобіля за допомогою автомобілепідйомника 16 вивантажують у завальну яму 17, відкіля завантажувальною норією 5 воно транспортується в машину попереднього очищення 6, а потім норіями 11 і 13 у шахти сушарки 10 і 12. Із сушарки висушене зерно подається за допомогою норій 9 і 15 в охолоджувальні колони 8 і 14 для охолодження зовнішнім повітрям, а потім норією 7 направляються на вітрорешітні машини 4 для подальшого очищення і транспортерами 2 на трієрні блоки 1 для сортування.

Рисунок 4.1. Технологічна схема комплексу КЗС-20Ш.
Очищене насіння і відходи надходять у відповідні секції блоку бункерів (рис. 4.1). Зерносушарка СЗШ-16 має дві шахти. При вологості зерна до 20% потік зерна розділяється й одночасно проходить через обидві шахти. При вологості понад 20% весь потік проходить обидві шахти послідовно. При рівнобіжній роботі шахт зерно норіями 11 і 13 рівномірно й одночасно розподіляється але двом шахтам. Висушене й охолоджене зерно норією 7 подається в резервний бункер 18 звідкіля самопливом надходить у другий потік завантажувальної норії 5.
При послідовній роботі шахт зерно з машини попереднього первинного очищення 6 норією 13 направляється в праву шахту 12. Просушене зерно розвантажувальною кареткою вивантажується в норію 15 і переміщається в охолоджувальну колону 14. Охолоджене зерно шлюзовим затвором вивантажується з колони 14 і направляється норією 11 у другу шахту 10 сушарки. Після сушіння другій шахті зерно норією 9 подається в охолоджувальну колону 8, відкіля через шлюзовий затвор порціонно вивантажується норією 7 у резервний бункер 18 а потім завантажувальною норією 5 подається на очищення.
У повітряних каналах від зерна відокремлюються легкі домішки і по системі повітропроводів виносяться в осадову камеру централізованої аспираційної системи 5, де домішки виводяться в секцію відходів, а очищене повітря вентилятором подається назовні.
У повітрорешітних машинах зернова суміш поділяється на три фракції: очищене зерно, фуражне зерно і відходи. Очищені зерно передавальними транспортерами 2 подається на трієрні блоки 1, де вони додатково очищаються від довгих і коротких домішок, що не відокремилися у повітрорешітних машинах.
У залежності від призначення і ступеня засміченості зерна трієрні блоки виставляють на паралельну чи послідовну роботу циліндрів. Чисте зерно і фракції очищення системою зернопроводів направляються у відповідні бункери.
Агрегати і комплекси для очищення зерна складаються з повітряно-решітних машин, трієрів. На повітряно-решітних машинах виконують попереднє, первинне і вторинне очищення. Трієри застосовуються для доведення продукції до певної кондиції, на трієрах відбувається розділ по довжині зерен.
Спрощена функціональна схема повітряно-решітної зерноочисної машини зображена на рис. 4.2.
Зернова маса з бункера ПБ за допомогою підживлювача П подається у повітряний канал першої операції, де з маси відокремлюються легкі домішки, які потрапляють до приймача ЛВ. Після чого зернова маса надходить на решітний сепаратор, який складається з трьох решіт І, II, III, нахилених під деяким кутом до горизонту, що приводяться в коливальний рух за допомогою електропривода. Верхнє решето є прохідним, через яке зерно основної культури просівається, а великі домішки проходять зверху і потрапляють у приймач ВВ. Нижні решета відокремлюють від потоку дрібні домішки, а основне зерно проходить через канал другої повітряної аспірації, де повітря виносить дрібні, легкі домішки, і потрапляє в бункер чистого зерна.
Як бачимо, для регулювання процесу очищення застосовується підживлювач П, який може змінювати подачу зерна в машину та заслінки ПЗ, які змінюють швидкість руху повітря в каналах аспірації.
За довжиною зерно проходить очищення на циліндричному трієрному обладнанні. Зернова маса розділяється чарунковою поверхнею циліндрів. На внутрішній поверхні робочого циліндра 1 (рис. 4.3) розташовані чарунки. Циліндр встановлений горизонтально, або під кутом 1,5° і весь час обертається. В середині циліндра розташований жолоб. Короткі зерна 4, що западають у чарунки при обертанні циліндра, потрапляють у жолоб 2, виводяться зовні за допомогою шнеку. Довгі зерна 3 сходять з циліндра при його обертанні.

Рисунок 4.2. Функціональна схема повітряно-решітної машини для зерноочищення: ПБ — приймальний бункер; П — підживлювач; І, II, III — решета; ПЗ — вітряні заслінки; ЛВ — приймач легких відходів; ВВ — приймач великих відходив МВ — приймач малих відходів; БЗ — бункер зерна
Регулювання процесу в трієрах може відбуватися тільки зміною подачі зернової маси в трієр.
|

У залежності від призначення і ступеня засміченості зерна трієрні блоки виставляють на паралельну чи послідовну роботу циліндрів. Чисте зерно і фракції очищення системою зернопроводів направляються у відповідні бункери.
Для захисту кіл живлення електродвигунів від струмів короткого замикання встановлено автоматичні вимикачі QF2 – QF5 серії ВА51Г25, захист електродвигунів від перевантаження здійснюється за допомогою тепловихреле КК – КК11 серії РТЛ.
Дистанційнекерування електродвигунами установки здійснюється за допомогою магнітних пускачів серії ПМЛ.
Принципова електрична схема автоматичного керування очисним відділенням комплексу КЗС-20Ш показана на рисунку 3.4. У залежності від кількості і засміченості зернової маси установлюють відповідне положення перемикачів SA1 і SA2, якими дається режим роботи устаткування по сімох різних варіантах: при перемиканні перемикача SA1 у положення 3 можлива робота всіх машин попередньої, повітряно - решітної і трієрного очищення, а також загальна робота першої чи другої лінії машин у залежності від вмикання перемикача SA2 (положення 1 чи 2). Якщо перемикач SA1 знаходиться в положення 1, то можлива робота машин у вищевказаних трьох варіантах, але без трієрних блоків. Коли перемикач SA1 у положенні 2, працює також машина попереднього очищення.
Щоб запобігти завал зерна при пуску і зупинці машин послідовність пуску електроприводів машин протилежна руху зерна, а послідовність зупинки збігається з потоком зерна. Як приклад розглянемо роботу схеми при включенні машин по основному варіанті, коли включаються всі машини. Спочатку включають автомати QF1...QF5, перемикач SA1 ставлять у положення 5, a SA2 у положення 2 і кнопкою SB10 подають попереджувальний звуковий сигнал НА про пуск машини, а потім кнопкою SB1 включають у роботу електропривод М1 (15 кВт) централізованої аспираційної системи. Після цього кнопками SB4 і SB6 включають електроприводи М2 і МЗ потужністю по 2,2 кВт, двох блоків трієрів. Передатні транспортери і повітряно - решітних машини працюють від електроприводів відповідно М4, М5 (по 1,5 кВт) і М6, М7 (по 1,1 кВт). Їх включають кнопками SB4, SB6 і SB5, SB7 після замикання блок - контактів КМ2:2 і КМ3:2 у ланцюгах магнітних пускачів КМ4...КМ7. Тільки після цього можна включити кнопкою SB 16 через блок - контакти КМ6:2 чи КМ7.2 електроприводи М8 (3 кВт) норії, М9 (1,1 кВт) машини попереднього очищення і М10 (1,5 кВт) транспортера відходів, а потім кнопкою SB9 — електропривод М11 (4 кВт) завантажувальної норії. Автомати заслінки норії АЗН1 і АЗН2 відкриваються автоматично від блок - контактів КМ11:2.
Зупиняють машини в зворотній послідовності, натискаючи кнопки «Стоп» SB9...SB1.
У випадку переповнення бункерів переключаються контакти датчиків рівня SL1...SL4 і включається звуковий сигнал НА, а відповідна сигнальна лампа HL11...HL14 Вимкнеться.
 Рисунок 4.4. Принципова електрична схема автоматичного керування зерноочисного агрегату КЗС – 20Ш
Рисунок 4.4. Принципова електрична схема автоматичного керування зерноочисного агрегату КЗС – 20Ш
ЗАПИТАННЯ
1. Що входить в післязбиральну обробку зерна? 2. Які агрегати використовують для післязбирального очищення і штучного сушіння зерна ? 3. Які Засоби автоматизації використовуються на агрегатах і комплексах? 4. За допомогою технологічної схеми комплексу КЗС-20Ш покажіть, як здійснюється очистка та сушка зерна? 5. Поясніть роботу принципової електричної схеми керування зерноочисним агрегатом.
ТЕСТИ
1. Які агрегати використовують для очищення зерна?
A. КЗС-20Ш, КЗС-10Б
B. СЗШ-16, СЗШ-8
C. СЗШ-16, СЗСБ-8
2. Яке очищення виконують на повітряно-решітних машинах?
A. На повітряно-решітних машинах виконують первинне і вторинне очищення
B. На повітряно-решітних машинах виконують попереднє і первинне очищення
C. На повітряно-решітних машинах виконують попереднє, первинне і вторинне очищення
3. Для чого використовують трієра?
A. Трієри застосовуються для доведення продукції до певної кондиції, на трієрах відбувається розділ по довжині зерен
B. Трієри застосовуються для доведення продукції до певної кондиції.
C. На трієрах відбувається розділ по довжині зерен
4. Які пристрої потрібно використовувати для контролю наявності зерна в бункерах зерноочисного агрегату?
A. Кінцеві вимикачі.
B. Кінцеві вимикачі, контактні датчики рівня зерна.
C. Контактні датчики рівня зерна.
5. Який пристрій потрібно використати, щоб виключити завал двохпоточної норії зерна зерноочисного агрегату?
A. Автомат заслінки норії, який відкриває подачу зерна одночасно з вмиканням приводу норії.
B. Автомат заслінки норії, який відкриває подачу зерна завчасно до вмиканням приводу норії.
C. Електромагнітний виконуючий механізм.
6. За допомогою принципової електричної схеми керування зерноочисного агрегату вкажіть в яким вмикається електродвигун М7 повітряно – решітчастої машини в основному режимі?
A. Четвертим після двигуна М1 вентиляційної системи, М2 приводу трієра, М4 привода передавального транспортера
B. Четвертим після двигуна М1 вентиляційної системи, М3 приводу трієра, М5 привода передавального транспортера.
C. Третім після двигуна М3 приводу трієра, М5 привода передавального транспортера.
7. За допомогою принципової електричної схеми керування зерноочисного агрегату вкажіть яким пристрій керує роботою АЗН?
A. Кнопки керування SВ16, які вмикають АЗН.
B. Магнітний пускач КМ11, який контактом КМ11.2 подає напругу на АЗН.
C. Автоматично за допомогою датчиків рівня зерна.
8. За допомогою принципової електричної схеми керування зерноочисного агрегату вкажіть призначення датчиків рівня SL1...SL4?
A. У випадку переповнення бункерів з зерном переключаються контакти датчиків рівня SL1...SL4 і вмикається звуковий сигнал НА, а відповідна сигнальна лампа HL11...HL14 вимкнеться
B. В випадку звільнення бункерів від зерна вмикають звуковий сигнал
C. У випадку переповнення бункерів з зерном переключаються контакти датчиків рівня SL1...SL4 і вмикається сигнальна лампа HL11...HL14
4.2. АВТОМАТИЗАЦІЯ ЗЕРНОСУШАРОК
Для сушіння зерна після його збирання та попереднього очищення застосовують барабанні, шахтні зерносушарки та обладнання активного вентилювання. В барабанних сушарках неможливо витримати задані режими сушіння як продовольчого, так, особливо, насіннєвого зерна. Обладнання активного вентилювання має досить невисоку продуктивність і поки що відіграють допоміжну роль. Тому для сушіння зерна найбільше застосовують шахтні сушарки безперервної дії: типів Т662, Т663 фірми «Пектус» (Німеччина) та вітчизняні сушарки типу СЗШ-16, що входять до комплексів КЗС-20Ш.
Технологічна схема зерносушарки СЗШ-16 зображена на рис. 4.5. Зерно із завантажувального бункера 1 надходить до норії 3, яка подає вологе зерно до сушарки. Сушарка складається з двох паралельних шахт з жалюзями. Вологе зерно переходить спочатку по правій шахті, де висушується за допомогою агенту сушіння, яке поступає з теплогенератора 10. Просушене в правій шахті зерно за допомогою норії 2 поступає в охолодник 1, де продувається зовнішнім повітрям і охолоджується. Після охолодження відбувається другий прохід зерна через сушарку по лівій шахті, охолоднику 7 за допомогою норій 5 і 6. Висушене зерно норією 8 подається до зерносховища 9.
Необхідний рівень зерна в сушарці контролюється датчиками мінімального і максимального рівня, що встановлені в надсушильних бункерах. Датчики рівня керують роботою порціонного розвантажувального пристрою: при досягненні мінімального рівня зупиняється електродвигун розвантажувальної каретки, при досягненні максимального рівня електродвигун розвантажувальної каретки вмикається знову. Надлишок зерна з надсушильного бункера по зерносливам повертається в завальну яму.
У нижній частині шахт у патрубках встановлені датчики температури для дистанційного виміру температури нагрівання зерна в потоці.
Висушене зерно норіями 6, 2 піднімається і скидається в лоткові витратоміри, звідкіля попадає в охолодники 1, 7. Охолодники виконані з двох коаксиально розташованих циліндрів. До малого внутрішнього циліндра зверху приєднаний всмоктувальний патрубок вентилятора, за допомогою якого виділяється відпрацьоване повітря. Зерно розташовується між перфорованими стінками внутрішнього і зовнішнього циліндрів і прохолоджується завдяки всмоктуванню повітря через його шар.
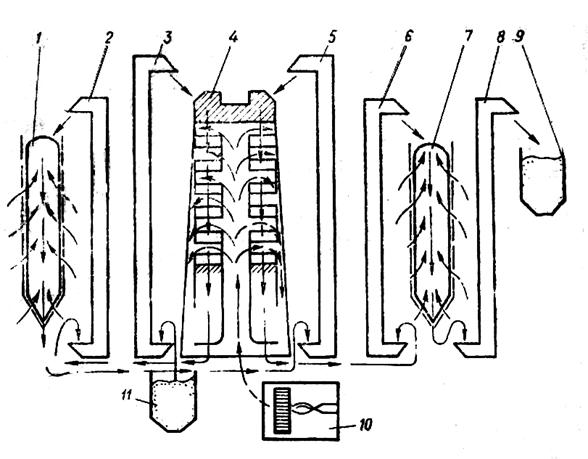
Рисунок 4.5. Технологічна схема сушарки СЗШ-16:
1, 7 — охолодники; 2, 3, 5, 6, 8 - норії; 4 -- зерносушарка; 9 — зерносховище; 10 — теплогенератор; 11 -— завантажувальний бункер;
![]() зерно,
зерно, ![]() - агент сушіння.
- агент сушіння.
Нижня частина охолодника закінчується конусом, під яким розташований шлюзовий затвор для періодичного порціонного розвантаження колони.
Виконавчий механізм шлюзового затвора керується від датчиків рівня зерна, що контролюють верхній і нижній припустимий рівень зерна у верхній частині охолодника. При максимальному рівні зерна шлюзовий затвор відкривається, при мінімальному — закривається. Охолоджене зерно подається норією на подальше очищення.
Технологічна схема топки для зерносушарки СЗШ-8 показана на рис. 4.6.
Система подачі палива складається з паливного бака 18, насоса 27, манометра 2, зливального крана 15, дроселя 20, золотника 19, форсунки 4, газодувки 11 і трубопроводів 16 подачі палива.
Камера згоряння 7 топки має екран 5 і кожух 6 з вуглецевої стали. У передній частині змішувальної камери 9 («равлика») установлений запобіжний клапан 10, що охороняє топку від вибуху при раптовому запаленні парів палива.
Рідке паливо до форсунки 4 надходить за допомогою шестеренного насоса 17. Дистанційне керування подачею палива здійснюють за допомогою золотника 9, а тиск впорскування встановлюють дроселем 30. Повітря, необхідний для згоряння палива, подається до форсунки ротаційною газодувкою 11 через крани 12 і 13. Вентилятор 14 подає повітря в топки до 9 тис. м/ч. При пуску топки включають електродвигуни вентиляторів топки і паливний насос 17. За допомогою трансформатора 2 і високовольтної свічки запалювання 3 запалюється полум'я в топці, наявність якого контролюється спеціальним фотодатчиком. Якщо паливо не запалюється, то через 15 с. привод вентилятора топки і паливного насоса відключається.
При роботі топки в змішувальну камеру 9 надходять топкові гази, а по кільцевих зазорах між стінками камери згоряння, екраном 5 і кожухом 6 — зовнішнє повітря. Для кращого змішування газів з повітрям установлений відбивач 8.
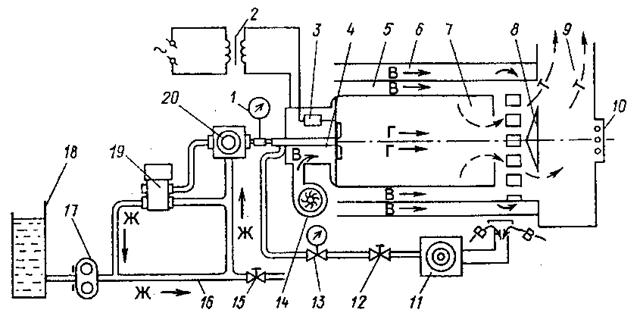
Рисунок 4.6. Технологічна схема топки зерносушарки СЗШ-8:
-ж--рідке паливо; - Г - — топкові гази; - В - — повітря; - Т - — теплоносій.
Барабанні зерносушарки СЗПБ-2, СЗСБ-4 і СЗСБ-8 продуктивністю відповідно 2, 4 і 8 т/г використовують для сушіння продовольчого зерна, насіння трав, а також для готування білково-вітамінного трав'яного борошна. Розглянемо технологічну схему (рис. 4.7) зерносушарок СЗСБ-8, якими комплектуються комплекси післязбиральної обробки зерна типу КЗС-20Б. Вона включає топку 2, завантажувальну камеру 5, сушильний барабан 4 з піднімальними лопатками 5, розвантажувальну камеру 7, елеватор 9, охолоджувальну колону 10 зі шнеком 12. Привод механізму сушильного барабана здійснюється електродвигуном потужністю 7,5 кВт через двоступінчастий редуктор і приводні ремені. Зерно в сушильний барабан повинно надходити рівномірним і безперервним потоком. Зерно в барабан подається по гвинтових доріжках, зайве зерно пересипається через підпірне кільце завантажувальної камери і направляється через клапан-блимавку 13 у прийомний бункер.
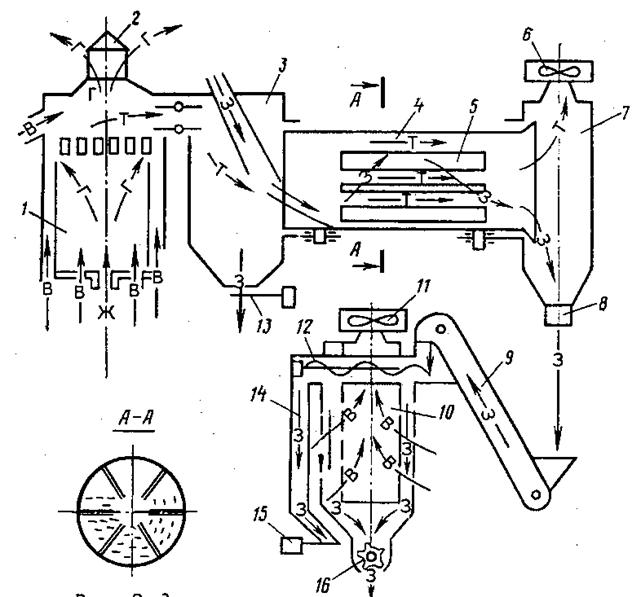
Рисунок 4.7. Технологічна схема зерносушарки СЗСБ-8:
З - — зерно; - ж - — рідке паливо; - г - — топкові гази; - в - — повітря; - т - — теплоносій.
Під впливом теплоносія і лопаток 5 зерно переміщається уздовж барабана і висипається в розвантажувальну камеру 7. З камери 7 зерно через шлюзовий затвор 8 направляється елеватором 9 в охолоджувальну колону 10. В охолоджувальній колоні зерно переміщається зверху вниз і за допомогою вентилятора 11 продувається зовнішнім повітрям і прохолоджується. У верхній частині колони розташований горизонтальний шнек 12 для подачі і розрівнювання зерна. Зайве зерно при завантаженні колони попадає в зернослив 14, на кінці якого закріплений клапан 15 з контактним датчиком. Від контактного датчика і датчика верхнього рівня зерна вмикається шлюзовий затвор 16, що випускає порцію зерна. Випуск зерна припиняється в момент спрацьовування датчика мінімального рівня, встановленого у нижній частині охолоджувальної колони.
Теплоносій готують у топці 1 шляхом спалювання рідкого палива (суміш 75% гасу і 25% моторного палива) і нагрівання топковими газами повітря, подаваного в топку. Побічні гази видаляються через трубу, відпрацьований теплоносій викидається в атмосферу вентилятором 6.
Принципова електрична схема керування двома зерносушарками СЗБ-8, що входять у комплект КЗС-20Б, показана на рисунку 4.8. Вона складається з ланцюгів дистанційного пуску й зупинки агрегатів, керування топкою, світлової і звукової сигналізації.
Автоматами QF1 і QF2 і перемикачем SA1 вибирають заданий варіант роботи обладнання: робота тільки першої чи другої зерносушарки або їхня спільна робота (положення перемикача SA1 буде відповідно в 1, 2 чи 3).
Перед пуском зерносушарки вмикають автомати SF1 і SF2, які подають напругу в схему керування, і кнопкою SB2 вмикають магнітний пускач КМ16.
Блоки-контакти KM16:3 через реле KV3 вмикають попереджувальний звуковий сигнал НА, що після пуску агрегатів знімають кнопкою SB21 через реле KV1...KV3.
Розглянемо роботу схеми (рис 4.8) при пуску першої зерносушарки. Кнопками SB4 і SB6 вмикаються електроприводи M1 (10 кВт) вентилятора 6 сушильного барабана 4 і М2 (4 кВт) топки 1. Від блоків-контактів КМ2:3 спрацьовує реле витримки часу КТ1, що через 150 с своїм контактом КТ1:1 вмикає трансформатор запалювання TV1 і електромагнітний клапан YА1 подачі палива. З появою полум'я в топці спрацьовує фотореле KV5, що вмикає реле KV4.
Останнє стає на самопідживлення через свій контакт KV4 і вимикає реле КТ1.
Якщо протягом 15 с у топці полум'я при пуску не виникає, то реле КТ1 на 165 с з моменту пуску шунтує ланцюг R і цим викликає спрацьовування реле KV5, а потім реле KV4. Реле KV4 одним контактом вимикає реле часу КТ1, а другим контактом розриває одну з двох ланцюгів живлення магнітного пускача КМ2. Реле КТ1, розшунтовує ланцюг R, вимикає фотореле KV5, а останнє розриває ланцюг живлення KV4, а потім КМ2, і вентилятор топки вимикається. Блоки-контакти КМ2:3 знімають напруга з автомата контролю полум'я і вимикають через контакти реле KV1:2 звуковий сигнал НА. Аналогічним чином працює схема при загасанні полум'я в топці з будь-яких причин. Повторний пуск оператором можливий тільки після усунення причин загасання полум'я.
При успішному пуску топки кнопками SB12 і SB14 вмикають магнітні пускачі КМ5 і КМ6 електродвигунів М5 (7,5 кВт) сушильного барабана 4 і М6 (5,5 кВт) вентилятора 11 охолоджувальної колони 10.
Магнітні пускачі КМ13...КМ15 за допомогою кнопок SB16...SB20 вмикають відповідно електроприводи двохпоточної норій: М13 — охолоджувальної колони, М14 — розвантаження сушарок і М15 — проміжних норій. Потужність кожного електродвигуна норії дорівнює 2,2 кВт.

Рисунок 4.8. Принципова електрична схема керування барабанними зерносушарками СЗБ-8.
Тільки після вмикання розвантажувальної норії сушарок можна ввімкнути кнопкою SB8 електропривод МЗ розвантажувального пристрою 8 сушарки.
Аналогічно вмикаються і вимикаються електродвигуни М7...М12 другої зерносушарки.
Електроприводом М4 розвантажувального пристрою 16 охолоджувальної колони 10 можна керувати вручну за допомогою кнопок SB9 і SB10 чи автоматично за допомогою датчиків рівня зерна (перемикач SA2 у другому випадку ставлять у положення 2).
Величини нижнього і верхнього рівнів зерна в охолоджувальній колоні контролюються датчиками рівня SL1 і SL2. Якщо рівень зерна досягне граничного нижнього значення, то розмикаються контакти SL1 і розвантаження охолоджувальної колони припиняється. Коли зерно досягає граничного верхнього рівня, то замикаються контакти спочатку SL1 а потім SL2 і починається розвантаження колони.
Зупиняє зерносушарку оператор, по черзі вимикаючи обладнання в послідовності, зворотної пуску, за допомогою кнопок «Стоп» SB1...SB19. В екстрених випадках одночасно всі машини зупиняють кнопкою SB чи SB1.
ЗАПИТАННЯ
1. Яке обладнання використовується для сушіння зерна після його збирання та попереднього очищення? 2. Які недоліки барабанних зерносушарок? 3. Які недоліки обладнання активного вентилювання зерна? 4. Які переваги шахтних зерносушарок? 5. Чим керуються дАтчики мінімального і максимального рівня Зерна в шахтній зерносушарці? 6. Для чого призначені барабанні зерносушарки? 7. Поясніть роботу барабанної зерносушарки по технологічній схемі. 8. Поясніть роботу барабанної зерносушарки по принциповій електричній схемі.
ТЕСТИ
1. Які пристрої використовуються для контролю рівня зерна в шахтній зерносушарці?
A. Датчиками мінімального рівня зерна.
B. Датчиками максимального рівня зерна.
C. Датчиками мінімального і максимального рівня зерна.
2. Де розміщуються дАтчики мінімального і максимального рівня Зерна в шахтній зерносушарці?
A. Встановлені в шахті
B. Встановлені в надсушильних бункерах шахт
C. Встановлені в повітропроводі шахт
3. Які автоматичні пристрої використовуються для керування кількістю зерна в охолоджувальній колоні шахтної зерносушарки?
A. Датчики рівня зерна та виконавчий механізм шлюзового затвора
B. Датчики рівня зерна
C. Виконавчий механізм шлюзового затвора
4. Для чого використовуються Виконавчий механізм шлюзового затвора в охолоджувальній колоні шахтної зерносушарки?
A. Для періодичного завантаження колони
B. Для періодичного порціонного розвантаження шахти
C. Для періодичного порціонного розвантаження колони
5. Для чого використовуються датчики рівня в барабанній зерносушарці СЗБ-8?
A. Для контролю верхнього рівня зерна в охолоджувальній колоні
B. Для контролю нижнього і верхнього рівнів зерна в охолоджувальній колоні
C. Для контролю нижнього рівня зерна в охолоджувальній колоні
6. Де розміщується фотодатчик в барабанній зерносушарці СЗБ-8?
A. В топці теплогенератора барабанної зерносушарки
B. В охолоджувальній колоні
C. В барабані зерносушарки.
7. Де розміщуються датчиками рівня в барабанній зерносушарці СЗБ-8?
A. В барабані зерносушарки
B. В охолоджувальній колоні
C. В теплогенераторі барабанної зерносушарки
4.3. АВТОМАТИЗАЦІЯ ПРОЦЕСУ АКТИВНОГО ВЕНТИЛЮВАННЯ ЗЕРНА
Активне вентилювання зерна застосовують для сушіння насіннєвого зерна, для тимчасової консервації зерна охолодженням та аерації насіння при тривалому зберіганні.
Активне вентилювання – це різновид конвективного способу сушіння продукту. Особливість такого способу полягає в досить низьких температурах агенту сушіння, що не призводить до теплового травмування зерна. При цьому нерухомий достатньо товстий шар зерна продувається потоком повітря, який поглинає вологу із зерна доти, поки не настане гігроскопічна рівновага зерна та повітря. Наприклад, при температурі 200С для вологості зерна 14% відповідає відносна вологість повітря 65%.
Обладнання для активного вентилювання зерна може функціонувати залежно від ефективності процесу сушіння трьома різними способами.
Перший спосіб полягає в продуванні звичайного повітря навко-лишнього середовища через шар зерна. У цьому випадку тривалість сушіння значно збільшується. Відомо, що зберігання вологого зерна досить обмежене. Наприклад, при зберіганні зерна вологісттю понад 18% протягом 6…8 діб починається його псування. Ось чому такий спосіб функціонування обладнання для активного вентилювання зерна не знаходить широкого застосування.
Другий спосіб полягає у використанні устаткування для вентилювання зерна як сушарок періодичної дії. Агент сушіння попередньо підігрівається до 45…50С. У цьому випадку відносна вологість повітря , що продувається становить 15…30%, що відповідає 5…8% зрівноваженої вологості зерна. Так при висушуванні зерна початковою вологістю 25% нерівномірність вологості становить 12%, а прошарки зерна, що прилягає до внутрішнього циліндра, висушується до вологості 3…4%. Тому для підвищення рівномірності сушіння зерна його необхідно перемішувати під час сушіння. Це здійснюється шляхом пересипання зерна з одного бункера в інший один два рази за період сушіння залежно від початкової вологості зерна.
Найдоцільнішим способом сушіння зерна активним вентилюванням є третій спосіб, який передбачає продувати шар зерна повітрям з відносною вологістю, яка відповідає або трохи нижча за зрівноважену вологість зерна. Відомо, що нагрівання повітря на 1оС знижує його відносну вологість приблизно на 5% , то достатньо нагріти повітря навіть вологісттю 100% на 7оС, щоб вологість агрегата сушіння становить 65%. При такому способі функціонування обладнання для активного вентилювання зерна нерівність сушіння майже відсутня, а тривалість сушіння не досягає допустимих сроків зберігання вологого зерна. Така схема реалізована у відчизняному устаткуванні для активного вентилювання зерна бункерами БВ – 6, БВ – 12,5, БВ – 25, БВ – 50 та бункерами К – 878 фірми "Пектус" (НДР). Бункер активного вентилювання зерна типу БВ – 25 має вмістимість по насіневій пшениці 25 тонн. Встановлена потужність електроспоживачів бункера БВ – 25 становить 41,5 кВт, в тому числі підігрівників повітря 36 кВт при подачі повітря 5600м/год.
Розглянемо технологічну схему проведення активного вентилювання зерна бункером БВ-25. Робота здійснюється слідуючим чином. Норія 1 (рис.4.9.) завантажує зерно у бункер 2, який має циліндричну форму і виконаний із штампованих перфорованих секцій. Зерно засипається між внутрішнім і зовнішнім циліндрами, де здійснюється вертикальне і горизонтальне (радіальне) повітророзподілення. В центрі бункера встановлена перфорована повітророзподільча труба 3, в середині якої переміщується поршень - заслінка 4. Розвантажується бункер самопливом через люк 5. Вентилятор 6 проганяє повітря через електрокалорифер 7 і подає його в масу зерна. Повітря пронизує шар зерна від внутрішнього циліндра до зовнішнього і відбирає надлишкову вологість. Електрокалорифер 7 вмикається в роботу при вологості зовнішнього повітря більше 65% і підігріває повітря лише на 5…6 оС.
Схема живлення і захисту електроспоживачів бункера активного вентилювання зерна зображена на рисунку 4.10.
Живиться система активного вентилювання зерна бункера БВ – 25 від стандартного джерела живлення змінного струму частотою 50 Гц на напругу 0,4 кВ по чотирьохпровідній системі. В якості ввідного апарата використовується роз'єднувач QS типу Р16–3СВ2000У3, який призначений для створення видимого розриву в електричному колі при обслуговуванні установки.
Для захисту електродвигунів від коротких замикань ми використовується автоматичні вимикачі QF1…QF3 типу ВА51Г25 із комбінованими розчіплювачами. Для захисту нагрівної системи ЕК від коротких замикань автоматичний вимикач QF4 типу ВА51–31 із електромагнітними розчіплювачами. Для захисту кола керування від коротких замикань автоматичний вимикач SF типу ВА51 – 10. Для дистанційного керування електроспоживачами установки та захисту від надмірного зниження напруги джерела живлення використовуються електромагнітні пускачі КМ1…КМ5 типу ПМЛ.

Рисунок 4.9. Технологічна схема бункера активного вентилювання
Зерна на базі бункера БВ – 25.
1 – Завантажувальна норія; 2 – Зовнішній перфорований циліндр; 3 – Внутрішній перфорований циліндр; 4 – Поршень – заслінка; 5 – Вивантажувальний люк; 6 – центробіжний вентилятор; 7 – Нагрівна система; 8 – Трос лебідки приводу поршня; 9 – приводна станція лебідки; 10 – Задатчик положення поршня;
Принципова електрична схема керування бункером БВ –25 представлена на рисунку 4.11. Дана схема керування передбачає роботу установки по двох взаємозв'язаних підсистемах.
Причому система завантаження зерна в бункер та руху поршня – заслінки є задаючою і без її впливів неможлива робота другої підсистеми керування мікрокліматом в масі зерна бункера.
Так як бункер активного вентилювання зерна може виконувати дві функції переробки зерна то перемикачем SA2 ми вибираємо їх почерговість. Положення SA2 "С" – сушіння вологого зерна до необхідних кондицій та "К" – консервація зерна, тобто зберігання зерна після його пересушування. Перемикачем SA1 ми вибираємо режим роботи схеми керування ( "Р" ручне керування установкою оператором із постійним візуальним контролем та "А" – автоматичне керування без участі оператора ).В ручному режимі керування, оператор натискує кнопки SB1…SB2 та контролює роботу завантежувальної норії та поршня-заслінки за допомогою SB7…SB8. Після заповнення бункера зерном він зупиняє електропривід M1 завантажувальної норії натиснувши SB1 і обезживши КМ1. А за допомогою кнопки SB7 піднімає до верху поршень – заслінку на рівень зерна у бункері. Процес підготовки бункера до початку сушки зерна завершено.
 Рисунок 4.10. Принципова електрична схема живлення і захисту
Рисунок 4.10. Принципова електрична схема живлення і захисту
електроспоживачів бункера БВ – 25
Для початку сушки зерна оператор натискує кнопку SB4 і заживлює через кнопку КМ2 електродвигун М2 приводу центробіжного вентилятора. Вентилятор продуває повітря через зерно, а оператор слідкує за показами вологомірів В1 та В2. Якщо вологість повітря, яке проходить через зерно не зменшується (в бункер подається вологе повітря) оператор натискає кнопку SB6 і заживлює через кнопку КМ5 електронагрівну систему ЕК. В масу зерна вже буде подаватися лиш вологе зерну повітря за рахунок його нагріву, а оператор слідкує за показами вологомірів В1 та В2. При необхідності він відключає нагрівну систему ЕК натиснувши SB5. Після закінчення сушки зерна оператор або звільняє бункер від висушеного зерна через вивантажувальний нижній люк або переводять за допомогою SA2 бункер в режим консервації. При цьому режимі роботи оператор слідкує за температурою зерна по показах датчика – регулятора SK, і за допомогою вентилятора на нагрівної системи підтримує цю температуру в нормі.
В автоматичному режимі роботи установки ( перемикач SA1 в "А" –автоматичне) всі функції оператора беруть на себе відповідні технічні засоби автоматики. Коли бункер не завантажений зерном на сушку чи консервацію датчик SL1 верхнього рівня зерна в бункері замкнутий і пускач КМ1 заживлює електродвигун М1 приводу завантажувальної норії та контактом КМ1.4 пускач КМ3 приводу поршня – заслінки М2, а контактом КМ1.3 унеможливлює роботу схеми керування вентиляційної установки. Йде процес завантаження зерном бункера до встановленого верхнього рівня SL1 і при його досягнені датчик – реле SL1 розмикає свій контакт і обезживлює КМ1, який в свою чергу зупиняє лебідку приводу поршня –заслінки та запускає в роботу систему підтримання мікроклімату в масі зерна (замикається КМ1.3).
В режимі сушка зерна (положення SA1–"С" – сушка) контакт КМ1.3 заживлює програмне реле часу КТ, яке своїм контактом КТ1 через замкнутий контакт датчика нижнього рівня SL2 заживлює магнітний пускач КМ2, який в свою чергу заживлює своїми силовими контактами електродвигун М2 приводу центробіжного вентилятора та контактом КМ2.4 підготовлює до роботи коло керування електронагрівною секцією ЕК. Вентилятор продуває зовнішнє повітря через зернову масу бункера. Контакт КТ буде замкнутий 120 секунд, цього часу достатньо щоб зовнішнє повітря пройшло зернову масу і вийшовши із бункера попало на датчик вологомір В2. Якщо вологість повітря вища ніж 65% то вологість В2 заживить реле напруги КМ2 і через його контакт КМ2 навіть по виходу 120 секунд часу вентилятор буде продувати повітря через зерно поки винесення вологості із зерна не стане меншим 65%. Одночасно із вище описаним процесом контролю вологи із зерна проходить контроль вологості повітря яке вноситься в зерно за допомогою датчика – вологоміра В1. Якщо зовнішнє повітря, яке подається в бункер вентилятором стане вологим більше 65% то В1 заживить реле КV1, яке своїм контактом КV1 подасть живлення на магнітний пускач КМ5. Пускач КМ5 своїми силовими контактами КМ5.1 заживлять електронагрівну систему ЕК електрокалорифера. Зовнішнє повітря проходячи через нагрівну систему почне підігріватися і знижувати відносну вологість нижче 64%. Електрокалорифер підігріває зовнішнє повітря на 5…6 0С, що відповідає знижунню вологості зерна на 25…30%. Таким чином проводиться сушка зерна до тих пір поки його вологість не стане нижчою заданої 13…15%. Після закінчення сушки, оператор, переводить бенкер в режим зберігання (консервації). При цьому режимі роботи керування системного мікроклімату проводиться по двох параметрах: температурі зірна, яке контролюється датчиком – регулятором SK та його вологість зовнішнього повітря вологоміром В1.

Рисунок 4.11. Принципова електрична схема керування бункером Активного вентилювання зерна БВ – 25
Рисунок 4.12. Принципова електрична схема системи автоматичного контролю і роботи БВ – 25.
Принципова схема регулятора відносної вологості агента сушіння в устаткуванні для активного вентилювання зерна показана на рисунку. 4.13.
Вимірювання вологості зовнішнього повітря здійснюється за допомогою напівпровідникового вологочутливого опору - гігристора Rг.. Гігристор зашунтований опором Rш і включений до мостової схеми електронного моста, плечами якого є резистори R1...R4, а також опір реохорда Rр. Контакти SQ1—SQ3 трипозиційного пристрою моста, що настроюються на задані значення відносної вологості повітря φ1...φ3, через проміжні реле К1—К3 управляють включенням магнітних пускачів 1ЕК1—1ЕК3 трьох секцій підігрівання повітря в бункерах.
Принцип дії регулятора такий. При підвищенні відносної вологості зовнішнього повітря до значення φ1, замикається контакт SQ1 і спрацьовує реле К1, яке своїми контактами підключає до мережі живлення контактом 1КМ1 котушку магнітного пускача 1ЕК1 першої секції нагрівників. При подальшому підвищенні відносної вологості зовнішньою повітря до φ2 замикаються контакти SQ2 (при φ3— замикаються SQ3), відповідно спрацьовують контакти К2 та К3 і підключаються наступні секції нагрівників. При цьому, коли спрацьовують контакти К1 та К3 загоряються сигнальні лампочки HL1—НL3, які показують оператору кількість включених секцій. При зниженні вологості аналогічно відбувається відключення секцій підігрівання повітря.
У схемі передбачене блокування на включення секцій при невключених вентиляторах, що здійснюється блок-контактами 1КМ, відповідного магнітного пускача двигуна вентилятора. Перемикач SA1 призначений для перемикання управління секціями підігрівання з автоматичного на ручний і навпаки. Поточне значення відносної вологості повітря фіксується стрілкою електронного моста. Ця інформація дозволяє оператору своєчасно включати і відключати регулятор, оскільки він працює лише на пониження вологості.

Рисунок 4.13. Принципова схема автоматичного регулятора відносної вологості агента сушіння в бункері для активного вентилювання зерна.
ЗАПИТАННЯ
1. Як здійснюється активне вентилювання зерна? 2. Яка шкідливість зберігання волого зерна? 3. Що дає активне вентилювання зерна? 4. Яка загальна будова бункера для активного вентилювання зерна? 5. Що передбачає автоматизація бункерів активного вентилювання зерна? 6. Поясніть роботу бункера активного вентилювання зерна по технологічній схемі. 7. Поясніть роботу бункера активного вентилювання зерна по принциповій електричній схемі.
ТЕСТИ
1. Який пристрій використовується для автоматичного вимикання привода поршня заглушки бункера активного вентилювання зерна?
A. Кінцеві вимикачі
B. Датчики рівня
C. Реле вологості
2. За допомогою принципової електричної схеми бункера активного вентилювання зерна вкажіть в яких режимах працює установка
A. Ручний, автоматичний.
B. Сушка та консервація.
C. Ручний, автоматичний, сушка та консервація.
3. За допомогою принципової електричної схеми бункера активного вентилювання зерна вкажіть який датчик використовується для контролю верхнього і нижнього рівня зерна
A. Датчики рівня SL2 контролює верхній і SL1 нижній рівень зерна в бункері.
B. Датчики рівня SL1 контролює верхній рівень зерна в бункері.
C. Датчики рівня SL1 контролює верхній і SL2 нижній рівень зерна в бункері.
4. За допомогою принципової електричної схеми бункера активного вентилювання зерна вкажіть для чого використовується Датчиками вологості В1?
A. Для виміру вологості вхідного повітря, при високому за допомогою реле К1 вмикає магнітним пускачем КМ5 нагрівні елементи калорифера ЕК.
B. Для виміру вологості повітря на виході з маси зерна, при наявності вологи за допомогою реле К2 вмикається магнітний пускач КМ2 приводу вентилятора М2
C. Для виміру вологості вхідного повітря, при наявності вологи за допомогою реле К2 вмикається магнітний пускач КМ2 приводу вентилятора М2
5. За допомогою принципової електричної схеми бункера активного вентилювання зерна вкажіть для чого використовується Датчиками вологості В2?
A. Для виміру вологості вхідного повітря, при високому за допомогою реле К1 вмикає магнітним пускачем КМ5 нагрівні елементи калорифера ЕК.
B. Для виміру вологості повітря на виході з маси зерна, при наявності вологи за допомогою реле К2 вмикається магнітний пускач КМ4 приводу вентилятора М2
C. Для виміру вологості повітря на виході з маси зерна, при високому за допомогою реле К1 вмикає магнітним пускачем КМ3 нагрівні елементи калорифера ЕК.
6. За допомогою принципової електричної схеми бункера активного вентилювання зерна вкажіть для чого використовується реле часу КТ?
A. Реле часу створює затримку часу необхідну для вимикання двигуна М2 вентилятора
B. Реле часу створює затримку часу необхідну для виносу вологи з маси зерна до датчика вологості В2
C. Реле часу створює затримку часу необхідну для виносу вологи з маси зерна до датчика вологості В1
4.4. АВТОМАТИЗАЦІЯ МОБІЛЬНИХ ПРОЦЕСІВ СІЛЬСЬКОГОСПОДАРСЬКОГО ВИРОБНИЦТВА
Обсяг автоматизації. До мобільного відносять такі технологічні процеси, що виконуються безупинно пересувними машинами й агрегатами: перевезення вантажів, обробка ґрунту, посів і посадка рослин, догляд за врожаєм і збирання його. Їх виконують автомобілями, тракторами, плугами, культиваторами, сівалками, жниварками, комбайнами і т. п.
Рівень автоматизації мобільних процесів відстає від рівня автоматизації стаціонарних процесів через складність створення систем автоматики для мобільних машин. Незважаючи на складності, на тракторах і сільськогосподарських мобільних машинах широко використовуються засоби автоматики, у тому числі:
Прилади для контролю рівня палива, температури води, що охолоджує і гальмової рідини, тиску масла і частоти обертання двигунів внутрішнього згоряння;
Регулятори оборотів і потужності, температури охолоджувальної рідини й масла в системі змащення двигунів внутрішнього згоряння;
Автоматичні захисні пристрої, що охороняють робочі органи машини від поломок при зустрічі з перешкодами чи обмежувачі зусиль та значення крутного моменту на валу машини;
Автоматичні пристрої для відводу робочих органів від стовбурів дерев, стовпів, кущів для машин, що працюють у плодівництві і виноградарстві;
Тяглово-зчіпні пристрої для автоматичного приєднання і відокремлення робочих машин від тяглових;
Сигналізатори про заповнення збірних ємностей продуктом чи про забивання робочих органів матеріалом, наприклад для бункерів, шнеків і соломотрясів комбайна;
Автомати для утворення тюків сіна чи соломи в прес-підбирачах, в'язальні апарати жаток сніповязалок, що пресують механізми рулонних прес-підбирачів і багато хто інші.
Робота більшості з перерахованих пристроїв заснована на механічних чи гідромеханічних принципах із приводом від вала відбору потужності. Багато пристроїв зв'язані з технологічним рухом робочих органів і коліс агрегату.
З появою сучасних напівпровідникових засобів електроніки і мікропроцесорної техніки на мобільних машинах і агрегатах стали використовувати електричні засоби автоматики в сполученні з гідравлічними виконавчими механізмами для виміру, контролю і керування.
Розроблено і впроваджується ряд САУ, призначених для:
Водіння тракторів при оранці, посіві і посадці рослин;
Підтримки сталості глибини оранки;
Орієнтування трактора і робочих органів сівалки і культиватора при посіві і міжрядній обробці просапних культур, виноградників;
Водіння зернозбирального комбайна по краю нескошеної хлібної маси при скошуванні врожаю чи по валяннях скошеної хлібної маси при її обмолоті;
Регулювання висоти зрізу хлібної маси чи трави при збиранні;
Дотримання рівномірності висіву насіння з сівалок чи посадки розсади посадковою машиною;
Регулювання завантаження молотильних апаратів і силосозбиральних агрегатів;
Вирівнювання сільськогосподарських машин і їхніх робочих органів, що працюють на схилах.
Таким чином, мобільні машини й агрегати оснащуються засобами і системами автоматики для керування траєкторією і швидкістю руху, завантаженням робочих органів і глибиною обробки ґрунту, шириною захоплення і висотою зрізу, координатами положення робочих органів і оброблюваного матеріалу, рівномірністю висіву і подачі оброблюваного продукту в машину.
При досягненні граничних значень контрольованих параметрів чи при виникненні аварійних режимів засоби автоматики попереджають персонал або припиняють технологічний процес.
Розглянемо тільки принципи автоматизації основних технологічних процесів, виконуваних мобільною технікою. Більш детально з автоматизацією перерахованих процесів можна ознайомитися по спеціальній літературі.
Системи автоматичного водіння тракторів призначені для полегшення роботи тракториста, а в перспективі — для створення можливості одному трактористу одночасно керувати декількома тракторами, а потім для повної заміни тракториста автоматом керування рухом трактора. Звичайно тракторист, особливо при роботі на підвищених швидкостях, швидко утомлюється і не звертає уваги на малі порушення агротехнічних вимог виконання технологічного процесу, що в цілому приводить до зниження врожайності.
Розробкою пристроїв для водіння трактора інженери займаються з моменту створення перших тракторів. У Росії вперше в 1911 році О. Конджером і В. Корбеттой був запропонований «автоматично діюче кермо для орних тракторів» Найбільший розвиток одержали роботи з автоводінню тракторів в останні два десятиліття.
Для створення систем автоводіння виявилося доцільним роботу трактора розбити на три етапи: виїзд у поле і повернення в господарство, рух по робочій довжині гону, повороти наприкінці гону для заїзду на новий гін.
Дотепер не розроблені системи для автоматичного водіння тракторів на всіх трьох етапах і немає доцільності в цьому. Найбільший етап по витратах часу й обсягу виконуваної роботи зв'язаний з перебуванням трактора на гоні, тому було запропоновано кілька методів автоводіння трактора при його роботі.
Метод копіювання може бути використаний на більшості видів польових робіт: оранці, сівбі, культивації, збиранні, тобто тоді, коли агрегат повинний проходити щораз той самий шлях по рівновіддаленим один від одного траєкторіям. Перший гін прокладається трактористом при ручному керуванні трактором, а потім по борозні чи від спеціально створеній маркером борозні рухається копір, закріплений перед трактора, і видає сигнали на зміну траєкторії руху трактора відповідно до напрямку борозни.
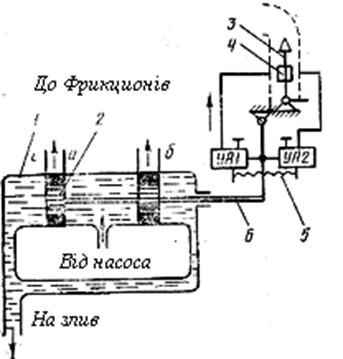
Принцип дії системи автоводіння по копіру демонструється рисунком 4.14. Копір 3 при русі трактора сковзає по дну борозни. Якщо копір відхиляється, наприклад, уліво, то замикається лівий контакт 4 і спрацьовує електромагніт УА1, що живиться від акумуляторної батареї трактора. При цьому важіль 6 пересуває поршні 2 золотники 1 теж уліво, і відкриваються його вікна а і б. Масло під тиском, створюваною гідронасосом, надходить через вікно а до лівого силового гідроциліндра, що відключає лівий фрикціон. Унаслідок цей трактор починає повертатися вліво до розмикання контактів 4, електромагніт УА1 відключається, і пружиною 5 поршні 2 золотники 1 повертаються у вихідне положення, при якому лівий і правий фрикціони трактора включені. При відхиленні копіра вправо спрацьовує електромагніт УАЗ, і тиск масла через вікно 6 діє на органи керування поворотом трактора вправо.
|
Метод копіювання простий за принципом дії, але має ряд недоліків: накопичується статична помилка керування, унаслідок цього після декількох проходів сильно викривляється маршрут руху, і тому зростають витрати енергії на безупинні повороти трактора. Крім того, копір при наїзді на місцеві перешкоди вискакує з борозни, і трактор здобуває довільний рух.
У методі програмного автоводіння траєкторія руху задається спеціальним програмним пристроєм.
Технічно здійснити програмне автоводіння дуже складно через необхідність мати високу точність дотримання траєкторії руху. Наприклад, на гоні довжиною 500 м погрішність роботи програмних пристроїв на оранці повинна бути не більше 0,02% (10 см. відхилення), а при квадратно-гніздовій посадці—0,004% (2 см), що практично недосяжно.
Отже, програмне водіння може бути тільки в комбінації з копіюванням: на довжині гону трактором керують від пристрою, що копіює, а на поворотах від програмного.
|
При дистанційному керуванні оператор керує одним чи декількома агрегатами по провідних лініях зв'язку чи радіозв'язку. Практично використовувалося дублерне водіння трактора: тракторист, крім свого трактора, керує по каналі зв'язку сусіднім. Хоча цей метод скорочує число трактористів, але ускладнює їхню роботу з одночасного керування двома тракторами.
Методи, що використовують природні і штучні орієнтири, найбільш зручні при строго заданих маршрутах руху — при виїзді тракторів з господарства на польові стани, в поверненні, вивезенні гною від ферм, доставці кормів, обробці просапних культур, садів і виноградників.
Як природні орієнтири використовують рядки рослин, краї хлібостою, валки скошеної маси, шпалерний дріт на виноградниках, магнітне поле землі і навіть планети і зірки, як при навігаційному керуванні літаками і кораблями. Штучні орієнтири спеціально створюють на оброблюваних полях, прокладають кабелі, організують місцеві радіополя, роблять мітки з добрив і т. п. Найбільше повно випробуваний метод водіння по електромагнітному полю, створюваному проводами. Для цього прокладають під ґрунтом провід і по них пропускають високочастотні струми (десятки кГц), що навколо проводу створюють електромагнітне поле, сприймане спеціальними датчиками, установленими на тракторах.
Проводу закладають на глибину до 0,7 м уздовж гону на відстані подвійної ширини захоплення робочої машини, на кінцях гону прокладають поперек гону окремий провід з електромагнітним полем іншої частоти, що служить сигналом для розвертання трактора на 180° (при човниковій обробці полю).
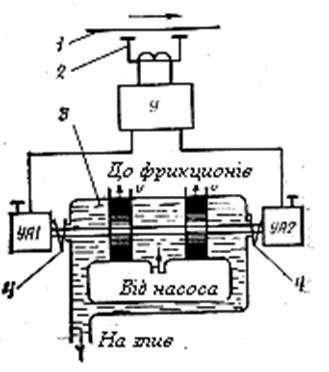
На рисунку 4.15 показаний принцип автоводіння трактора по дроту. Система автоматичного водіння створена так, що витримує визначену відстань датчика 2 від дроту 1. При зміні цієї відстані сигнал від датчика в залежності від знака відхилення надходить через підсилювач У на електромагніти УА1 чи УА2 гідравлічні золотники 3. Золотник керує гідроциліндрами бічних фрикціонів трактора аналогічно схемі на рисунку 4.14. При усуненні зазначеного відхилення поршні золотника 3 (рис. 4.15) займають вихідне положення під дією пружин 4. Через складність систем керування і ряду інших причин автоводіння поки не знайшло широкого застосування.
Системи керування робочими органами культиваторів при обробці просапних культур, бурякозбиральних комбайнів і інших машин працюють аналогічним чином. Автоматичне керування траєкторією руху сошників культиватора виключає помилкове зрізання культурних рослин. При ручному керуванні культиватором для видалення бур'янів недосвідчений тракторист може підрізати до 40% культурних рослин.
|

У подібних системах автоводіння використовують оптичні датчики чи електроконтактні щупи — дротові електроди 4 і 6 (рис. 4.16). Електроди 4 використовуються в системі автоводіння (САВ) трактора 3. Електроди 6 закріплюються на культиваторі на висоті, що відповідає висоті оброблюваної культури. При відхиленні корпуса культиватора 1 електроди стикаються з культурними рослинами в рядку 5 і утворять замкнутий електричний ланцюг через рослину, землю і робочу машину. Оскільки через великий опір (від 1 до 25 МОм) цього ланцюга струм складає частки мікроампера, то використовується підсилювач У. З підсилювача сигнал надходить на електромагніт УА1 чи УА2 у залежності від знака відхилення культиватора. Електромагніти переставляють поршні золотника 7 і відкривають вікна а і б. Масло під тиском надходить в одну порожнину силового циліндра 2 і пересуває його поршень, з'єднаний з рамою культиватора, у зворотному напрямку доти, поки не розірветься ланцюг електрод — рослина. З другої порожнини циліндра масло повертається в гідросистему.
Автоматичні системи керування глибиною оранки призначені для контролю і стабілізації глибини оранки причіпними і начіпними плугами.
Серед багатьох запропонованих методів керування глибиною практичного використання були доведені силовий, висотний і комбінований способи.
Силовий спосіб заснований на тім, що тяговий опір плуга пропорційно глибині оранки. При збільшенні чи зменшенні тягового опору спеціальна пружина, установлена між трактором і плугом, стискується чи розтискається і переміщає поршень керуючого золотника. Унаслідок цього за допомогою силового гідроциліндра відбувається виглибнення чи заглибнення лемешів плуга до заданої величини стискального зусилля. Одночасно цей спосіб дозволяє стабілізувати навантаження трактора і тримати її в межах економічної роботи трактора.
Однак силовий спосіб задовільно працює тільки на однорідних ґрунтах при постійній швидкості руху трактора, тобто коли стискальне зусилля залежить тільки від глибини ходу лемеша.
|
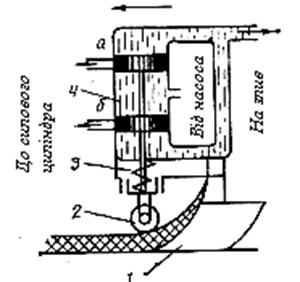
Для неоднорідних ґрунтів був запропонований висотний спосіб (рис. 4.17). Перед лемешем 1 плуга встановлюється спеціальне опорне колесо 2 яке є датчиком глибини, а органом що задає і порівнює є пружина 3. При зміні глибини оранки відбувається відкриття вікон а та б золотника 4.
Через відкриті вікна масло під тиском надходить у силовий циліндр, що регулює висоту плуга, відновлюючи глибину оранки.
Недолік висотного способу — стабілізація глибини оранки тільки того лемеша, перед яким встановлюється опорне колесо. Застосовують також комбінований спосіб, що поєднує пристрої силового і висотного способів керування. Розробляються інші способи регулювання глибини оранки.
Автоматичне керування висотою зрізу Кормових трав, кукурудзи й іншої зеленої маси на корм худобі застосовують на силосозбиральних комбайнах і сінокосарках. Висота зрізу повинна бути мінімально припустимою, що підвищує збір кормів з полів і лугів.
Для цього використовують полозковий щуп (рис. 4.18), що копіює рельєф поля. Щуп 2 до поверхні поля притискається пружиною 3. Якщо висота зрізу відповідає заданої, то вікна а і б золотника 5 закриті, а поршень силового циліндра 6 і апарат, що ріже, 1, жорстко скріплений з поршнем, знаходяться на постійній висоті від поверхні поля. При зміні рельєфу поля полозковий датчик 2 відкриває вікна а і б золотника 5, і за допомогою силового гідроциліндра 6 відбувається відновлення заданої висоти апарата, що ріже, 7. При цьому вікна золотника закриваються, оскільки щуп повертається у вихідне положення. Запобіжний пристрій 4 запобігає поломки золотника при наїзді полозкового щупа на перешкоду.
|
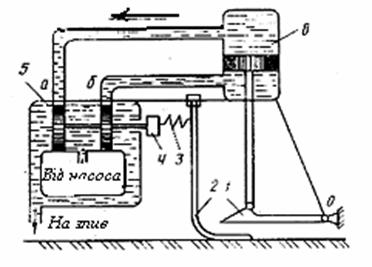
Автоматичне керування вирівнюванням кістяка зернозбирального комбайна при роботі на схилах дозволяє зберігати паралельність кістяка комбайна поверхні ґрунту і горизонтальність положення молотильного барабана й очисних пристроїв. Вручну ці операції виконувати дуже складно, тому що кут нахилу поверхні горбкуватої і гірської місцевості міняється безупинно.
При роботі комбайна без системи автоматичного керування кістяком на поперечних схилах з кутом ухилу більш 8° маса, що переробляється, збирається на похилій стороні комбайна, унаслідок цього порушується технологічний процес обмолоту зерна: збільшується до 20...30% невимолот, до 30% — пошкоджуваність зерна і має місце забивання молотильних барабанів хлібною масою. Для вирівнювання корпус гірського комбайна встановлюють на параллелограмній ходовій частини 4 (рис. 4.19) і комбайн обладнають гідросистемою керування. При нахилі корпуса 1 комбайна, наприклад, вліво вантажний маятник 3 також відхиляється вліво і відкриває вікна а і б золотника 6. Масло під тиском надходить у вікно а і діє на поршень силового гідроциліндра 5. Оскільки цей поршень закріплений жорстко з ходовою частиною комбайна, то повертається кістяк комбайна по годинній стрілці відповідно осі його кріплення. Коли корпус займає горизонтальне положення, поршні золотника під дією маятника перекривають вікна золотника і жорстко фіксують положення гідроциліндра. Пристрої, що демпфірують, 2 призначені для виключення помилкових спрацьовувань системи при поштовхах і короткочасному відхиленні кістяка від горизонтального положення.
|

Автоматичне керування оптимальним завантаженням молотарки зернозбирального комбайна здійснюється регулюванням швидкості пересування комбайна за допомогою зміни передаточного числа варіатора 2, що передає обертаючий момент від вала двигуна 1 комбайна на привод коліс 3 (рис. 4.20).
|
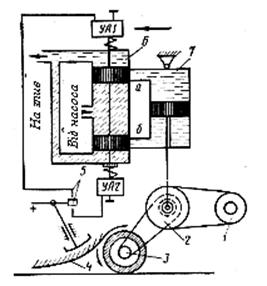
Наприклад, при збільшенні товщини хлібної маси на кістяку 4 полозковий датчик товщини маси замикає верхні контакти 5, і включається електромагніт УА1, що пересуває поршень золотника і відкриває вікна а і б. Масло під тиском через вікно а надходить у гідроциліндр 7 і пересуває поршень силового циліндра вниз. У результаті цього у варіатора 2 збільшується передаточне число, комбайн знижує швидкість руху, і, отже, зменшується подача хлібної маси в молотильний барабан. При цьому розмикаються контакти 5, а поршні золотника б під дією пружини закривають вікна А і Б.
Маються інші схеми регулювання завантаження молотильного барабана, наприклад, по виміру крутного моменту на його валу, а також по вимірі товщини хлібної маси під ланцюгами похилого транспортера жниварки. САУ завантаженням молотильного барабана забезпечує зменшення втрат зерна і краща якість обмолоту.
|
|
|
|
|
|
|
|
|
|
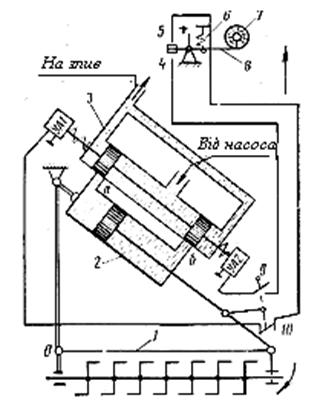
Автоматичний пристрій для керування фрезою використовується при обробці пристовбурних смуг у садах для відводу фрези від стовбурів дерев чи кущів. Відвід фрези 1 здійснює силовий гідроциліндр 2 при зіткненні щупа 8 з деревом чи кущем 7 (рис. 4.21). Щуп повертається по годинній стрілці і замикає контакти 5. У результаті цього спрацьовує електромагніт УА 2, що відкриває вікна А і Б золотника 3. Масло під тиском надходить через вікна у верхню порожнину циліндра 2 і штоком поршня повертає фрезу 1 по годинній стрілці доти, поки не розімкнеться в крайнім положенні кінцевий вимикач 10 і замкнеться 9.
При цьому електромагніт УА1 відключається, і вікна золотника 3 закриваються поршнями під дією пружин, фіксуючи фрезу у відведеному стані. Після обходу фрезою перешкоди щуп 8 під дією пружини 6 повертається у вихідний стан і замикає контакти 4, що приводить до спрацьовування електромагніта УАЗ і відкриттю вікон а і б золотника. При цьому масло надходить через вікно б у нижню порожнину гідроциліндра 2, а фреза займає робоче положення, при якому розмикається кінцевий вимикач 9 і вікна золотника перекриваються його поршнями.
В умовах паливно-енергетичної кризи перспективним є застосування електропривода мотоблоків, що використовуються на присадибних ділянках та у фермерських господарствах. Інтенсивний пошук оптимальних рішень у цьому на прямі ведеться в науково-дослідних установах України.
Широке впровадження на зернотоках одержали самопересувні машини для післязбиральної обробки зерна: зернозавантажувачі, протравлювачі, зерноочисні машини. Електроенергію до них підводять гнучким кабелем, прокладеним по поверхні току.
Насіннєочисна машина СМ-4 призначена для вторинного очищення зерна і сортування насіння різних культур. Робочі органи машини — завантажувальний скребковий транспортер із шнековими живильниками, два вентилятори, решітний стан, двопотокова норія, трієрний блок і механізм самопересування — приводяться в рух від двох асинхронних електродвигунів.
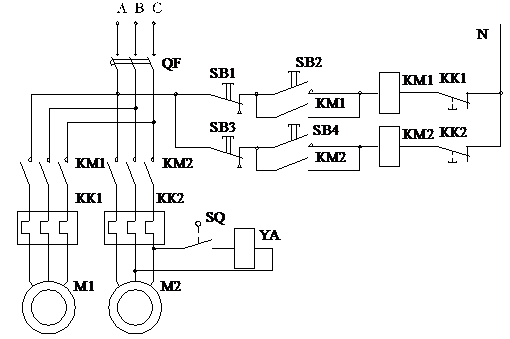
Рисунок 4.22. Принципова електрична схема керування насіннєочисною машиною СМ-4.
Механізмом самопересування машина переміщується вздовж бурта при роботі та від бурта до бурта без допоміжних транспортних засобів. Механізм самопересування складається з храпового механізму, відкритого циліндричного редуктора, ланцюгових передач на ходові колеса і вала керування кулачковими муфтами.
При роботі машини обертовий момент від електродвигуна М на ходові колеса передається через храповий механізм 5, машина рухається на малій швидкості. Для переїзду від одного робочого місця до іншого з більшою швидкістю замикають півмуфту 11.
Електродвигуни привода робочих органів машини вмикають натисканням кнопок SB2 і SВ4 (рис. 4.22). Для захисту від коротких замикань встановлено автоматичний вимикач QF. Захист електродвигунів від перевантажень здійснюють теплові реле КК1 і КК2.
Ступінь завантаження машини регулюється автоматично шляхом вмикання і вимикання механізму самопересування. Для цього живильний пристрій, що складається з розподільного шнека 1 (рис. 4.23), рухомої перегородки 2 і підпружиненого клапана-живильника 3, обладнано вимикаючим упором 8 і кінцевим вимикачем 4. При переповненні кожуха розподільного шнека клапан 3 відтискується зерном, що подається на очищення, і через упор 8 діє на кінцевий вимикач 4 (SQ, див. рис. 4.23). Останній вмикає електромагніт 5 (YА, див. рис. 4.23), встановлений на механізмі самопересування, який піднімає заскочку 6 храпового колеса 7. Механізм самопересування вимикається, і подача зерна на очищення зменшується.
|
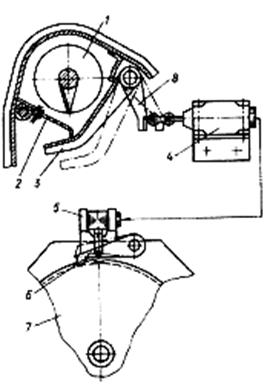
Широко застосовується метод контролю завантаження робочих органів збиральних машин, який грунтується на контролі частоти обертання робочих валів. При перевантаженні будь-якого органу машини його вал зменшує частоту обертання. На індикації частоти обертання і створюються системи контролю завантаження робочих органів сільськогосподарських машин.
Останнім часом розроблений і виготовляється цілий клас таких систем. Крім контролю частоти обертання, вони контролюють втрати продукції, рівень її в бункерах тощо.
Розглянемо конструкцію та роботу такої системи контролю на прикладі УСАК-13. Система призначена для автоматичного контролю частоти обертання 13 робочих органів самохідної коренезбиральної машини КС-6 та подачі світлової та звукової сигналізації при зниженні частоти обертання у тому чи іншому вузлі з визначенням його місце знаходження. За допомогою сигнальних ламп контролюють приводи копачів (з 1 по 6 датчик), шнеку (датчик 7), бітерів копачів (датчик 8), передавального вала (датчик 9), поздовжнього транспортера (датчик 10), завантажувального елеватора (датчик 11), стрічкового транспортера (датчик 12), грудкоподрібніювача (датчик 13). Система УСАК-13 складається з 14 датчиків (один запасний), блока управління, а також 14 кабелів для під'єднання датчиків до блока.
Блок управління призначений для сприймання сигналів від датчиків, їх аналізу та формування сигналу на індикаторах. До блока приєднують всі елементи і вузли системи. На його передній панелі розміщені клеми для підключення живлення від електрообладнання комбайна, клема підключення звукового сигналу, штепсельний роз’єм «Індикатор» для підключення індикатора та «Датчик» — Датчиків, перемикач «К—І»—для перевірки справності системи, два запобіжники: «2А»—для кола живлення і «5А»—для кола звукового сигналу. Зверху блока знаходиться кришка, яка закриває місце перемикача «Датчик» для встановлення кількості підключених до системи датчиків, і перемикач «Оберти», за допомогою якого встановлюють режим роботи системи контролю.
Індикатор системи призначений для розміщення органів управління та індикаторів візуальної сигналізації аварійного стану вузлів, які підлягають контролю.
Індикатор виконаний у вигляді малогабаритного блока. На його передній панелі встановлені вимикачі живлення системи «ВКЛ» та звукового сигналу «ГУДОК», індикаторна лампа наявності живлення та 13 сигнальних ламп. На задній панелі змонтоване штепсельне розняття для підключення кабелю від блоку управління.
Датчик системи здійснює перетворення механічного руху обертання у послідовність електричних імпульсів. Це електромагніт з двома обмотками, розміщеними у стальному циліндричному корпусі, і магнітним шунтом на валу, який контролюють. Одну з обмоток використовують для створення електромагніту, а другу електричних сигналів. У корпусі датчика знаходиться фланець для встановлення датчика на вузлі. Перетворення механічного руху в електричні сигнали здійснюється за допомогою магнітних шунтів, виконаних з урахуванням конструкції й частоти обертання робочих валів.
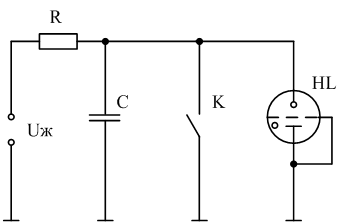
Рисунок 4.24. Спрощена принципова схема обладнання контролю УСАК: С — конденсатор; К — електронний ключ; R - резистор; HL - тиратрон
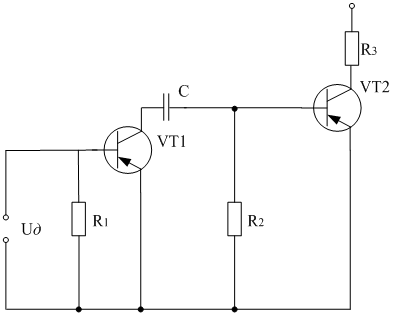
Рисунок 4.25. Принципова електрична схема електронного ключа обладнання контролю УСАК: R1…R3 - резистори; С - конденсатор; VT1, VT2 — транзистори; UД — сигнал від датчика.
На рис 4.24. зображена електрична схема системи контролю, яка складається з конденсатора С, електронного ключа К і порогового елемента НL. Зарядження конденсатора здійснюється за рахунок постійної напруги UЖ на резисторі R. Електронний ключ спрацьовує в такт з імпульсом, який надходить від датчика. Пороговий елемент спрацьовує, якщо напруга на конденсаторі досягає граничного значення UГр. Для реалізації порогового елемента використовують тиратрони типу МХТ-80 в діодному підключенні або світлодіоди.
Принцип дії системи такий. Імпульси від датчика надходить на електронний ключ К, замикають його і в цей час через ключ розряджається конденсатор С. Заряджається він при розімкненому К до напруги UГр за час Тгр. Якщо період між двома імпульсами менший за Тгр, то конденсатор не встигає зарядитись до напруги UГр і пороговий елемент не спрацьовує. При зниженні частоти обертання робочого вала під дією перевантаження імпульси від датчика будуть надходити через більший проміжок часу. Якщо період буде більший Тгр, напруга па конденсаторі С встигає досягти UГр, що призведе до спрацювання порогового елемента. При цьому конденсатор буде розряджатись через тиратрон HL. Світлова індикація проявляється у вигляді періодів загоряння тиратрона.
Ключ К складається з двох каскадів, виконаних на транзисторах VT1 та VT2 (рис 4.25). Перший каскад підсилює імпульси, які надходять від датчика, до рівня спрацювання другого каскаду. При відкриванні транзистора VT2 через нього розряджається конденсатор С.
Для перевірки стану основних блоків УСАК у процесі роботи застосовують блок самоконтролю, який складається з генератора, що виробляє імпульси з частотою вищою ніж частота імпульсів від датчиків. При подачі напруги з такою частотою на виході всіх каналів повинні з'явитись сигнали «відсутність відхилень», що свідчить про нормальну роботу системи.
Важливими системами контролю за правильним виконанням технологічних операцій є системи контролю висіву: «КЕДР», УСК, ХА та ін. У сівалках часто порушується нормальна робота механізмів: забиваються грунтом сошники, потрапляють сторонні предмети у висівні апарати тощо. Всі ці недоліки призводять до нерівномірності висівання зерна, що істотно знижує врожайність. Контроль за роботою сівалок дозволяє водію приділяти основну увагу водінню агрегату, забезпечуючи прямолінійність рядків та задане стикування міжрядь.
Систему «КЕДР» встановлюють на сівалках СУПН. Живиться вона від бортової електричної мережі трактора, з яким агрегатується сівалка і складається з восьми датчиків контролю висіву насіння та двох—рівня насіння, блоків підсилювання та індикації і з'єднувальних кабелів. Датчики контролю висіву насіння — це П-подібний корпус, де знаходяться освітлювальна лампа, фотодатчик та електричний підсилювач (рис. 4.26). При подачі живлення лампа HL освітлює фотодіод BL, який є чутливим елементом. Насіння, яке висівається, перетинає світловий промінь між лампою та фотодіодом, що спричиняє зміну фотоструму. Фотодіод через конденсатор С1, підключений до двокаскадного транзисторного підсилювача (транзистори VTI і VT2). При зміні фотоструму на виході підсилювача виникають електричні імпульси.
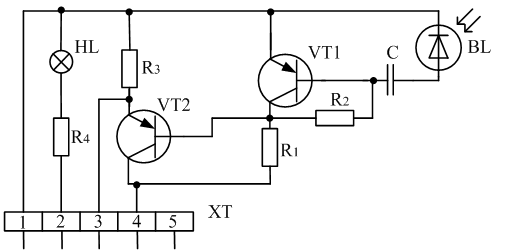
Рисунок 4.26. Принципова схема датчика контролю висіву насіння системи «КЕДР»: BL — фотодіод; VT1 і VT2 — транзистори; R1…R4 - резистори, С - конденсатор; hl - лампа; XT – розняття
Датчик контролю наявності зерна в бункері (рис. 4.27) теж має П-подібний корпус, де знаходяться лампа, фото та баластний резистори. При подачі напруги живлення лампа HL освітлює фоторезистор BL. У цьому випадку його опір становить десятки кілоом і струм на виході фоторезистора є сигналом датчика рівня про відсутність зерна у бункері. Якщо фоторезистор знаходиться в шарі насіння, то його опір досягає десятків мегаом і на виході сигнал відсутній.
|
 .
.
Сигнали від датчиків надходять у блок підсилювачів, до якого підключаються датчики та пульт управління. Крім підсилювачів, у блоці знаходиться дешифратор — діодна матриця, що складається з восьми груп діодів. За її допомогою вихідні сигнали з кожного підсилювача перетворюються у сигнали для появи відповідної цифри на пульті управління і вмикання звукового сигналу.
Пульт управління є металевим корпусом, в середині якого на друкованій платі змонтовані генератори світлових та звукових імпульсів, підсилювачі та засоби індикації. Па лицьовій панелі розміщені декоративна решітка головки гучномовця, індикатори «Вмик» та «Рівень», тумблер вмикання живлення, цифрове табло номера місця відмови, кнопка вмикання режиму «Перевірка».
Аналізуючи досвід розвитку автоматизації процесів у рільництві за кордоном та в Україні, можна зробити висновок, що в основному рівень автоматизації мобільних агрегатів буде підвищуватись шляхом удосконалення існуючих систем автоматичного контролю і захисту, розробки систем автоматичного управління на новій елементній базі, створення нових систем на збиральних машинах, які зможуть визначати якість збирання врожаю.
Сучасні системи автоматичного контролю та захисту удосконалюються за рахунок збільшення інформації про технологічний процес, підвищення надійності роботи систем, їх уніфікації та універсалізації.
Спеціалізовані системи автоматичного контролю виконують на різних агрегатах майже однакові функції, а відрізняються технічними рішеннями та елементною базою. Універсальні системи позбавлені цих недоліків.
Сучасні системи автоматичного управління мобільними агрегатами розробляються з урахуванням нового обладнання, за допомогою якого можливе управління всіма процесами. Так один управляючий пристрій може керувати водінням агрегату, роботою двигуна і правильним виконанням технологічних операцій. Таким пристроєм може бути тільки бортова електронно - обчислювальна машина (БЕОМ). Вже зараз розробляються та проходять випробування універсальні управляючі пристрої на основі мікро-ЕОМ, які керують процесами підготовки ґрунту, висіву, догляду за рослинами та збирання врожаю. При цьому до одного і того ж управляючого пристрою під'єднують нові пристрої для подання інформації про параметри того чи іншого технологічного процесу.
Ефективним напрямком удосконалення управління збиральних машин є оснащення їх пристроями, які можуть розпізнавати збирану продукцію. Останнім часом створено обладнання для відокремлення картоплі від грудок та каміння з використанням рентгенівських променів. Розробляють системи, які відрізняють достиглий салат від недостиглого на основі жорстких гама-променів. За допомогою довгохвильового електромагнітного випромінювання роблять спроби розпізнати колір овочевих культур.
ЗАПИТАННЯ
1. Які Технологічні процеси відносять до мобільних? 2. Які засоби автоматики використовують в сільськогосподарських мобільних машинах? 3. Для чого оснащуються мобільні машини й агрегати засобами і системами автоматики? 4. Як здійснюється Автоматичне водіння трактора мЕтодом копіювання? 5. Як здійснюється Автоматичне водіння трактора мЕтодом Дистанційного керування? 6. Як здійснюються способи автоматичної системи керування глибиною оранки? 7. Як здійснюється автоматичне керування висотою зрізу кормових трав, кукурудзи й іншої зеленої маси? 8. Як Здійснюється автоматичне керування оптимальним завантаженням молотарки зернозбирального комбайна? 9. Які пристрої використовуються для автоматичного вмикання і вимикання механізму самопересування насіннєочисної машини СМ-4? 10. Для чого призначена системи контролю УСАК-13? 11. З чого складається система «КЕДР» що встановлюють на сівалках СУПН? 12. Як працює датчики контролю висіву насіння системи «КЕДР»? 13. Які перспективи автоматизації мобільних агрегатів? 14. Що може виконувати бортова електронно - обчислювальна машина (БЕОМ)?
ТЕСТИ
1. Що виконують Засоби автоматики при досягненні граничних значень контрольованих параметрів?
A. При виникненні аварійних режимів засоби автоматики припиняють технологічний процес.
B. При виникненні аварійних режимів засоби автоматики попереджають персонал
C. При виникненні аварійних режимів засоби автоматики попереджають персонал або припиняють технологічний процес.
2. Для чого Призначені системи автоматичного водіння тракторів?
A. Для полегшення роботи тракториста та створення можливості одному трактористу одночасно керувати декількома тракторами.
B. Для полегшення роботи тракториста та повної заміни тракториста автоматом керування рухом трактора
C. Для полегшення роботи тракториста та створення можливості одному трактористу одночасно керувати декількома тракторами, а потім для повної заміни тракториста автоматом керування рухом трактора
3. Які пристрої використовують в системах Автоводіння?
A. Використовують оптичні датчики
B. Використовують оптичні датчики чи електроконтактні щупи — дротові електроди
C. Використовують електроконтактні щупи — дротові електроди
4. Для чого призначені автоматичні системи керування глибиною оранки?
A. Для контролю і стабілізації глибини оранки причіпними і начіпними плугами
B. Для контролю глибини оранки причіпними плугами
C. Для стабілізації глибини оранки начіпними плугами
5. Як здійснюється автоматичне Керування фрезою в садах
A. Відвід фрези здійснює силовий гідроциліндр при зіткненні щупа з деревом чи кущем
B. Відвід фрези здійснює силовий гідроциліндр.
C. Відвід фрези здійснює силовий гідроциліндр при зіткненні щупа з деревом
6. Для чого призначена насіннєочисна машина СМ-4
A. Для сортування насіння різних культур
B. Для вторинного очищення зерна і сортування насіння різних культур
C. Для вторинного очищення зерна
7. З чого складається система УСАК-13?
A. З 14 датчиків (один запасний), блока управління.
B. З 14 датчиків (один запасний), блока управління, а також 14 кабелів для під'єднання датчиків до блока
C. З 14 кабелів для під'єднання датчиків до блока
8. Для чого призначений блок управління система УСАК-13?
A. Для розміщення органів управління та індикаторів візуальної сигналізації аварійного стану вузлів, які підлягають контролю
B. Для аналізу та формування сигналу на індикаторах
C. Для сприймання сигналів від датчиків, їх аналізу та формування сигналу на індикаторах
РОЗДІЛ 5. АВТОМАТИЗАЦІЯ ТЕХНОЛОГІЧНИХ ПРОЦЕСІВ В ЗАХИЩЕНОМУ ГРУНТІ
5.1. АВТОМАТИЗАЦІЯ ОБІГРІВАННЯ ПАРНИКІВ ТА ТЕПЛИЦЬ
5.1.1. Види споруд закритого ґрунту
Споруди закритого ґрунту поділяються на утеплений грунт, парники і теплиці.
Утеплений грунт — це земельні ділянки, що можуть обігріватися чи не обігріватися, призначені для вирощування розсади і ранніх овочів.
Грунт, що не обігрівається, має малогабаритні плівкові покриття або переносні покриття з матів, ряднини, плівок, які використовуються для захисту городини вночі чи в період різких похолодань. Єдиним джерелом тепла є сонячна енергія.
Для грунту, що обігрівається, джерелом тепла може бути сонячна енергія, біопаливо (свіжий гній, рослинні відходи), а також гаряча вода й електрична енергія.
Парники - це повністю або частково заглиблені в грунт каркасні споруди невеликої площі з прозорим покриттям. Парники призначені для вирощування розсади для відкритого грунту і отримання ранніх овочів. Парники глибиною 0.4...0,8 м, шириною 1,4 м будь-якої довжини виготовляють з дерева або бетону і закривають скляними і плівковими рамами, а на ніч і під час похолодань - додатково солом’яними матами товщиною 5—6 см. Грунт у парниках обігрівається сонячною енергією, біопаливом, гарячою водою або електроенергією. Останній спосіб найбільш зручний для автоматизації.
Теплиці - це найдосконаліший і технічно оснащений вид споруд закритого грунту. Теплиці, що входять до складу тепличних комбінатів або експлуатуються як окремі споруди, згідно з агротехнічними вимогами поділяють за призначенням (овочеві, квіткові, розсадні, розсадно - овочеві), періодом експлуатації (зимові, весняні), способом вирощування (ґрунтові й субстратні).
Теплиці класифікують також за конструкційними ознаками на одноланкові (ангарні) і багатоланкові (блочні), матеріалом покриття— скляні, плівкові та склопластикові. Вони можуть бути одно - або багатоповерховими (баштового типу), як з прозорим огородженням, так і непрозорі. За конструкцією даху теплиці поділяють на односкатні, двоскатні, нерівноскатні, аркові.
Будівельні конструкції теплиць визначають з урахуванням впливу зовнішніх кліматичних факторів: найнижчої середньодобової температури, вітрового і снігового навантаження (добова маса снігового покриву), а також сейсмічної активності в районі будівництва. На даний час розроблені типові проекти тепличних комбінатів, призначених для різних кліматичних зон.
5.1.2. Агротехнічні вимоги до автоматизації технологічних процесів у закритому грунті
Норми технологічного проектування споруд закритого грунту (НТП—СХ) передбачають: автоматичне регулювання температури і вологості повітря; температури води в системі підґрунтового обігрівання; температури поливної води і розчинів мінеральних добрив; концентрації добрив у розчині та вуглекислоти в повітрі; автоматизацію процесів поливу, підживлення і досвічування рослин; закриття вентиляційних фрамуг при швидкості вітру понад 10 м/с.
Для кожного виду рослин характерні свої оптимальні режимні параметри та допустимі відхилення від оптимальних.
Тепловий режим культиваційних споруд підтримується за допомогою автоматичних систем обігрівання і вентиляції. Він визначається потужністю джерел тепла, а також конструктивними особливостями споруд. Точність підтримання заданої температури—в межах ±1°С. Крім того, задана температура повинна узгоджуватись з рівнем освітленості, що пов'язане з фізіологічними особливостями життєдіяльності рослин. Технологічні норми також регламентують максимальну температуру 30 °С (для розсади 26°С) мінімальну— 15 °С (не більше доби).
Водний режим забезпечується підтриманням необхідної вологості повітря і грунту за допомогою різних систем зрошення (надґрунтове, підґрунтове, крапельне зрошення). Витрати води становлять від 5 до 15 л/м2 на добу. Оскільки зрошення може порушувати тепловий режим у споруді, температуру поливної води підтримується на рівні температури повітря і грунту (в межах 20—25 °С).
Режим живлення забезпечується підтриманням необхідної концентрації мінеральних добрив, їх співвідношенням і рН грунту або субстрату. Технологія передбачає регулювання загальної концентрації з точністю ±10% і рН з точністю ±0,1 в достатньо вузькому діапазоні, який визначається технологічним регламентом для кожного виду рослин і змінюється залежно від фази розвитку.
Газовий режим в об'ємі споруди закритого грунту передбачає контроль і підтримання концентрації вуглекислоти на рівні 0,1—0,35%. Регулювання концентрації здійснюється на рівні освітленості більше 5 клк. При цьому повітряний обмін з навколишнім середовищем припиняється шляхом закриття вентиляційних фрамуг. Для інтенсифікації процесів життєдіяльності рослин швидкість повітряних потоків повина становити 0,15 м/с.
Світловий режим, як правило не регулюється. Лише при вирощуванні розсади і в селекційних спорудах використовують штучне освітлення. Питома потужність опромінювачів згідно з технологічними нормами знаходиться в межах100 -300 Вт/м2.
Урахування всієї різноманітності взаємозв'язків між режимними параметрами, їх узгодження та оптимізація погребують високого рівня автоматизації технологічних процесів.
5.1.3. Обсяг механізації й автоматизації технологічних процесів у теплицях
Тепличне господарство — найбільш трудомістка галузь рослинництва з щорічними витратами до 10...18 год. на 1 м2 площі. Рослини добре розвиваються і плодоносять тільки при оптимальних значеннях параметрів мікроклімату теплиць. Теплиці мають високий ступінь механізації й автоматизації технологічних процесів.
Близько 40% від загальних витрат праці витрачається на підготовчі роботи, що виконують за допомогою машин: готування ґрунтових сумішей, заміна ґрунту, стерилізація ґрунту передпосівна її обробка, дезінфекція конструкцій теплиць, поточний ремонт, передпосівна обробка насіння, виготовлення живильних кубиків, передпосівне внесення добрив і т. д. У процесі вирощування і збору врожаю засоби механізації й автоматизації використовують при посіві насіння і доглядом за розсадою, поливі і підживлені рослин, запиленні рослин і їхньому захисту від хвороб, зборі і транспортуванні овочів і рослинних залишків, а також для керування параметрами мікроклімату.
Для механізації підготовчих робіт використовують як спеціальні, так і сільськогосподарські і будівельні машини загального призначення. Дерен для ґрунтових сумішей розкривають тракторним плугом, згрібають бульдозером, завантажують на транспортні засоби бульдозером чи екскаватором. Аналогічним чином здійснюється механізована доставка гною, сипучих матеріалів і мінеральних добрив. При закладанні ґрунтових сумішей і їхньому переміщенню застосовують різні екскаватори, бульдозери, навантажувачі і спеціальні машини для готування ґрунтових сумішей, наприклад СТМ-8/20. При зміні і відновленні ґрунтів використовують цю же техніку.
У захищеному ґрунті ґрунт рихлять на глибину 10...12 см. перед кожним посівом, тобто кілька разів у році, а перед пропарюванням і при закладенні гною ґрунт рихлять на глибину не менш 22 см. з оборотом шару. Для цього використовують, якщо дозволяють конструкції культиваційних споруджень, грунтопереробні машини загального призначення, а також спеціальні ротаційні плуги і самохідні електрофрези ФС-0.7А чи МПТ-1,2. Для міжрядної обробки ґрунту в теплицях у безпосередній близькості від рослин і суцільної обробки ґрунту в парниках використовують ручні електромотиги.
У малих теплицях грунтосуміші при сильному зараженні їхніми хворобами і шкідниками змінюють раз у 2...4 роки, а в тепличних комбінатах щорічно дезінфікують і потім промивають грунтосуміші без їхньої заміни. З багатьох способів дезінфекції найбільш ефективне пропарювання. При цьому ґрунт покривають термостійкою плівкою і підводять під неї пару температурою 110...120°С при тиску до 50 кПа. Витрата пари 45...50 кг на 1 м2, тривалість пропарювання 8...10 ч. Після пропарювання грунтосуміші для зменшення концентрації солей промивають дощуванням у 3...5 прийомів із загальною витратою води до 200...400 л/м2.
Для боротьби зі шкідниками і хворобами використовують також хімічні методи протравляння насіння, обробку конструкцій споруджень і обприскування рослин. Вартість обробки ґрунту ядохімікатами складає 20...70% від парового, але в ґрунт заносять токсичні речовини. Торфоперегнійні живильні кубики (горшочки) виготовляють на спеціальних верстатах конвеєрного типу. Верстат — простий по будові. Він складається з бункера, конвеєра і штампа з електроприводом. Принцип роботи наступний: при підйомі штампа стрічка конвеєра завантажується з бункера рівним шаром торфоперегнійної маси і переміщається під штамп. Коли штамп йде вниз, стрічка зупиняється, відбувається пресування і нарізка кількох сотень кубиків розміром до 100Х100 мм.
У захищеному ґрунті повинний бути точний висів, завдяки чому заощаджується до 40% дорогих насіння овочевих культур і знижуються витрати на наступне проріджування.
Для посіву застосовують спеціальні парникові сівалки. Лунки для розсади в ґрунті і її посадці поки роблять вручну.
Полив і підгодівлю рослин мінеральними добривами у великих тепличних комбінатах здійснюють через стаціонарну систему дощування автоматично відповідно до заданої програми. У малих теплицях і парниках для цього використовують пересувні насосні станції.
При підв'язці рослин до шпалер, обрізку пагонів і листя, збиранню і перевезенню врожаю застосовують пересувні платформи, драбини і ручні візки. Для перевезення готової продукції й устаткування застосовують електрокари і самохідні шасі, які постачаються для полегшення праці тепличними спеціальними піддонами і підйомниками. Для перевезення розсади з блоку в блок теплиць по відкритому холодному повітрі застосовують криті фургони.
Автоматизація технологічних операцій у захищеному ґрунті дає істотний ефект: збільшується продуктивність і поліпшуються умови праці, заощаджується паливо й електроенергія, знижується захворюваність посадкового матеріалу і дорослих рослин, підвищується врожайність і скорочуються терміни дозрівання рослин і овочів. Умови праці і побуту робітників на автоматизованих тепличних комплексах не гірше, а іноді краще, ніж на промислових підприємствах.
У малих теплицях і парниках рівень автоматизації по контролі і керуванню мікрокліматом поки невисокий і обмежується в основному одним параметром — температурою.
На тепличних комплексах промислового типу автоматичні контроль і керування використовують практично для багатьох параметрів, а саме: температури і вологості ґрунту і повітря, змісту вуглекислого газу, ступеня освітленості, температури води для поливу ґрунту, зволоження повітря, вентиляції і швидкості переміщення повітря в теплиці, концентрації розчинів мінеральних добрив ґрунту, режимів живлення стелажів гідропонних теплиць, значення рН і інших параметрів. Для вибору оптимального режиму відповідно до зовнішніх погодних умов передбачене автоматичне спостереження за ними і зміна внутрішніх параметрів мікроклімату. Також засоби автоматики широко використовуються на допоміжних установках тепло - і енергопостачання, постачання водою і т. п.
5.1.4. Автоматизація обігріву парників
В парниках вирощують розсаду для відкритого ґрунту і ранньоспілі овочі у весняний період. По технічному оснащенню і рівні механізації й автоматизації технологічних процесом вони займають проміжне місце між утепленим ґрунтом і аграрними теплицями.
Найпростіші парники обігрівають біопаливом, широке розповсюдження одержав обігрів гарячою водою і за допомогою електроенергії. Іноді сполучать водяний обігрів з електричним, котрий включається у період різких похолоданні і заморозків.
Унаслідок короткого терміну вигонки розсади і високої її щільності посадки (на 1 м2 кілька сотень штук) економічно завжди ефективно використовувати для обігріву електричну енергію. Для обігріву використовують трубчасті й оголені нагрівальні елементи з питомою потужністю 100...200 Вт/м2.
Розглянемо приклади автоматичного керування температурою за допомогою електричного обігріву.
Автоматизація обігріву парників і утепленого ґрунту як досить простих споруд захищеного ґрунту зводиться до автоматичного керування температурою ґрунту і повітря в залежності від погодних умов, виду і віку рослин.
Керування тепловим режимом може бути ручним (неавтоматизованим): переключення нагрівальних елементів на різні напруги, включення окремих груп нагрівачів і т. п. Однак автоматичне керування температурою в парниках куди важливіше: тільки витрати електроенергії в порівняно з ручним керуванням скорочуються на 15...20%.
Найпоширеніший спосіб автоматичного керування температурою в парниках заснований на принципі періодичного включення і відключення нагрівальних елементів за допомогою магнітних пускачів у залежності від температури всередині парника. Електрична схема керування режимом роботи нагрівальних елементів для однієї групи, що складається з чотирьох парників, показана на рисунку 5.1. Нагрівальні елементи переводять з однієї напруги живлення на іншу (220 чи 380 В) перемикачами SA1 і SA2. Ручний режим задають, ставлячи тумблер SA3 у положення Р, автоматичний - у положення А, відключеному стану нагрівачів відповідає положення О. Для автоматичного керування тепловим режимом у повітряному просторі одного з 4...6 послідовно з'єднаних парників встановлюють датчик температури ВК.
У парниках тільки з ґрунтовим обігрівом на групу парників ставлять один датчик температури ґрунту. Його поглиблюють у ґрунт парника на глибину близько 0,1 м. Перемикачем SA1 включають нагрівальні елементи для обігріву повітря, а перемикачем SA2 — елементи обігріву ґрунту.
|
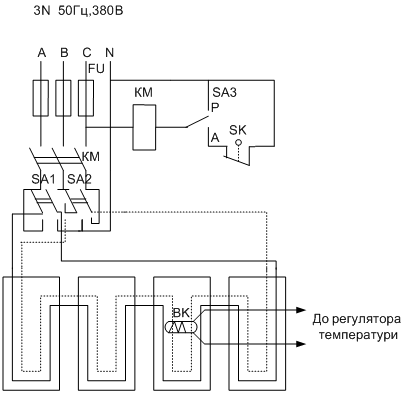
При низькій температурі регулятор температури в автоматичному режимі роботи контактами SK включає магнітний пускач КМ одночасно з подачею напруги 380/220 В. В міру підвищення температури до заданої контакти SK розмикаються, і пускач КМ відключає нагрівальні елементи.
Електротехнічною промисловістю розроблено для парників комплектне устаткування типу КП-1. Воно призначено для автоматичного керування температурою повітря і ґрунту в парниках на 1920 рам із ґрунтовим і повітряним електрообігріванням. Воно ж може застосовуватися для керування температурою ґрунту і повітря в плівкових теплицях площею до 0,5 га. Електрообігрівання здійснюється від паралельно з'єднаних шести рядів сталевого неізольованого проводу діаметром 6 мм, покладеного на глибині не менш 0,25 м у парнику з відстанню між проводами 0,25 м. Для обігріву повітря нагрівальні проводи монтують на внутрішніх бічних стінках парника.
Датчики встановлюють в одному з парників, розташованому в центрі кожної ділянки, що складає з 240 рам: у ґрунті на глибині 0,1 м — датчик температури ґрунту, а на бічній стінці парника — датчик температури повітря.
Електрообігрівні елементи поєднують у 4 групи по 480 рам і підключають до трансформатора типу ТМОБ-63. Для живлення чотирьох таких трансформаторів встановлюють електричну підстанцію потужністю не менш 250 кВА.
Понижуючі трансформатори в режимі розігріву парника включають за схемою «зірка-зірка», а в режимі обігріву— за схемою «зірка-трикутник». Трифазна лінійна напруга на вторинній стороні можна встановлювати переключенням відгалужень трансформатора: у першому режимі 125, 103 і 85 В, а в другому — 70, 60 і 49 В.
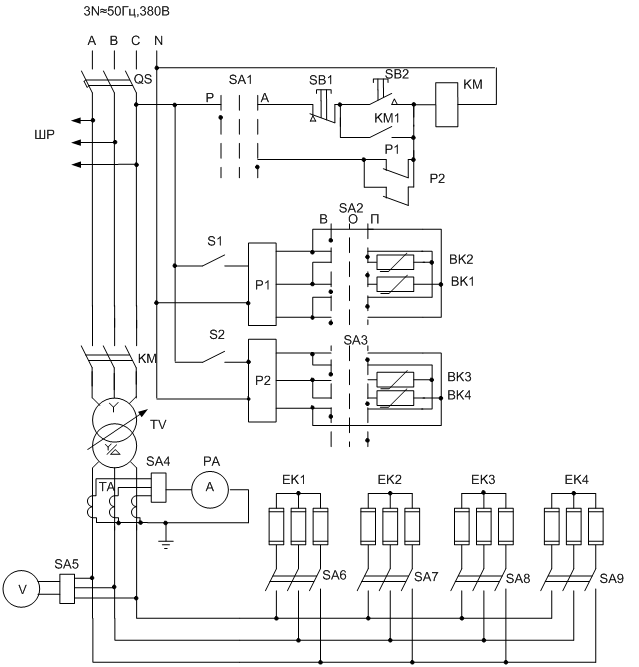
Рисунок 5.2. Принципова електрична схема комплекту устаткування типу КП-1.
Розглянемо роботу принципової схеми комплекту обладнання для одного понижуючого трансформатора (рис. 5.2). Обладнання може працювати в ручному режимі при встановлені універсального перемикача SA 1 у положення Р чи в автоматичному при встановлені SA1 у положення А. Ручне включення і відключення трансформатора й електронагрівників ЕК1...ЕК4 здійснюють дистанційно за допомогою кнопок «Пуск» SB2 і «Стоп» SB1, попередньо ввімкнувши відповідно рубильники SA6...SA9 обігріву ґрунту і повітря та автомат QF. Автоматичне керування здійснюється за допомогою логометрів Р1 і Р2, що виконують одночасно роль регулятора і роль вимірювального приладу для візуального контролю фактичної температури ґрунту і повітря в парниках. У вимірювальні ланцюги логометрів включені за мостовою схемою термометри опору типу ТСМ, що є датчиками температури ґрунту ВК2, ВК4 і повітря ВК1 і ВКЗ.
Мостова схема врівноважується при заданій агрослужбою температурі. Якщо фактична температура нижче заданої, замикаються контакти Р1 чи Р2 і включаються магнітним пускачем КМ трансформатор TV і електронагрівальні елементи. При підвищенні температури до заданої розмикаються контакти Р1 і Р2, а магнітний пускач КМ відключає електроживлення. Перемикачами SA1 і SA2 і рубильниками SA6... SA9 включають обігрів ґрунту чи повітря. До штепсельного роз’єму ШР підключають електрифіковані механізми для обробки ґрунту і догляду за рослинами. Силу струму і значення напруги у всіх фазах контролюють амперметром і вольтметром з перемикачами SA4 і SA5. Точність регулювання температури +1,5°.
ЗАПИТАННЯ
1. Що забезпечує тепловий режим у спорудах закритого ґрунту? 2. Що забезпечує водний режим у спорудах закритого ґрунту? 3. Що забезпечує режим живлення у спорудах закритого ґрунту? 4. Що забезпечує газовий режим у спорудах закритого ґрунту? 5. По яких параметрах здійснюється автоматичний контроль і керування на тепличних комплексах? 6. Для чого використовуються два логометри температури в обладнанні обігріву парника КП-1? 7. Поясніть роботу принципової електричної схеми керування обігрівом парника КП-1
ТЕСТИ
1. Дайте визначення “утеплений грунт”
A. Це повністю або частково заглиблені в грунт каркасні споруди невеликої площі з прозорим покриттям
B. Це земельні ділянки, що можуть обігріватися чи не обігріватися, призначені для вирощування розсади і ранніх овочів
C. Це найдосконаліший і технічно оснащений вид капітальних споруд закритого грунту
2. Дайте визначення “теплиця”
A. Це найдосконаліший і технічно оснащений вид капітальних споруд закритого грунту
B. Це земельні ділянки, що можуть обігріватися чи не обігріватися, призначені для вирощування розсади і ранніх овочів
C. Це повністю або частково заглиблені в грунт каркасні споруди невеликої площі з прозорим покриттям
3. По яких параметрах здійснюється автоматичний контроль і керування на малих теплицях і парниках
A. По вологості ґрунту та повітря
B. По температурі ґрунту та повітря В залежності від погодних умов, виду і віку рослин
C. По температурі води для поливу ґрунту, зволоження повітря
4. Які пристрої використовуються для автоматичного керування парником із грунтово-повітряним електрообігріванням
A. Терморегулятор в шафі керування
B. Терморегулятор в шафі керування та датчики температури в грунті на глибині 0,1м та в повітряному просторі.
C. Датчики температури в грунті на глибині 0,1м
5.2. АВТОМАТИЧНЕ КЕРУВАННЯ МІКРОКЛІМАТОМ В АНГАРНИХ ТЕПЛИЦЯХ
Автоматичне керування температурним режимом здійснюється пристроями регулювання температури і кількості теплоносія, що гріє, а також пристроями керування відкриттям і закриттям кватирок вентиляції. В ангарних теплицях в основному використовується комбінований обігрів: водяний обігрів ґрунту і повітря і повітряно-калориферний обігрів повітря від водяних калориферів. Основний обігрів здійснюється регістрами, що гріють, а додатковий — від калориферів. Від калориферів підігріте повітря подається по повітропроводам і розподіляється вентиляційною системою по всій теплиці. Завдяки малій інерційності калориферний обігрів дає можливість керувати температурою повітря з високою точністю.
Вентиляція теплиці здійснюється через кватирки, розташовані в бокових стінах і на покрівлі. Зволоження повітря відбувається шляхом розпилення води через форсунки, які закріплені в підвішених у теплиці водопроводах на відстані приблизно 3 м одна від іншої. Для збору і відводу води, що утвориться на конструкціях теплиці при розпиленні і конденсації вологи, влаштовані спеціальні жолоби, по яких вода стікає в каналізацію. Вода на зволоження повітря і полив ґрунту підступає від водонагрівача під постійним тиском, створюваним насосною станцією. Полив здійснюється за допомогою дощувальної установки чи шлангів водою з температурою 16...25 °С.
Промисловістю розроблено кілька комплектів обладнання для керування мікрокліматом ангарних теплиць, наприклад, типу АМТ-600, СК-2, ОРМ-1, УТ-12 і інші. Як приклад розглянемо принцип роботи комплекту УТ-12.
Основною елементною базою УТ-12 є безконтактні транзисторні логічні елементи серії «Логіка-Т». У зв'язку зі зняттям цієї серії з виробництва комплект переводиться на мікросхемну елементну базу серії К-155 і ін.
Комплектне устаткування УТ-12 розміщене в окремих шафах і включає САК:
Температурою повітря в теплицях, у побутових приміщеннях і коридорі;
Температурою ґрунту;
Температурою поливної води;
Поливом ґрунту і зволоженням повітря;
концентрацією розчинів мінеральних добрив;
Подачею вуглекислого газу й опроміненням рослин.
Комплект розрахований на керування зазначеними параметрами в 12 відділеннях теплиці, а також температурою в сполучному коридорі та у побутових приміщеннях. Він забезпечує підтримку температури повітря, ґрунту і поливної води з точністю до ±1,5° у діапазоні заданих температур (0...40°С), концентрації розчинів мінеральних добрив з точністю до ±0,005 МПа в діапазоні від 0,01 до 0,2 МПа осмотичному тиску. Крім керування параметрами мікроклімату, комплект УТ-12 здійснює їхній вимір і реєстрацію.
У першій шафі керування ШУ1 (рис. 5.3) розміщені САК температурою повітря і ґрунту в 12 відділеннях теплиці і температурою повітря сполучного коридору і побутових приміщень, а також контрольно-реєстраційна система температури повітря в 12 відділеннях теплиці.
В другій шафі керування ШУ2 розміщені САК поливом ґрунту і зволоження повітря, а також САК подачею вуглекислого газу й опроміненням рослин у 12 відділеннях теплиці.
У третій шафі ШУЗ розташовані САК температурою поливної води, концентрацією розчинів мінеральних добрив, система контролю температурою зовнішнього і у 24 місцях внутрішнього повітря, а також система контролю швидкості вітру.
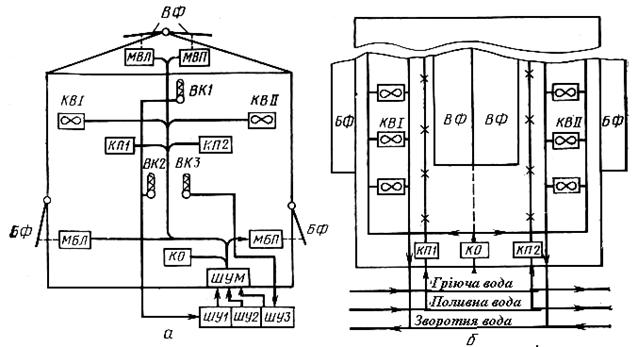
Рисунок 5.3. Схема розміщення обладнання УТ-12 в теплиці (а – вигляд з боку, б – вигляд зверху).
У четвертій шафі розташована пускозахисна апаратура насосів поливної води і насосів подачі концентрованого розчину мінеральних добрив, а також пускозахисна апаратура технологічних установок готування мінеральних добрив і керування температурою повітря коридору і побутових приміщень.
У п'ятій шафі керування встановлена проміжна апаратура, призначена для керування електромагнітними вентилями поливу й іншим устаткуванням теплиці. У сполучному коридорі для кожного відділення теплиці розташовані місцеві шафи керування обладнанням (ШУМ).
У теплиці встановлюють панель датчиків температури і панель датчиків вологості. Крім того, встановлюють датчики освітленості, швидкості вітру, температури поливної води, концентрації розчинів мінеральних добрив і інші.
Електроживлення шаф ШУ1...ШУЗ здійснюють від спеціальних блоків, що підключаються до трифазної мережі 220/380 В.
САК температурою працює по багатопозиційному законі регулювання і впливає на 16 виконавчих механізмів, що охоплюють 12 відділень тепличного блоку, сполучний коридор, побутове приміщення і дві системи ґрунтового обігріву.
Керування температурою повітря і теплиці здійснюється за допомогою двох груп водяних калориферів КВ1 і КВ11, конькової (верхньої) ВФ і бічний БФ систем кватирок. Вода, що гріє, з котельні подається в теплицю через клапан опалення КО, а тепла вода через клапани КП1 і КПІІ. Відкриття і закриття верхньої і бічної кватиркової вентиляції здійснюються за допомогою виконавчих механізмів верхньої лівий МВЛ і правої МВП, а також бічних лівої МБЛ і правої МБП систем вентиляції.
Послідовність роботи і стан обладнання керування температурою в теплиці залежать від значення і знака відхилення температури від заданої (рис. 5.4). Електрична схема керування температурою повітря приведена на рисунку 5.5.
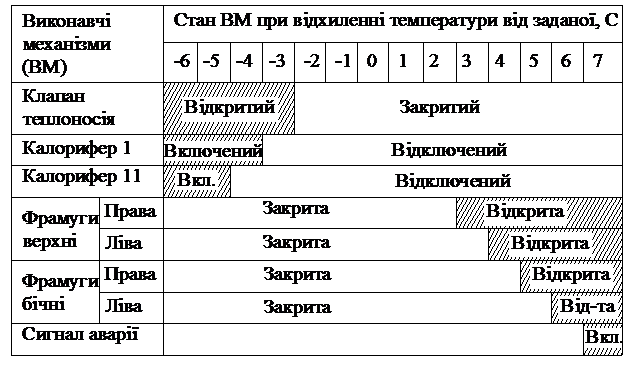
Рисунок 5.4. Карта функціонування комплекту технологічного обладнання УТ-12 в теплиці.
Блок дешифрації BD1 генерує імпульси з періодом 15 с. Кільцевий лічильник BD2 і 16-позиційний перемикач по черзі підключають датчики температури ВК1...ВК16 і задатчики Rз2...Rз16 до вимірювального моста через кожні 4 хвилини.
Сигнал розбалансу з вимірювального моста підсилюється фазочутливим підсилювачем У і надходить на граничні елементи D1...D14, зібрані за схемою двохпозиційного селектора рівня напруг.
Перемінними резисторами R1.,.R6; R8...R13 здійснюють настроювання порога спрацьовування кожного з елементів D1...D6; D8...D13 із кроком у 1° у діапазоні відхилень температури від —6 до +6° від заданої. Елементи D7 і D14 спрацьовують відповідно при короткому замиканні й обриві в ланцюгах датчиків температури.
Елементи D15...D28 служать підсилювачами потужності. Їхнім навантаженням є котушки реле KV1...KV6, KV8...KV13 і лампи HL1 і HL2, що сигналізують відповідно про коротке замикання й обрив у ланцюгах керування.
Напруга 24 В подається в шафи ШУМ (див. рис. 5.3 і 5.5) на керування виконавчими механізмами через замикаючі контакти KV7. При цьому блок БD1, що вмикає реле KV7 через кожні 15 с, забезпечує пятисекундну витримку часу спрацьовування реле KV7. Ця витримка необхідна для вимикання передачі помилкового сигналу до виконавчих механізмів, що виникає через перехідні процеси в перемикачах датчиків.
Граничні елементи спрацьовують і через реле KV1...KV13 вмикають відповідні виконавчі механізми в залежності від відхилення температури повітря від заданої: права (ліва) верхня конькова вентиляція включається при підвищенні температури в теплиці на 2 (3)°, а права (ліва) бічна стінна вентиляція - на 4 (5)°.
При відхиленні температури від заданої на —2° клапан опалення КО (рис. 5.4) відкривається «кроками» (один «крок» за один цикл опитування); на —3°-вмикається перша опалювальна група калориферів КВ1 на —40 — друга КВІІ. При відхиленні температури від заданої на + 6° спрацьовують граничні елементи D6 чи D13 які через реле КV6 чи КV13 вмикають аварійну звукову НА І світлову НL4 чи НL5 сигналізації.
Сигнальні лампи НL3 і HL6 показують знак відхилення температури (відповідно нижче чи вище заданої). Значення відхилення температури визначається по висвітленій цифрі в неоновій лампі. Наприклад, при відхиленні на —1° включається реле КV1 і загоряється цифра 1 неонової лампи HL7, при —20 спрацьовує реле KV2 і своїм контактом KV2 підключає в схему цифру 2 і т. д. (рис. 5.5, б). Сигнальна лампа HL показує в цифрах номер підключеного відділення теплиці.
Резисторами Rз1...Rз16 встановлюють задане значення температури в 16 об'єктах, резистором Rк коректують вимірювальний міст, а резистором Rу — змінюють чутливість (коефіцієнт підсилення) підсилювача У.
Блоком БО разом з 12 датчиками освітленості Rф1...Rф12 автоматично коректується задане значення температури в залежності від освітленості в теплиці. При освітленості більш 10 клк спрацьовує реле KVс, контакти якого вмикають сигнальну лампу HLс «Світлий» і резистор Rс, що викликає температурну надбавку вставки до 5°. При зниженні освітленості до 5...10 клк спрацьовує реле KVп яке вмикає сигнальну лампу HLп «Похмуро» і резистор Rп, що відповідає температурній надбавці близько 2,5°. При низької освітленості, наприклад у нічний час, спрацьовує реле КVТ яке вмикає сигнальну лампу HLТ і видає своїм контактом KVТ завдання на керування температурою, що відповідає темному періоду доби. Переклад схеми з автоматичного керування на ручне і назад виконують у відповідному шафі місцевого керування ШУМ.
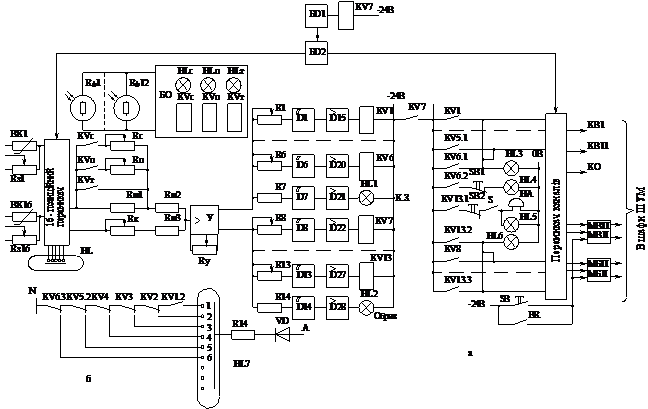 Рисунок 5.5. Принципова електрична схема керування температурою повітря в ангарних теплицях (а) і вмикання цифрової сигнальної лампи (б).
Рисунок 5.5. Принципова електрична схема керування температурою повітря в ангарних теплицях (а) і вмикання цифрової сигнальної лампи (б).
У разі потреби екстреного закриття кватирок чи зміни їхнього положення одночасно у всіх 12 відділеннях використовують кнопку SB3. Цілком кватирки закриваються також і автоматично по команді від анемометра BR при досягненні швидкості вітру гранично припустимого значення. Положення кватирок, поточне значення температури зовнішнього повітря і температури в теплицях контролюють прилади. Крім цього, температура в теплицях реєструється 12- канальним автоматичним мостом.
ЗАПИТАННЯ
1. За допомогою чого здійснюється автоматичне керування температурним режимом в ангарних теплицях? 2. Що включає САУ комплекту устаткування УТ-12 в ангарних теплицях? 3. Де розміщуються 16 датчиків температури в ангарних теплицях? 4. Де розміщуються виконуючі механізми фрамуг в ангарних теплицях? 5. Поясніть роботу принципової електричної схеми керування мікрокліматом в ангарній теплиці.
ТЕСТИ
1. Які датчики встановлюють в ангарній теплиці?
A. У теплиці встановлюють датчики освітленості, швидкості вітру, температури поливної води, концентрації розчинів мінеральних добрив
B. У теплиці встановлюють панель датчиків температури і панель датчиків вологості, концентрації розчинів мінеральних добрив
C. У теплиці встановлюють панель датчиків температури і панель датчиків вологості, датчики освітленості, швидкості вітру, температури поливної води, концентрації розчинів мінеральних добрив.
2. В якій послідовності використовуються виконуючі механізми в ангарній теплиці при знижені температури?
A. Виконуючі механізми фрамуг верхніх; права, ліва потім бічні фрамуги; права, ліва
B. Клапан опалення, клапана водяних калориферів.
C. Виконуючі механізми фрамуг верхніх; права, ліва потім бічні фрамуги; права, ліва та клапана водяних калориферів.
3. В якій послідовності використовуються виконуючі механізми в ангарній теплиці при підвищені температури?
A. Клапан опалення, клапана водяних калориферів.
B. Виконуючі механізми фрамуг верхніх; права, ліва потім бічні фрамуги; права, ліва.
C. Виконуючі механізми фрамуг верхніх; права, ліва потім бічні фрамуги; права, ліва та клапана водяних калориферів.
4. Використовуючи принципову електричну схему керування температурою повітря в ангарних теплицях вкажіть призначення 16 – позиційного перемикача.
A. 16-позиційний перемикач по черзі підключають датчики температури ВК1...ВК16 і задатчики до вимірювального моста через кожні 4 хвилини.
B. 16-позиційний перемикач задає режими керування.
C. 16-позиційний перемикач задає значення температур в ангарних теплицях
5. Для чого використовуються виконуючі механізми клапанів опалення в ангарних теплицях?
A. Виконуючі механізми клапанів опалення в ангарних теплицях використовуються для автоматичної подачі холодної води на регістри в теплиці при підвищені температури
B. Виконуючі механізми клапанів опалення в ангарних теплицях використовуються для подачі води на полив
C. Виконуючі механізми клапанів опалення в ангарних теплицях використовуються для автоматичної подачі гарячої води з центральної котельні на опалювальні регістри в теплиці при знижені температури.
6. Для чого використовуються виконуючі механізми клапанів водяних калориферів ангарних теплицях?
A. Виконуючі механізми клапанів водяних калориферів в ангарних теплицях використовуються для автоматичної подачі теплої води з на водяні калорифери в теплиці при різкому знижені температури
B. Виконуючі механізми клапанів водяних калориферів в ангарних теплицях використовуються для подачі води на полив
C. Виконуючі механізми клапанів водяних калориферів в ангарних теплицях використовуються для автоматичної подачі холодної води на регістри в теплиці при підвищені температури
5.3. АВТОМАТИЗАЦІЯ ПОЛИВУ ТА ПІДЖИВЛЕННЯ РОСЛИН
5.3.1. Автоматичне керування поливом
Автоматичне керування поливом в ангарних теплицях за допомогою обладнання УТ-12 здійснюється роздільно для нижньої і верхньої систем поливу. Вода для поливу надходять через нижню систему труб, що використовують також для подачі розчинів мінеральних добрив. Труби для поливу можна встановлювати на висоті від 0 до 2,2 м.
Поливна вода розподіляється по групі труб через електромагнітний вентиль. У кожній теплиці встановлена група вентилів, що по черзі включається на 2...4 хв. в одній теплиці, потім в інший і т. д.
Зволоження повітря в теплиці відбувається за рахунок короткочасного (на 10...30 с) відкриття вентилів системи труб верхнього поливу. Висота розміщення системи верхнього поливу не змінюється. Воду, використовувану для поливу і зволоження, попередньо підігрівають до заданої температури.
Система автоматичного керування температурою поливної води розміщається в шафах ШУ3, а в четвертій шафі — устаткування керування насосами і регулювальним клапаном КП. Вона працює в такий спосіб (рис. 5.6).
Датчик температури поливної води ВК2 і задатчик R1 температури в діапазоні від 0 до 40 °С приєднують до блоку регулюючого приладу БРП1. При відхиленні температури від заданому на ±1° спрацьовують відповідні граничні елементи в блоці БРП2 і включається реле KV1 чи KV2. При зниженні температури на 1° включається реле KV1, що викликає спрацьовування виконавчого механізму ВМ, що збільшує через регулюючий клапан КР впуск гріючої води у підігрівник поливної води ППВ. При підвищенні температури на 1° включається реле KV2, що подає сигнал до ВМ на зменшення пропуску води, що гріє, через регулювальний клапан. Для виключення перерегулювання при зміні відкриття виконавчого механізму застосовують імпульсний переривник — генератор імпульсів БD1 і реле KV3. На реле KV3 від блоку БD1 надходять через кожні 20 с. імпульси з установленої при налагодженні тривалістю від 1 до 10 с. Зміна впуску води, що гріє, відбувається короткочасно тільки при замкнутому положенні контактів реле KV3 і KV1 чи KV2, що виключає перерегулювання температури через інерційність ППВ. Логометр Р за допомогою датчика ВК1 вимірює температуру поливної води й обмежує її максимальне значення і випадку виникнення аварійної ситуації.
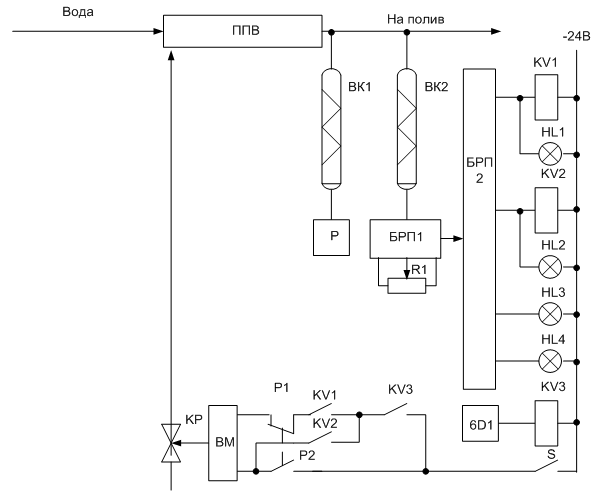 Рисунок 5.6. Принципова схема керування температурою поливної води.
Рисунок 5.6. Принципова схема керування температурою поливної води.
При досягненні максимально припустимого значення температури води логометр розмикає контакти Р1 і замикає контакти Р2, що викликає форсоване закриття регулюючого клапана КР. Потім при зниженні температури води до встановленого значення контакти логометра повертаються у вихідне положення і вводять у роботу систему регулювання температури води. Сигнальні лампи показують наступне: HL1—температура води менше заданої, HL2 — більше заданої, HL3— обрив і HL4—коротке замикання в колі датчиків.
Схема автомата полива приведена на рисунку 5.7. Програму поливу 12 теплиць набирають тумблерами SA2...SA24, програму зволоження — тумблерами SA1...SA23 (на малюнку не показані). Оскільки системи поливу і зволоження діють роздільно, а схеми керування ними аналогічні, то тут розглянемо тільки схему автоматичного керування поливом.
Тривалість поливу однієї теплиці (2...4 хв) установлюють перемикачем SA1, а кратність поливу (1...5) — тумблерами SA25...SA29. За допомогою реле KV1...KV12 і тумблерів SA2...SA24 включають відповідні групи електромагнітних вентилів поливу УА1...УА12 через проміжні реле, розташовані в місцевих шафах керування ШУМ. Вентилі можуть бути включені вручну за допомогою тумблера SA30 і перемикача SA31.
Систему поливу включають кнопкою SB чи по ланцюзі А через реле KV14 (див. рис. 5.9) у заданий час доби. При цьому включаються реле KV18 і KV19 (рис. 5.7), останнє своїми контактами подає від блоку живлення БЖ напругу в схему автомата, а всі тригери елементів D1...D13 приходять у вихідне положення, і спрацьовують реле KV1 і KV13. Слідом за цим спрацьовує реле KV20 при включеному тумблері SA25 «Кратність поливу 1». Контакти реле KV20 включені паралельно контактам реле KV19 і забезпечують підключення блоку БЖ до автомата при відпусканні кнопки SB.
Одночасно з натисканням кнопки SB і подачею напруги на схему від блоку БДЗ спрацьовує реле KV23, що включає основний насос поливу НП через проміжне реле, розташоване в шафі ШУМ.
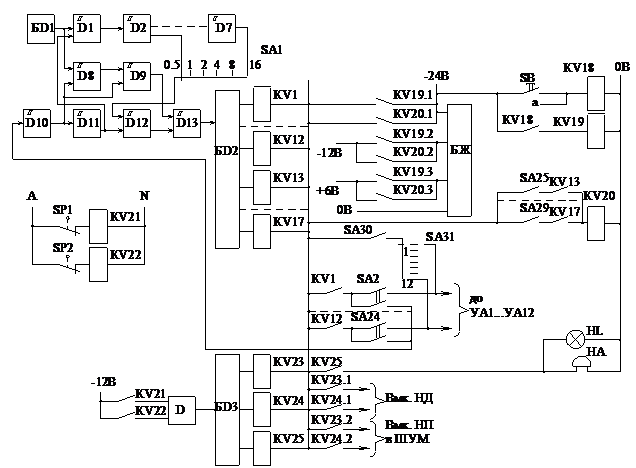
Рисунок 5.7. Принципова електрична схема автомата УТ-12 поливу грунту.
Якщо пуск насоса не відбувся, то контакти реле тиску води SP1 залишилися замкнутими. У цьому випадку на елемент D через контакти KV21 надходить сигнал «1», що через 1 хв за допомогою блоку кільцевого лічильника БДЗ відключає реле KV23 і підключає реле KV24. Реле KV24 подає команду на включення резервного насоса поливу НП. Якщо протягом наступної хвилини тиск у системі поливу не з'явиться, то реле KV24 відключиться, а реле KV25 вмикає ревун НА і сигнальну лампу HL «Аварія». Насоси-дозатори НД використовують для подачі розчинів мінеральних добрив. З включенням насоса НП починається полив першої теплиці. Через контакти КV1 і включений перемикач SA2 подається сигнал «1» (—24 В) на вхід елемента D10, а з виходу елемента D11 сигнал «1» надходить на елементи D1 і D12. На вихід елемента D1 подаються також сигнали з періодом 2 с. від генератора імпульсів БД1. Період цих сигналів збільшується тригерами, виконаними на елементах D2...D7. У залежності від положення перемикача SA1 «Час поливу» на елемент D12 надходять сигнали «I» з періодом 0,5; 1; 2; 4; 8 чи 16 хв, що потім через елементи D12 і D13 надходять на блок дешифрації БД2 (кільцевий лічильник). Кільцевий лічильник викликає почергове спрацьовування реле KV1...KV12, що забезпечують послідовний полив 12 теплиць (ділянок) з інтервалом, рівним обраного часу поливу.
Якщо полив якоїсь ділянки не передбачений, то відповідний тумблер з SA2...SA24 не включений. У цьому випадку при спрацьовуванні відповідного реле з KV1...KV12 на вхід елемента D10 «НЕ» надходить сигнал «0», а з його виходу сигнал «1» надходить на входи елементів D8 і D9, що реалізують логічну функцію «І». Тому що на вхід елемента D8 надходять також імпульси з періодом 2 с від блоку БД1, то через елемент D9 на вхід D13, а потім на дешифратор БД2 сигнал «1» приходить через 2 с. Цей імпульс викликає переключення дешифратора БД2, і час проходу ділянки, що неполивається, скорочується до 2 с.
Після спрацьовування реле KV12, що забезпечує полив останньої дванадцятої ділянки, відключається реле KV13, і включається реле KV14. Це забезпечує запуск нового циклу поливу тих же ділянок у тій же послідовності.
Процес повторюється доти, поки не реалізується задана тумблерами SA25...SA29 кратність поливу. Після цього реле KV20 відключається і знімає напругу живлення зі схеми автомата поливу. Робота автомата поливу припиняється.
5.3.2. Автоматичне управління концентрацією розчину мінеральних добрив
Система автоматичного керування концентрацією розчину мінеральних добрив (рис. 5.8) призначена для контролю концентрації та стабілізації її в межах, заданих агротехнічними вимогами. Концентрований розчин мінеральних добрив готують в спеціальному басейні Б, звідки насоси-дозатори НД подають його через регулюючий клапан КР1 в поливну воду. Насоси НД Вмикаються періодично від пускових реле аналогічно вмиканню поливних насосів НП.
Концентрація добрив вимірюється по електропровідності живильного розчину в магістральному трубопроводі за ділянкою змішування концентрованого розчину і поливної води. В трубопроводі встановлено датчик ДД кондуктометричного типу з температурною компенсацією, що підключений через аналізатор добрив АД до двопозиційного регулятора РП. Регулятор керує виконавчим механізмом ВМ1 за допомогою реле KV1 «Концентрація більше» і KV2 «Концентрація менше». Якщо концентрація знаходиться в межах заданої (0,02—0,035 См/см), регулятор відключає виконавчий механізм.
Враховуючи суттєву величину транспортного запізнення, для поліпшення якості двопозиційного регулювання використовується імпульсний перервник: реле KV3 і генератор імпульсів БД з періодом 20 с.
Іншим, не менш важливим, завданням регулювання є стабілізація кислотно-лужної реакції розчину (РН), яку регулюють на етапі приготування концентрованого розчину в межах 5,4—6,4 за допомогою електродного датчика потенціометричного типу ДрН, точність якого досягає 0,1 РН. При відхиленні рН від заданого виконавчий механізм ВК2 змінює ступінь відкриття регулюючого клапана КР2. Це веде до зміни подачі з бака БК спеціального розчину, що коригує значення РН в басейні Б. Мішалка М прискорює вирівнювання концентрації мінеральних добрив і РН по всьому об'єму.
Такі системи регулювання концентрації добрив вирішують задачу стабілізації режимних параметрів на вході в об'єкт і задовільно працюють лише при технології вирощування рослин з циркуляцією розчину поживних речовин (гідропоніка, водна, тонкоплівкова культура). Ґрунтова або субстратна технологія, які не передбачають повернення живильного розчину в систему, потребують урахування буферності, водоутримуючої здатності і можливості засолення субстрату. В цьому випадку необхідний зворотній зв'язок по параметрах субстрату шляхом установки датчиків безпосередньо в ньому. Проблема полягає у відсутності надійних датчиків.
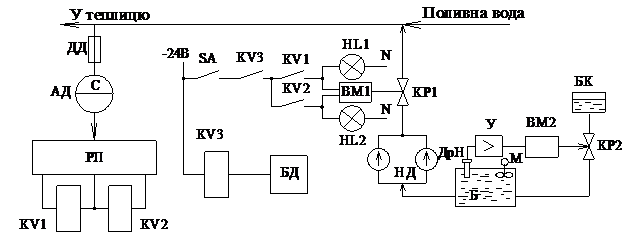
Рисунок 5.8. Схема автоматичного управління концентрацією мінеральних добрив
5.3.3. Автоматичне управління підживленням вуглекислим газом і досвіченням рослин
Додаткове опромінювання і вуглекислота потрібні рослинам для підсилення фотосинтезу. Вміст вуглекислоти в теплиці підвищують шляхом спалення природного газу в спеціальних пальниках (газогенератори Г—4,5) або відпрацьованим газом з котельної.
Управління здійснюється за заданою програмою з 24-годинним циклом за допомогою реле часу (рис. 5.9). Генератор імпульсів БД1 подає імпульси періодичністю 2 год на вхід 12-позиційного кільцевого лічильника БД2. Реле KV1—KV12 спрацьовують з інтервалом 2 год, забезпечуючи роботу проміжного реле KV15. Реле KV15 керує газогенераторами СО2, розміщеними в теплицях. Після відключення реле KV12 завершує керування подачею СО2 в останню теплицю, спрацьовує реле KV13. Контакти реле KV13 подають нульовий потенціал до всіх тригерів блоку БД1, що повертає їх у вихідний стан. Потім знову підключається реле KV1, і починається новий добовий цикл.
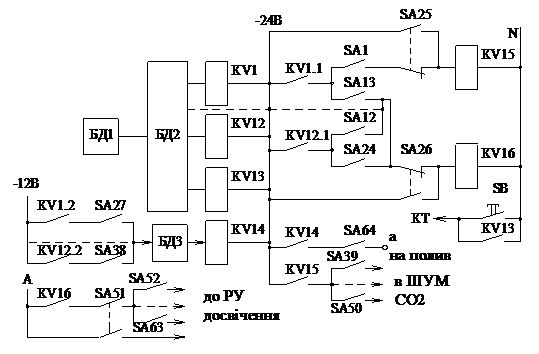
Рисунок 5.9. Схема автоматичного управління досвіченням і підживленням вуглекислим газом.
Тригери можна перевести у вихідний стан, натиснувши кнопку SВ «Установка часу 12 ч». Номера теплиць, у які необхідно подавати СО2, набирають тумблерами SA39...SA50, а тривалість підживлення СО2 встановлюють тумблерами SА1...SA12, причому перший включений тумблер визначає початок підживлення, останній — закінчення. За допомогою тумблера SA25 вручну керують підживленням СО2 без обмеження в часі.
Керування досвіченням здійснюється за допомогою реле КV16 у розсадних теплицях.
Якість регулювання забезпечується за рахунок двох автономних двопозиційних регуляторів, вставки яких відрізняються на 0,04 %. Це забезпечує ввімкнення виконавчих механізмів і регулюючих клапанів двох груп газогенераторів. Вмикання схеми підживлення СО2 автоматично блокується при зниженні рівня освітленості, при відкритих фрамугах і підвищеній відносній вологості в теплиці.
Досвічення рослин здійснюють за допомогою опромінюючих установок ОТ-400 з ртутними лампами ДРЛФ-400 в програмному або автоматичному (за допомогою датчика освітленості) режимі управління. При рівні освітленості нижче 5 клк п'ять опромінюючих установок в розсадній теплиці вмикаються з регульованим інтервалом від 0,5 до 6 хв. Це виключає токові сплески, що можуть виникати при одночасному вмиканні всіх лами. Крім того, пороговий пристрій має затримку 1—3 с, що забезпечує нечутливість до короткочасних спалахів світла.
Схема автоматичного керування досвіченням працює аналогічно схемі керування підживлення СО2.
Контакти реле KV16 підключають фазу А через тумблери SA52...SA63 «Ділянка досвічення» до розподільних щитків РУ керування досвіченням.
Тривалість досвічення визначається в годиннах і дорівнює подвійному одночасно включених тумблерів SA13...SA24 «Досвічення», а початок і кінець досвічення визначаються першим і останнім з включених тумблерів. Ручне керування досвіченням здійснюють тумблерами з розподільних щитків керування РУ.
Реле KV1...KV12 і KV14 разом із блоком дешифрації БДЗ і тумблерами SA64; SA27...SA38 здійснюють «Включення поливу в заданий час» через реле KV18 (рис. 5.9, а). За допомогою тумблерів SA27...SA38 (рис. 5.9) набирають ділянки, необхідні для поливу. Блок БДЗ забезпечує витримку часу у включеному стані до 5 с, після чого реле KV14 знеструмлюється і сигнал «Пуск» з автомата поливу знімається.
ЗАПИТАННЯ
1. Як здійснюється полив в ангарних теплицях за допомогою устаткування УТ-12? 2. Як здійснюється зволоження повітря в ангарних теплицях за допомогою устаткування УТ-12? 3. Поясніть роботу принципової електричної схеми керування підігрівом поливної води. 4. Поясніть роботу принципової електричної схеми керування автомата поливу в ангарній теплиці. 5. Поясніть роботу принципової електричної схеми керування Управління концентрацією мінеральних добрив В ангарній теплиці. 6. Поясніть роботу принципової електричної схеми керування автоматичного управління досвіченням і підживленням вуглекислим газом В ангарній теплиці.
ТЕСТИ
1. Як здійснюється підігрів поливної води в ангарних теплицях?
A. Підігрів поливної води в ангарних теплицях здійснюється водонагрівачем
B. Підігрів поливної води в ангарних теплицях здійснюється змішуванням гарячої води з холодною
C. Підігрів поливної води в ангарних теплицях здійснюється на котельні.
2. Використовуючи принципову електричну схему керування підігрівом поливної води в ангарних теплицях вкажіть призначення датчика температури ВК2
A. Датчик температури ВК2 призначений для виміру температури холодної води
B. Датчик температури ВК2 призначений для виміру температури поливної води
C. Датчик температури ВК2 призначений для виміру температури гарячої води
3. Використовуючи принципову електричну схему керування підігрівом поливної води в ангарних теплицях вкажіть призначення виконуючого механізму ИМ
A. Виконуючий механізм ВМ призначений для автоматичного керування клапаном КР для подачі води
B. Виконуючий механізм ВМ призначений для автоматичного керування регулюючим клапаном КР для подачі ї води в підігрівник
C. Виконуючий механізм ВМ призначений для автоматичного керування регулюючим клапаном КР для подачі граючої води в підігрівник поливної води.
4. Використовуючи принципову електричну схему керування автомата поливу в ангарних теплицях вкажіть як задається програма поливу та зволоження
A. Програму поливу 12 теплиць набирають тумблерами SA2...SA24, програму зволоження — тумблерами SA1...SA23
B. Програму поливу 12 теплиць набирають тумблерами SA25...SA29
C. Програму поливу 12 теплиць набирають тумблерами SA25...SA29, програму зволоження — тумблером SA1
5. Використовуючи принципову електричну схему керування автомата поливу в ангарних теплицях вкажіть призначення електромагнітних вентилів поливу УА1...УА12
A. Електромагнітні вентилі поливу УА1...УА12 призначені для автоматичної подачі води в теплицю.
B. Електромагнітні вентилі поливу УА1...УА12 призначені для подачі гарячої води в теплицю.
C. Електромагнітні вентилі поливу УА1...УА12 призначені для автоматичної подачі поливної води в теплицю з заданою тривалістю і кратністю.
5.4. АВТОМАТИЗАЦІЯ УСТАНОВОК ДЛЯ ОПРОМІНЕННЯ РОСЛИН В УМОВАХ ЗАХИЩЕНОГО ГРУНТУ
Для створення необхідного світлового режиму в теплицях використовують опромінюючі установки. Ці установки повинні спрямовувати весь світловий потік джерела випромінювання безпосередньо на корисну площу стелажа. Крім того, випромінювач необхідно наблизити до рослин на мінімально допустиму відстань.
Для опромінення рослин в теплицях вітчизняна промисловість випускає тепличні опромінювачі типу ОТ-400 з лампою ДРЛФ-400, ОГС01 «Фотос» з лампами ДРИ 1000-6, ДРИ 2000-6 та ДРИ 3500-6, установку опромінювання рослин у теплицях УОРТ-2-3000 з металогенною лампою ДМЗ-3000, систему опромінення рослин у теплицях СОРТ1 з лампою ДКсТЛ 10 000 та інші. На рис. 5.10 зображено опромінювач типу ОТ-400. Він складається з лампи ДРЛФ-400, корпуса з баластним пристроєм, фарфорового патрона, вузла для підвішування, двох відрізків шлангового кабелю. Один відрізок кабелю обладнаний розеткою, а другий — вилкою. Вилка і розетка дають можливість об'єднувати в групу з послідовним живленням до п'яти опромінювачів.
|
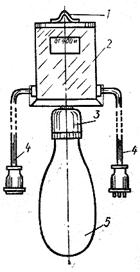
Установки СОРТ1, ОГС01, УОРТ-2 дають можливість забезпечити необхідний для розвитку рослин світловий потік при меншій більш як у два рази витраті електроенергії порівняно з опромінювачами типу ОТ-400.
Опромінювальні установки, що використовуються в теплицях, можуть бути стаціонарними і пересувними.
Робота принципіальної електричної схеми опромінювача ОТ-400, яка зображена на рисунку 5.11, полягає в слідуючому. Напруга на установку подається вмиканням автоматичного вимикача QF і через запобіжник поступає на перемикач режимів SA. Він має три положення: “А”- автоматичний режим, “О”- вимкнено, “Р”- ручний режим.
При автоматичному режимі перемикач SA встановлюємо в положення ”А”. Напруга керування подається на котушку програмного реле часу КТ1. Воно своїм контактом, в заданий час доби, замикає коло і подає напругу керування на котушку магнітного пускача КМ. Магнітний пускач КМ замикає свої силові контакти і подає напругу на пускорегулювальні апарати опромінювальних ламп ЕL1…EL15. Додатковий контакт магнітного пускача КМ замикається і подає напругу на котушки проміжних реле КV1 та реле часу КТ2. Замикаючі контакти проміжного реле в колі пускорегулювальних апаратів замикаються і заряджають конденсатор С до напруги пробою розрядника FY. В момент пробою розрядника по первинній обмотці трансформатора ТV2 протікає струм. У вторинній обмотці трансформатора ТV2 виникає імпульс напруги з амплітудою до 2...3 кВ, який забезпечує виникнення розряду у внутрішній кварцовій колбі. Час розігрівання лампи становить 2..4 хв., повторне запалювання можна здійснити лише через 5...10 хв. залежно від умов охолодження. Розмикаючі контакти проміжного реле вимикають котушки своїх реле після подачі напруги на пускорегулювальні апарати.

Рисунок 5.11 Принципова електрична схема керування опроміненням рослин в теплиці установкою ОТ-400МИ
По закінчені запалювання ламп контакти реле часу КТ2 в колі проміжного реле вимикають котушку КV1. А другим своїм контактом вимикається сам.
В ясний світловий день контакт фотореле К розмикається і вимикає магнітний пускач КМ, а він опромінювальні лампи, що приводить до економії електроенергії. Фотореле К має фоторезистор ВL, який знаходиться всередині приміщення теплиці, но не попадає під дію світлового потоку випромінювальних ламп.
При ручному керуванні перемикач SA встановлюємо в положення “Р”. Натискаючи пускову кнопку SB2 подається напруга на котушку магнітного пускача КМ. Він своїми силовими контактами подає напругу на лампи опромінювальної установки, а додатковим контактом шунтує кнопку SB2. В ручному режимі вимикання установки здійснюється за допомогою кнопки SB1 “Стоп”, або поставивши перемикач SA в положення “О”.
Лампа НL, яка знаходиться на шафі керування, сигналізує про вмикання котушки магнітного пускача КМ і відповідно про подачу напруги на лампи опромінювальної установки.
ЗАПИТАННЯ
1. Для чого використовують опромінюючі установки в теплицях? 2. Які тепличні опромінювачі використовуються для опромінення рослин? 3. З чого складається опромінювач типу ОТ-400? 4. Поясніть роботу принципової електричної схеми керування тепличним опромінювачем типу ОТ-400?
ТЕСТИ
1. Які лампи використовуються в тепличному опромінювачі типу ОТ-400?
A. Метало генною лампою ДМЗ-3000
B. Лампою ДРЛФ-400
C. Лампою ДКсТЛ 10000
2. Який пристрій потрібно використовувати для автоматичного керування опромінювачами в теплиці по заданій програмі?
A. Програмне реле часу.
B. Фотореле з фоторезистором.
C. Реле затримки часу.
3. Який пристрій потрібно використовувати для автоматичного керування опромінювачами теплиці в залежності від освітленості?
A. Фотореле з фоторезистором
B. Програмне реле часу
C. Реле затримки часу
4. За допомогою принципової електричної схеми ОТ-400МИ вкажіть які засоби автоматизації використовуються в автоматичному режимі роботи?
A. Програмне реле часу.
B. Фотореле з фото резистором, програмне реле часу, реле затримки часу.
C. Фотореле з фоторезистором, реле затримки часу.
5. За допомогою принципової електричної схеми ОТ-400МИ вкажіть для чого використовується фотореле К з фотодатчиком ВL?
A. Для автоматичного керування опромінювачем по програмі
B. Для ручного керування опромінювачем залежності від освітленості зовні приміщення.
C. Для автоматичного керування опромінювачем в залежності від освітленості в приміщені.
6. Використовуючи принципову електричну схему ОТ-400МИ вкажіть несправності виникли якщо не вмикається котушка магнітного пускача КМ тільки в заданий час доби?
A. Обрив в колі перемикач SA, фотореле К, фотодатчик ВL
B. Обрив в колі живлення програмного реле часу КТ; перемикач SA
C. Обрив в колі живлення програмного реле часу КТ; перемикач SA, контакт КТ або механічна поломка.
5.5. АВТОМАТИЗАЦІЯ МІКРОКЛІМАТУ В ТЕПЛИЦЯХ ЗА ДОПОМОГОЮ ПРОГРАМНИХ КОНТРОЛЕРІВ
Програмні контролери та регулятори, в даний час, широко використовуються для підтримання мікроклімату. Їх можна програмувати не тільки по температурі, а у часі на весь період вирощування рослин в теплицях. За допомогою інтерфейсу підключати до ПК та регіструвати, контролювати показники та коректувати технологічні параметри вирощування рослин.
Регулятор температури і вологості, програмований за часом, МПР51-Щ4 призначений для управління багатоступінчатими температурно - вологісними режимами технологічних процесів (рис 5.12). Застосувується МПР51 як вимірник-регулятор температури і вологості, вимірник-регулятор температури і різниці температур, Двохканальний вимірник-регулятор температури з додатковим каналом сигналізації.

Рисунок 5.12. Приклад використання Регулятора температури і вологості, програмований за часом, МПР51-Щ4
Регулятор температури і вологості виконує слідуючі автоматичні функції:
Вимірювання трьох параметрів: температури «сухого» термометра, Тсух; температури «вологого» термометра, Твл.; температури повітря, Тпов;
Обчислення двох додаткових параметрів: різниці температур ; вологості ψ психрометричним методом (за свідченнями «сухого» і «вологого» термометрів);
Два ПІД-регулятори для підтримки будь-яких двох з п'яти вище перелічених величин з високою точністю;
Чотири вихідних реле для підключення ТЕНів, охолоджувальних систем, засувок і інших виконавчих пристроїв
Регулювання за заданою користувачем програмою;
Додаткове реле і 8 транзисторних ключів: для сигналізації про аварію і про закінчення виконання програми; для управління додатковим обладнанням;
Автонастройка ПІД-регуляторів;
Рівні захисту настройок приладу для різних груп фахівців (налагоджувачів, технологів і т. д.);

Рисунок 5.13. Функціональна схема приладу МПР51-Щ4
Реєстрація контрольованих параметрів на ПК через адаптер мережі ОВЕН АС2 по інтерфейсу RS-232;
Вбудований інтерфейс RS-485 по заказу;
Конфігурація на ПК за допомогою програми-конфігуратора (для підключення до ПК використовується спеціальний кабель).
Регулятор МПР51-Щ4 має три входи для вимірювання температур: датчики температури Тсух, Твол. і Тпов і підключають до входів 1...3. Прилад має дві модифікації входів: для підключення датчиків ТСМ/ТСП опором 50 Ом; та для підключення датчиків ТСМ/ТСП опором 100 Ом, а також R100. також використовуються резистивних датчики положення засувки, які підключаються до входів 4 і 5 (рис. 5.13)
За допомогою 2 ПІД-регуляторів МПР51-Щ4 забезпечують точну підтримку будь-яких двох з п'яти виміряних і обчислених параметрів: Тсух, Твол, Тпов, ψ і ΔТ.(рис. 5.14).
|

Для регулювання в МПР51-Щ4 використовуються 4 двохпозиційних нормально розімкнених реле із струмом контактів на 4 А при 220 В, які попарно закріплені за ПІД-регуляторами. ПІД-регулятори можуть управляти різними виконавчими механізмами: двохпозиційним (ТЕНом, охолоджувачем) з використанням одного реле; трьохпозиційним (засувкою) з використанням двох реле (рис. 5.15).
Для управління додатковим обладнанням або для сигналізації про хід технологічного циклу можна використовувати п'яте реле «Аварія» або 8 транзисторних ключів з відкритим колектором.
Будь-яке незадіяне реле може використовуватися одним з компараторів для сигналізації про вихід контрольованої величини за задані межі або для двохпозиційного регулювання.
Зміна параметрів регулювання здійснюється за заданою користувачем програмою, що складається з послідовних кроків. На кожному кроці програми можуть бути задані:
вхідна величина (з п'яти можливих) для кожного ПІД-регулятора;
T вставки підтримуваних температур і вологості;
умови переходу до наступного кроку — за часом і (або) після досягнення заданого значення температури (вологості);
швидкість виходу на вставку;
режими проходження імпульсів для транзисторних ключів.
|

Програми запам'ятовуються в незалежній пам'яті приладу, а потім використовуються по вибору користувача. Кількість програм, що зберігаються в пам'яті приладу, залежить від числа кроків в кожній. Кількість кроків в програмі задається користувачем. Всього прилад може зберігати від 60 програм по 7 кроків кожна до 5 програм по 99 кроків кожна.
Прилад видає сигнал «Аварія» замиканням контактів п'ятого реле приладу і свіченням світлодіода «Аварія»:
при виході будь-якого з регульованих параметрів за задані межі;
при обриві або короткому замиканні датчика;
при діагностиці неможливості продовження роботи;
після закінчення виконання програми.
У разі тимчасового відключення живлення під час виконання програми подальші дії приладу визначаються по заданому користувачем алгоритму.
Значення параметрів задаються за допомогою кнопок на лицьовій панелі приладу. Для кожної групи фахівців (налагоджувачів, технологів і т. д.) є своя група параметрів, доступ до якої можливий тільки через пароль.
Існує можливість завдання і зміни параметрів МПР51-Щ4 за допомогою програми-конфігуратора на ПК. Для цього прилад необхідно підключити до ПК за допомогою спеціального кабелю.
У приладі передбачена можливість реєстрації ходу технологічного процесу на ПК. Для реєстрації можна використовувати SCADA-систему Owen Process Manager або яку-небудь іншу програму.
Залежно від модифікації, підключення приладу до ПК здійснюється по інтерфейсу RS-232 через адаптер мережі ОВЕН АС2 або по інтерфейсу RS-485 через адаптер АСЗ-м або АС4.
Восьмиканальний універсальний ПІД-регулятор ТРМ148 призначений для побудови автоматизованих систем клімат-контроля і має 8 універсальних входів для підключення широкого спектру датчиків та 8 вбудованих вихідних елементів різних типів у вибраній користувачем комбінації для управління виконавчими механізмами (рис 5.16):
2-х позиційними (ТЕНи, двигуни, пристрої сигналізації);
3-х позиційними (засувки, крани).

Рисунок 5.16. Функціональна схема приладу ТРМ148.
Регулятор виконує обчислення додаткових функцій від виміряних величин (квадратного коріння, різниці, середнього арифметичного, відносної вологості психрометричним методом, мінімуму, максимуму і ін.). Здійснює, відповідно до завдання, корекцію графіка вставок по вимірюваннях з іншого входу або за часом.
Регулятор здійснює автонастройку ПІД-регуляторів. Має режим ручного управління вихідною потужністю, та можливість підключення ПК через вбудований інтерфейс RS-485 .

Рисунок 5.17. Приклад використання Восьмиканального універсального ПІД-регулятора ТРМ148 для підтримання мікроклімату в теплиці.
Розміщення датчиків Д1-Д8 в теплиці та виконавчих механізмів ВМ1-ВМ8 показано на рисунку 5.17. Датчик температури Д1 ґрунту на рівні коріння рослин керує роботою обігрівача ґрунту ВМ1, датчик температури повітря Д2 здійснює керування ТЕНами підігріву повітря. Вентилятор для подачі повітря в теплицю автоматично керується в залежності від швидкості переміщення повітря Д4, а витяжним вентиляторм ВМ5 автоматично керує датчик тиску повітря Д5. Датчик тиску О2 подає сигнал на керування подачею через електроклапан ВМ6 кисню. Датчик вологості Д8 через регулятор здійснює керування електроклапаном подачі води на полив ВМ8, а температура цієї води підтримується ТЕНами ВМ3 за допомогою датчика Д3.
ЗАПИТАННЯ
1. Для чого Призначений МПР51-Щ4? 2. Які Автоматичні функції виконує регулятор температури і вологості МПР51-Щ4? 3. Як Здійснюється зміна параметрів регулювання МПР51-Щ4? 4. Для чого Призначений вОсьмиканальний універсальний ПІД-регулятор ТРМ148 ? 5. Як здійснюється підтримання мікроклімату в теплиці за допомогою ТРМ148?
ТЕСТИ
1. Скільки і які входи має Регулятор температури і вологості МПР51-Щ4?
А. Має чотири вХоди для вимірювання температур: дАтчики температури Тсух, Твол, Тпов і ΔТ.
В. Має пять вХодів для вимірювання температур: дАтчики температури Тсух, Твол, Тпов, ψ і ΔТ.
С. Має три вХоди для вимірювання температур: дАтчики температури Тсух, Твол. і Тпов.
2. Скільки і які виходи має Регулятор температури і вологості МПР51-Щ4?
А. 4 двохпозиційних нормально розімкнених реле із струмом контактів на 4 А при 220 В, які попарно закріплені за ПІД-регуляторами та п'яте реле «Аварія» або 8 транзисторних ключів з відкритим колектором.
В. 5 двохпозиційних нормально розімкнених реле із струмом контактів на 4 А при 220 В, які попарно закріплені за ПІД-регуляторами
С. 3 двохпозиційних нормально розімкнених реле
3. Які додаткові функції Виконує регулятор ТРМ148?
А. ОБчислення від виміряних величин (квадратного коріння, різниці, середнього арифметичного)
В. ОБчислення від виміряних величин (квадратного коріння, різниці, середнього арифметичного, відносної вогкості психрометричним методом, мінімуму, максимуму і ін.).
С. ОБчислення квадратного коріння, різниці, середнього арифметичного, відносної вогкості психрометричним методом, мінімуму, максимуму і ін.
4. Яким виконавчими механізмами здійснює керування ТРМ148?
А. 3-х позиційними (засувки, крани).
В. 2-х позиційними (ТЕНи, двигуни, пристрої сигналізації).
С. 2-х позиційними (ТЕНи, двигуни, пристрої сигналізації), 3-х позиційними (засувки, крани).
РОЗДІЛ 6. АВТОМАТИЗАЦІЯ СХОВИЩ СІЛЬСЬКОГОСПОДАРСЬКОЇ ПРОДУКЦІЇ
6.1. АВТОМАТИЗАЦІЯ ОВОЧЕСХОВИЩ
Сховища сільськогосподарської продукції призначені для зберігання зерна, соковитих кормів, комбікормів, картоплі, овочів, фруктів тощо. Зберігання великої маси продукції в обмеженому об'ємі висуває специфічні вимоги до систем автоматизації.
Особливо небезпечними є окремі вогнища загнивання, які швидко розповсюджуються по об'єму продукції, що зберігається. Для запобігання цього явища використовують метод активної вентиляції з інтенсивністю до 300 м3/год на 1 т продукції. Температура повітря, особливо взимку, повинна втримуватись у допустимих межах, щоб не допустити пошкодження продукції. Тому в окремих випадках сховища обладнують калориферами для підігрівання повітря взимку або холодильними агрегатами для охолодження повітря влітку і восени. Найважливішими параметрами мікроклімату, що підлягають контролю і регулюванню, є температура і вологість.
Автоматизація мікроклімату в овочесховищах здійснюється з урахуванням агротехнічних вимог зберігання окремих видів сільськогосподарської продукції. Основним діючим фактором є активна вентиляція, яка забезпечує видалення надмірної вологи з поверхні коренеплодів і овочів, а також сприяє вирівнюванню волого-температурних полів в об'ємі продукції, що зберігається.
Повітря в масу продукції, що зберігається подають за допомогою припливних вентиляційних систем, обладнаних відцентровими або осьовими вентиляторами. Режим роботи вентиляційної системи залежить від температури зовнішнього повітря і технології зберігання продукції. Наприклад, технологія зберігання картоплі передбачає три режими: лікувальний, охолодження і зберігання.
У лікувальний період, який триває 2 тижні температура картоплі підтримується на рівні +14...18°С при мінімальному повітрообміні і високій відносній вологості (понад 90%). При закладанні вологої картоплі її підсушують активною вентиляцією повітрям з вологістю не більше 80%.
У період охолодження температуру картоплі знижують до 2-4°С з швидкістю 0,5…0,6 °С на добу при максимальній вологості повітря 100 %. Період охолодження становить 20…25 діб.
Період зберігання – основний період. Температура в об'ємі картоплі підтримується на рівні +3...4°С. Відносна вологість максимальна. Вентиляція здійснюється зовнішнім повітрям або сумішшю внутрішнього та зовнішнього повітря (взимку).
Аналогічні агротехнічні вимоги до систем автоматичного управління розроблені й для інших видів овочів.
Для автоматичного управління мікрокліматом овочесховищ розроблені дві системи обладнання: ОРТХ і «Середовище».
Обладнання ОРТХ призначене для підтримання температурного режиму повітря і маси продукції, що зберігається в сховищах до 1000 т (рис. 6.1). Автоматичне управління здійснюється за допомогою шафи автоматичного управління активною вентиляцією ШАУ-АВ (рис. 6.2). Температуру зовнішнього і внутрішнього повітря, повітря в вентиляційному каналі, а також температуру продукції контролюють датчики температури ВК1…ВК6 і логометра.

Рисунок. 6.1. Схема розміщення технологічного обладнання для управління мікрокліматом овочесховища
Перемикачами SA1 і SA3 здійснюється вибір управління: ручний або автоматичний. При ручному управлінні кнопки SВ1 і SB2 управляють вентиляторами і калориферами двох рециркуляційно-опалювальних систем, SВ3 і SB4 – підігрівачем змішувального клапана, SB5 і SB6 – припливною вентиляцією.
При автоматичному управлінні (перемикач SA1 в положенні А) робота схеми залежить від періоду зберігання. В лікувальний період (перемикач SA2 в положенні Л) працює вентилятор припливної вентиляції. Періодично (згідно з вставкою програмного реле часу) він вмикається на 30 хв. магнітним пускачем КМ4.
У період охолодження (перемикач SA2 в положенні О) в дію вводиться диференційний терморегулятор РТ1 (типу ПТРД-2), який порівнює температуру продукції і повітря. При різниці температури більше 2 – 3°С регулятор РТ1 вмикає проміжне реле KV2. Своїми контактами KV2.1 реле вмикає регулятор РТ3 (ПТР-2) і з витримкою часу – регулятор РТ4. В результаті пускач КМ4 вмикає вентилятор і пропорційний терморегулятор РТ5 (ПТР-П), який стабілізує температуру повітря в системі припливної вентиляції. При відхиленні цієї температури від заданої терморегулятор РТ5 вмикає виконуючий механізм заслінки змішувальною клапана.

Рисунок 6.2. Принципова електрична схема автоматичного управління мікрокліматом в овочесховищі
Заслінка повертається в таке положення, при якому співвідношення рециркуляційного і зовнішнього повітря забезпечує потрібну температуру. Охолодження триває доти, поки температура продукції не досягне заданого значення, після чого регулятор РТ3 вимикає припливний вентилятор.
У період зберігання (перемикач SA2 в положенні X) вентилятор вмикається контактами КТ програмного реле часу для вирівнювання температурних градієнтів у масі продукту. При цьому через контакти КМ4.3 вводяться в дію реле KV2 і терморегулятори PТ1 і РТ3. В подальшому схема працює, як і в режимі охолодження.
Якщо температура в верхній частині сховища (ВК3) стає менше заданої, що може призвести до випадання конденсату, спрацьовує терморегулятор РТ2, який через магнітні пускачі КМ1 і КМ2 вмикає рециркуляційно-опалювальні агрегати. При зниженні зовнішньої температури до 15°С вмикається підігрівник змішувального клапана.
Обладнання «Середовище-1» призначене для автоматичного контролю, вимірювання і регулювання температури в багатосекційних сховищах (до 8 секцій). Система забезпечує управління температурою продукту і повітря в верхній зоні сховища, стабілізацію температури припливного повітря в межах ±20°С. Контроль температури здійснюється в 39 точках сховища.
Датчики температури продукту встановлені на глибині 0,5…0,7 м – по одному датчику для двопозиційного регулятора РМ і для регулятора різниці температур РР і по 3…4 датчика для контролю температури продукту за допомогою логометра Р.
Датчики температури верхньої зони ВКВ встановлені на половині вільної висоти зони – один датчик для логометра Р, а інший – для двопозиційного регулятора РВ, що управляє вмиканням і вимиканням рециркуляційно-опалювальних агрегатів.
Датчики температури ВКВ встановлені в каналі подачі повітря після вентилятора перед розподільними клапанами: один датчик для логометра Р, другий для двопозиційного регулятора РК (вмикання – вимикання вентилятора), третій для регулятора пропорційної дії РП (положення змішувального клапана).
Датчик зовнішньої температури ВКН встановлений на відстані 0,5 м від сховища і захищений від прямої дії сонячних променів. Обладнання функціонує автоматично по сигналам регуляторів або вручну за допомогою магнітних пускачів КМ1…КМ5.
У багатоканальній системі «Середовище-1» (рис. 6.3) відхилення температури від заданої визначається в блоці вимірювань і завдань БВЗ і почергово надходить на терморегулятори. Блоки БРД виконують роль комутаторів двопозиційного (ДПР) і пропорційного (ПР) регуляторів температури.
Електронні реле РЕ1 і РЕ2 перетворюють аналоговий сигнал в цифровий і передають в блоки електромагнітних реле БР1 і БР2. Сигнали з блоків БР1 і БР2 надходять до відповідних блоків управління БУ, які формують сигнали управління виконавчими механізмами ВМ і забезпечують підтримання необхідної температури.
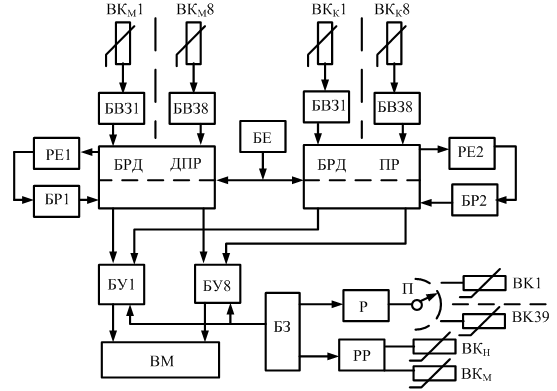
Рисунок. 6.3. Функціональна схема багатоканальної системи управління мікрокліматом «Середовище-1»
Таким чином, блоки БВЗ, РЕ і БР утворюють регулятори з двопозиційним і пропорційними зонами регулювання, а блоки комутаторів БРД ДПР і БРД ПР – синхронний автоматичний перемикач для почергового опитування датчиків. Ними ж здійснюється синхронне почергове підключення виконавчих механізмів для управління температурою у відповідних секціях сховища. Електронний блок БЕ генерує імпульси, які переключають комутатори БРД з заданою періодичністю.
Порівняно із системою ОРТХ обладнання «Середовище-1» має більш широкі функціональні можливості. Крім установок активної вентиляції і опалення, система включає в себе холодильні агрегати, що дає можливість зберігати продукцію протягом усього року.
ЗАПИТАННЯ
1. Назвіть призначення і особливості управління мікрокліматом в овочесховищах. 2. Охарактеризуйте овочесховище як об'єкт автоматичного управління. 3. Поясніть роботу технологічної схеми автоматичного управління температурою в овочесховищі. 4. Яке призначення активної вентиляції в овочесховищах? 5. Від чого залежить режим роботи вентиляційної системи в овочесховищах? 6. Які режими передбачає технологія зберігання картоплі в овочесховищах? 7. З якого основного технологічного обладнання складається установка для підтримання мікроклімату в овочесховищі? 8. Розкажіть про послідовність роботи електричної схеми ШАУ-АВ в періоди охолоджування, лікування і зберігання продукції. 9. Поясніть роботу системи управління мікрокліматом “Середовище” по функціональній схемі.
ТЕСТИ
1. Яка характеристика лікувального періоду для картоплі в овочесховищі?
A. Лікувальний період триває 2 тижні температура картоплі підтримується на рівні +3...4°С, відносна вологість максимальна.
B. Лікувальний період триває 2 тижні температура картоплі підтримується на рівні +14. ..18°С при мінімальному повітрообміні і високій відносній вологості (понад 90%).
C. У лікувальний період температура картоплі знижують до 2 – 4°С зі швидкістю 0,5…0,6°С на добу при тривалості 20 – 25 діб.
2. Яка характеристика періоду охолодження для картоплі в овочесховищі?
A. У період охолодження температуру картоплі знижують до 2 – 4°С зі швидкістю 0,5…0,6°С на добу при максимальній вологості повітря 100 %, тривалість становить 20 – 25 діб.
B. У період охолодження температуру картоплі триває 2 тижні температура картоплі підтримується на рівні +14...18°С.
C. У період охолодження температуру картоплі підтримується на рівні +3...4°С, відносна вологість максимальна.
3. Яка характеристика періоду зберігання для картоплі в овочесховищі?
A. Температуру в об'ємі картоплі в період зберігання знижують до 2 – 4°С зі швидкістю 0,5…0,6°С на добу при тривалості 20 – 25 діб.
B. Температуру в об'ємі картоплі в період зберігання, який триває 2 тижні, підтримують на рівні +14...18°С.
C. Температура в об'ємі картоплі в період зберігання підтримується на рівні +3...4°С, відносна вологість максимальна.
4. Які засоби автоматизації використовуються для автоматичного підтримання температури в овочесховищі?
A. Датчики температури, виконуючий механізм заслінки.
B. Реле часу, терморегулятори.
C. Датчики температури, терморегулятори, реле часу, виконуючий механізм заслінки.
5. Де розміщуються датчики температури в овочесховищі?
A. Датчики температури розміщуються в масі продукції, зовні приміщення, в повітряному каналі і над масою продукції.
B. Датчики температури розміщуються в повітряному каналі і над масою продукції.
C. Датчики температури розміщуються в масі продукції і над масою продукції.
6. Використовуючи принципову електричну схему керування мікрокліматом в овочесховищі поясніть призначення терморегулятора РТ1.
A. Диференційний терморегулятор РТ1 (типу ПТРД-2), контролює температуру продукції.
B. Диференційний терморегулятор РТ1 контролює температуру повітря і вмикає припливну вентиляцію.
C. Диференційний терморегулятор РТ1 (типу ПТРД-2), порівнює температуру продукції і повітря, при різниці температури більше 2 – 3°С вмикає припливну вентиляцію
7. Використовуючи принципову електричну схему керування мікрокліматом в овочесховищі поясніть призначення терморегулятора РТ3.
A. Терморегулятор РТ3 вимикає припливний вентилятор в період охолодження, коли температура продукції перевищить задане значення.
B. Терморегулятор РТ3 вмикає припливний вентилятор в період охолодження, коли температура продукції досягне заданого значення.
C. Терморегулятор РТ3 вмикає припливний вентилятор в період зберігання коли температура продукції впаде нижче заданого значення
8. Для чого використовується реле часу в період зберігання в овочесховищі?
A. Програмне реле часу в період зберігання вимикає вентилятор.
B. Програмне реле часу в період зберігання вимикає заслінку.
C. Програмне реле часу в період зберігання вмикає вентилятор для вирівнювання температурних градієнтів у масі продукту.
9. Для чого використовується виконавчий механізм заслінки в овочесховищі?
A. Виконавчий механізм заслінки в овочесховищі використовується в період зберігання для зменшення температури повітря в системі припливної вентиляції.
B. Виконавчий механізм заслінки в овочесховищі використовується в період охолодження для стабілізації температури повітря в системі припливної вентиляції.
C. Виконавчий механізм заслінки в овочесховищі використовується в період охолодження для збільшення температури повітря в системі припливної вентиляції.
6.2. АВТОМАТИЗАЦІЯ ФРУКТОСХОВИЩ
Автоматизація фруктосховищ. Конструкції фрукто - і овочесховищ мають багато загального. Автоматизація зберігання фруктів викликана необхідністю охолоджування продукту і точної підтримки температури і відносної вологості повітря. Тому в системі автоматизації устаткування фруктосховища передбачено управління повітроохолоджувальними установками, подачею пари для зволоження повітря в камерах і концентрацією газу в газових сховищах.
У приміщеннях для зберігання фруктів (фруктосховищах) концентрацію діоксиду вуглецю підтримують на рівні, істотно вищому, ніж в атмосферному повітрі: 1 % і більш. При цьому зміст кисню зменшується, а азоту збільшується, завдяки чому поліпшуються умови зберігання фруктів. Зміст С02 регулюють, пропускаючи циркуляційне повітря через вапняне молоко або спалюючи газ при контрольованій подачі повітря. Отримана таким чином газова суміш, збагачена також і азотом, охолоджується і подається в сховищі. Температура зберігання, що рекомендується, – менше 50С, але не нижче за температуру підмерзання плодів, яка повинна підтримуватися з високою точністю. Велике значення має також контроль вологості газової суміші, від якої залежить втрата вологи плодами, що зберігаються, і контроль вмісту газу етилену, що виділяється плодами.
Для фруктосховищ, що мають місткість від 1000 до 3000 т розроблений комплект електрообладнання, який забезпечує автоматичне управління мікрокліматом у камерах зберігання фруктів, управління роботою конденсаторного і випаровувального обладнання, захист компресорів охолоджувальних машин та сигналізацію нормальних і аварійних режимів роботи. Один комплект може автоматично управляти двома – чотирма камерами.
Система автоматичного управління мікрокліматом фруктосховища призначена для підтримання в камерах заданих значень температури, вологості повітря, циклічного його перемішування в камерах; вмикання і вимикання установок припливної та витяжної вентиляції, а також для контролю за станом температури і вологості повітря в камерах і окремих точках холодильної установки.
Електрична принципова схема системи управління мікрокліматом у фруктосховищі зображена на рис. 6.4. Напруга на схему подається кнопкою SB6. У разі необхідності можливе відключення всіх агрегатів за допомогою кнопок SB1…SB5, розташованих в різних місцях фруктосховища. За допомогою кнопок SB7, SB8 керують аварійним вентилятором М1 (потужністю 1,5 кВт)
Схема управління температурою і відносною вологістю повітря вмикається автоматом SF1. Перемикач SA1 задає режим роботи системи: ручний (1) або автоматичний (2).
В автоматичному режимі при підвищенні температури в камері спрацьовує терморегулятор Р, який через реле KV1 вмикає електромагнітний аміачний клапан YА1, вентилятори повітроохолоджувальних установок М2, М3 та один з аміачних насосів (М4 або М5) подачі аміаку, як холодоносія в охолоджувальні камери. Коли температура в камері досягає заданого значення, контакти терморегулятора розмикаються і все електрообладнання відключається.
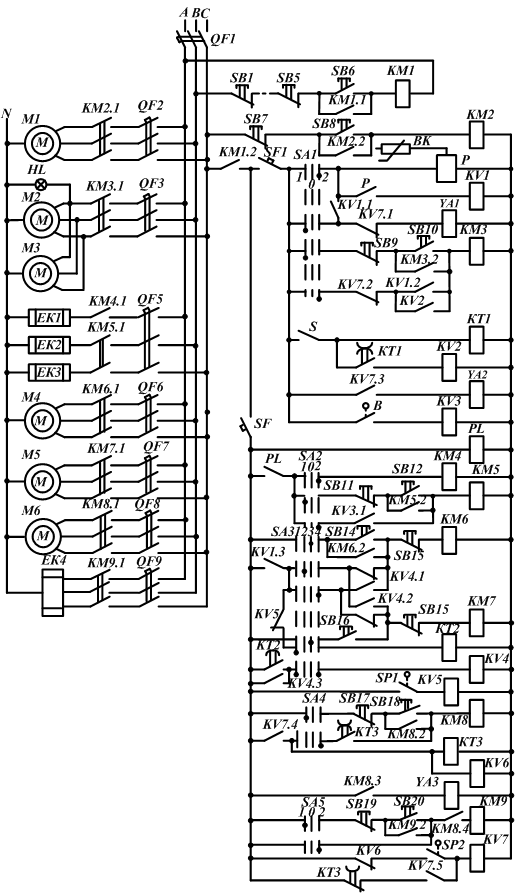
Рисунок. 6.4. Принципова електрична схема автоматичного управління мікрокліматом у фруктосховищі
Режим роботи аміачних насосів встановлюється перемикачем SA3: 1 – Обидва насоси відключені, 2 – Робочий насос М4 (М5 в резерві), 3 – Ручне управління, 4 – Робочий насос М5 (М4 в резерві).
При вдалому запуску насоса спрацьовує датчик тиску SP1, який вмикає проміжне реле KV5. Реле KV5 одним контактом подає напругу на ввімкнення компресорів холодильної установки, а іншим – вимикає реле затримки часу КТ2, призначене для включення резервного насосу.
При невдалому запуску або при зменшенні тиску аміаку в системі робочого насоса датчик SP1 розмикає реле KV5, що призводить до спрацювання реле КТ2. З затримкою 10 с реле КТ2 вмикає реле KV4, яке підключає резервний насос.
Відносна вологість повітря в камері фруктосховища підтримується регулятором вологості В. При пониженні вологості повітря контакти В вмикають реле KV3, яке підключає додаткові секції електропароутворювачів ЕК2 і ЕКЗ. При досягненні заданої вологості подача пару припиняється. Підігрівник ЕК1 ввімкнений для запобігання замерзанню води при низьких зовнішніх температурах.
Схема передбачає захист пароутворювача від «сухого ходу» за допомогою регулятора рівня води PL. При зниженні рівня води регулятор розмикає контакти PL і відключає нагрівник ЕК1…ЕК3.
Для рівномірнішого розподілу волого-температурного поля всередині об’єму камери передбачене циклічне перемішування повітря за допомогою вентиляторів. Режим управління роботою вентиляторів (тривалість роботи і час ввімкнення-вимкнення) забезпечується програмним реле КT1, яке вмикає електродвигуни М2 і М3 вентиляторів.
Системою автоматики передбачене управління процесом видалення льоду (снігової шуби), яка наростає на поверхні охолодників. Режим роботи встановлюють перемикачами SA4 і SA5. В автоматичному режимі наявність «шуби» встановлює реле тиску SP2, яке сприймає різницю в тиску до і після охолодника. При обмерзанні повітропроводів ця різниця збільшується, що призводить до замикання контактів SP2 і спрацювання реле KV7. Реле KV7 своїми контактами відключає магнітний пускач КМ3 вентиляторів охолодників і аміачний клапан YА1. Одночасно воно вмикає електромагнітний клапан YА2 води розморожування, а іншою групою контактів — реле затримки часу КТ3 і реле KV6. Реле KV6 вимикає реле KV7. Із затримкою 3 хв., достатньою для виходу аміаку з охолодника, контактом КТ3 вмикається пускач КМ8, який включає насос М6 води розморожування і електромагнітний клапан виходу води YА3. Магнітний пускач КМ9 вмикає додаткову секцію нагрівників води ЕК4. Через 27 хв. контактом КТ3 насос М6, нагрівник ЕК4 і клапан YА3 вимикаються. Цикл розморожування закінчений і через 3 хвилини (за цей час з охолодника збігає вода) реле KV7 повертається в початкове положення і знову вводить в автоматичну роботу ланки управління аміачним клапаном YА1 і електроприводами М2 і М3 вентиляторів охолодників.
Крім пристроїв управління мікрокліматом в камерах, комплект автоматики містить в собі автоматичні системи управління рівнем аміаку, компресорами; управління повітряною завісою, яка вмикається при відкритті камер, а також прилади контролю, сигналізації і захисту електрообладнання.
ЗАПИТАННЯ
1. Які параметри забезпечує комплект електрообладнання для фруктосховищ? 2. Для чого призначена система автоматичного управління мікрокліматом в фруктосховищі? 3. Поясніть роботу принципової електричної схеми керування мікрокліматом фруктосховища. 4. Які засоби автоматизації використовуються в схемі керування фруктосховищем?
ТЕСТИ
1. Які засоби автоматизації використовуються для підтримання в системі необхідного тиску аміаку фруктосховища?
A. Датчик тиску, вологості.
B. Датчик температури, реле часу.
C. Датчик тиску, реле часу.
2. Які засоби автоматизації використовуються для підтримання мікроклімату в фруктосховищі?
A. Датчик температури з терморегулятором, електроклапан аміаку.
B. Датчик температури з терморегулятором, реле часу.
C. Датчик температури з терморегулятором, електроклапан аміаку, датчик вологості, реле часу.
3. Які засоби автоматизації використовуються для підтримання вологості в фруктосховищі?
A. Датчик вологості, реле часу.
B. Датчик вологості, реле рівня води.
C. Датчик температури, реле рівня води.
4. Використовуючи принципову електричну схему керування мікрокліматом в фруктосховищі поясніть призначення реле часу КТ1.
A. Реле часу КТ1 призначене для циклічного перемішування повітря всередині камери за допомогою електродвигунів М2 і МЗ вентиляторів
B. Реле часу КТ1 призначене для вмикання електроклапана.
C. Реле часу КТ1 призначене для вимикання електродвигунів М2 і МЗ вентиляторів.
5. Для чого використовуються реле часу в схемі керування мікрокліматом в фруктосховищі
A. Для періодичного вмикання з затримкою резервного насоса аміаку та програмного розморожування охолодника.
B. Для періодичного вмикання електродвигунів вентиляторів, з затримкою резервного насоса аміаку та програмного розморожування охолодника.
C. Для періодичного вмикання електродвигунів вентиляторів.
6. Як здійснюється зволоження повітря в фруктосховищі?
A. Вода попадає на електропароутворювач, створюючи пар, який підхоплюється вентилятором і подається на охолодник.
B. Вода попадає на диск, що обертається.
C. Вода розпилюється через форсунки.
7. Які засоби автоматизації використовуються для підтримання тиску аміаку в системі фруктосховища?
A. Реле часу, датчик вологості.
B. Реле часу, датчик тиску.
C. Електроклапани, датчик тиску
8. Які засоби автоматизації використовуються для розморожування “снігової шуби” фруктосховища?
A. Реле часу, датчик різниці тиску, електроклапани.
B. Реле часу, електроклапани.
C. Датчик різниці тиску, електроклапани.
9. Як утворюється “снігова шуба” в фруктосховищі?
A. Повітря за допомогою вентилятора попадає на охолодник, що призводить до обмерзання.
B. Вологе повітря за допомогою вентилятора попадає на охолодник, що призводить до обмерзання.
C. Зовнішнє повітря за допомогою вентилятора попадає на охолодник, що призводить до обмерзання.