Навчальний посібник Автоматизація технологічних процесів і систем автоматичного керування (частина 2)
Навчальний посібник Автоматизація технологічних процесів і систем автоматичного керування (частина 2)
2.2.6. Автоматизація зволожувачів повітря.
Для зволоження та зниження температури повітря тваринницьких і птахівницьких приміщень використовують зволожувачі, що входять в склад вентиляційного обладнання або окреме обладнання зволоження. В комплект вентиляційного обладнання "Клімат-2" входить зволожувач, який розбризкує воду в припливному вентиляторі. При цьому припливне повітря по команді від двохпозиційного регулятора зволожується до необхідних значень. Прикладом самостійного обладнання зволоження може бути обладнання К-П-6. Обладнання К-П-6 в залежності від виконання може комплектуватися 7 – 15 зволожувачами.
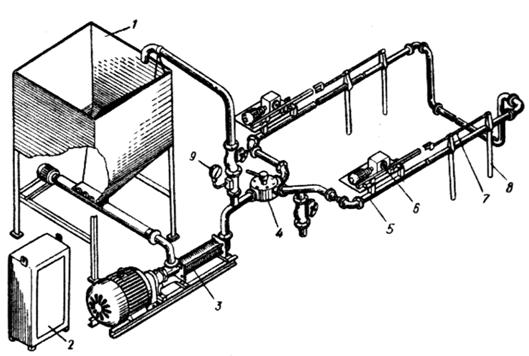
Принцип роботи зволожувача (рис. 2.2.9) такий: вода під тиском заповнює зволожувачі до певного рівня, що регулюється системою зволоження. Електродвигун приводить в рух конус зволожувача. Вода що знаходиться в баці на певному рівні, під дією відцентрової сили піднімається тонкою плівкою по внутрішній поверхні конуса зволожувача і через отвори в конусі розтікається по диску. Дрібні водяні краплі зриваючись з диска і перемішуючись з повітрям, утворюють водяний пил. Уловлювачі крапель служать для збирання великих крапель води та рівномірного радіального поширення зволоженого повітря.
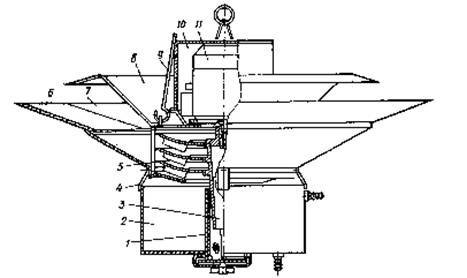
Рис. 2.2.9. Зволожувач: 1 – фільтр; 2 – бак; 3 – конус зволожувача; 4 – водозбірник; 5 – сепаратор; 6 – кришка; 7, 8 – уловлювачі крапель; 9 – гак для підвішування; кожух; 11 – електродвигун.
Принципова електрична схема управління установкою зволоження повітря (рис 2.2.10) передбачає "Ручний" та "Автоматичний" режими керування, які задаються перемикачем SA.
В "Автоматичному" режимі керування управління зволоженням виконується в залежності від величини відносної вологості повітря в приміщенні, яка контролюється датчиком В (гігристорного типу) регулятора вологості А. Так коли вологість повітря в приміщенні нижче уставки спрацювання А, його контакт буде замкнутий, попаде під напругу котушка проміжного реле KV. Замикаючий контакт проміжного реле подасть напругу на котушку реле часу КТ і електромагнітний клапан подачі води Y. В свою чергу замикаючий контакт КТ миттєво замкне коло котушки магнітного пускача КМ, ввімкнуться електродвигуни зволожувачів.
Коли вологість повітря в приміщенні відповідатиме уставці А, його контакт розімкнеться, обезживиться котушка KV. Реле KV обезживить реле часу КТ і електромагнітний клапан Y, припиниться подача води на зволожувачі. З витримкою часу необхідною для видалення залишків води з зволожувачів контакт КТ вимкне магнітний пускач КМ, електродвигуни зволожувачів зупиняться.
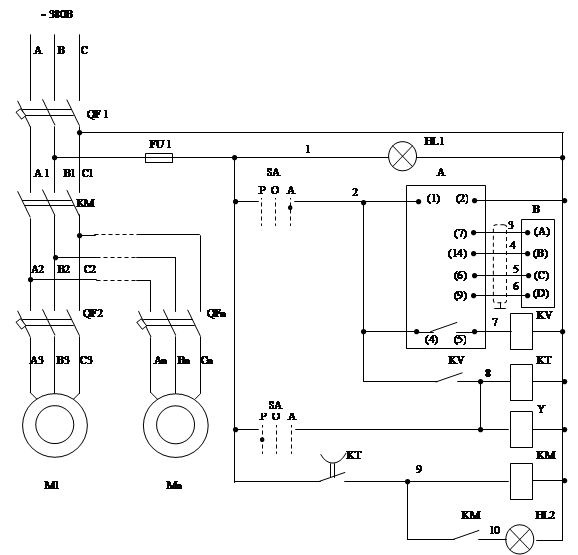 |
Рис. 2.2.10. Принципова електрична схема керування обладнанням зволоження повітря. К-П-6.
В "Ручному" режимі керування зволожувачами виконується не від команд регулятора вологості, а шляхом переведення перемикача SA з положення "О" в положення "Р" і навпаки.
Підготовка установки до роботи та захист силових кіл від коротких замикань здійснюється за допомогою автоматичного вимикача QF1. Автоматичні вимикачі QF2 та QFn забезпечують необхідну кількість працюючих зволожувачів та захищають електродвигуни конкретного зволожувача.. Захист кіл керування при виникненні в них коротких замикань здійснюється запобіжником FU1. Cигналізація про подачу напруги на щит керування та про роботу зволожувачів здійснюється відповідно сигнальними лампами HL1, HL2.
ЗАПИТАННЯ
1. Вкажіть призначення та доцільність використання обладнання для зволоження повітря. 2. Принципи автоматизації зволожувачів повітря. 3.Будова та принцип дії обладнання зволоження К-П-6. 4. Вкажіть засоби автоматизації обладнання зволоження К-П-6.
ТЕСТИ
1. Які засоби автоматизації використовують в типових системах керування установками зволоження повітря?
A. Двохпозиційні регулятори вологості повітря в приміщенні.
B. Безперервні регулятори вологості повітря в приміщеннях.
C. Регулятори температури повітря в приміщенні різних типів.
2. Використовуючи принципову електричну схему обладнання зволоження повітря К-П-6, вкажіть які зміни відбудуться в схемі, якщо вологість повітря в приміщенні буде нижче уставки регулятора вологості А?
A. Регулятор вологості А через реле КV забезпечить включення електромагнітного клапана подачі води Y та електромагнітного пускача КМ включення електродвигунів розбризкувачів.
B. Регулятор вологості А через реле КV забезпечить вимкнення електромагнітного клапана подачі води Y на розбризкувачі.
C. Реле часу КТ забезпечить ввімкнення електродвигунів зволожувачів по добовій часовій програмі.
2. Використовуючи принципову електричну схему обладнання зволоження повітря К-П-6, вкажіть призначення реле часу КТ?
A. Реле часу КТ забезпечить ввімкнення електродвигунів зволожувачів по добовій часовій програмі.
B. Реле часу КТ створює витримку часу на вимкнення магнітного пускача КМ електродвигунів зволожувачів, що необхідна для видалення залишків води з зволожувачів після припинення її подачі.
C. Реле часу КТ створює витримку часу на ввімкнення електромагнітного пускача КМ зволожувачів, щоб уникнути частого вмикання по причині похибок регулятора вологості А.
2.2.7. Автоматизація інкубаторів.
Вирішення загальних питань підтримання мікроклімату в птахівництві мають аналогічні рішення подібних питань в тваринництві, але є деякі специфічні особливості регулювання мікроклімату зокрема при інкубації яєць. Основними параметрами, які характеризують оптимальні умови інкубації, є температура повітряного середовища, його вологість, газовий склад та швидкість переміщення повітря. Оптимальні значення вказаних параметрів мікроклімату визначенні на основі аналізу природних умов та в результаті експериментальних досліджень. Так при інкубації яєць курей оптимальними вважають температуру 37 - 38ºС, Відносне значення вологості 70% , швидкість переміщення повітря в інкубаторі 0,5 – 1,6 М/сек. Експерементальні дослідження показують, що для відповідного періоду інкубації рекомендуються свої оптимальні значення параметрів мікроклімату.
Для інкубації яєць на птахофабриках використовують інкубатори "Універсал-55" і ИКП-90 "Кавказ". Вони мають уніфіковані пристрої регулювання кліматичних режимів інкубації і керування поворотом лотків в інкубаційних камерах. Вивідні камери, що комплектуються на три і шість інкубаторів, не мають повороту лотків. В іншому пристрій інкубаційних і вивідних камер аналогічний.
Інкубатор «Універсал-55» складається з трьох інкубаційних і однієї вивідної камери. Камери інкубатора обладнані однаковими приладами для відтворення й автоматичної підтримки заданого режиму. В інкубаційних камерах лотки з яйцями встановлюються в поворотних барабанах, змонтованих на валу. У вивідній камері яйця укладаються в нерухомі лотки, розташовані горизонтально.
Система автоматичного керування інкубатора дозволяє виконувати наступні операції без участі людини: автоматичний поворот лотків з яйцями щогодини в інкубаційних камерах шляхом нахилу барабана на 45° в обидва боки від вертикального положення; автоматичне регулювання температури в камері інкубатора в діапазоні 36...39°C З точністю ±0,2 °С; автоматичне регулювання відносної вологості в камері в діапазоні 40...75% з точністю ±3;%; аварійне вимикання регулятора температури з одночасним вмиканням охолодження при підвищенні температури в камері до максимально припустимого значення, а також при несправності елементів схеми пуску вентилятора; звукову сигналізацію при перевищенні максимально допустимого значення температури в камері й аварійному вимиканні напруги в мережі; світлову сигналізацію в процесах регулювання температури і вологості в камері; світлову сигналізацію, що дублює звукову; електричне блокування, що виключає можливість вмикання електроустаткування камери при відкритих дверях камери.
Роботою інкубатора керують за допомогою пультів керування, розташованих на кожній інкубаційній камері і загального програмного пристрою.
На рисунку 2.2.11 зображена інкубаційна камера, обладнана вентилятором 1, що забезпечує вирівнювання температури по об’єму камери і поліпшує теплопередачу між повітрям і яйцем. Двома електронагрівниками 2 потужністю по 1 кВт керують спільно в двох режимах: на повній напрузі мережі і на половинному через тиристор. Зволожувач 7 має окремий електропривод. Вода в системі зволоження подається через електромагнітний клапан 6. Припливна 8 і витяжна 5 заслінки повітрообміну спарені і керуються електромагнітним соленоїдним приводом 4. Для повороту лотків призначений механізм 3 з електроприводом 5, що має два обмежувальних кінцеві вимикачі 10.
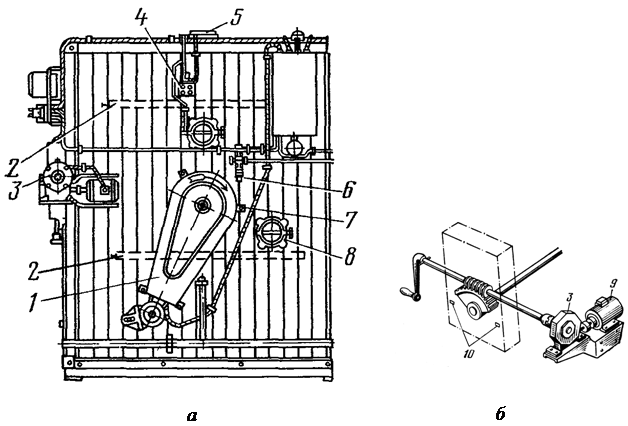
Рис. 2.2.11. Інкубаційна камера; а – вид на задню стінку; б – механізм повороту лотків
Принципова електрична схема інкубаційної камери інкубатора «Універсал-55» показана на рисунку 2.2.12. В автоматичному режимі температурним режимом керують за допомогою трипозиційного терморегулятора AL типу РТИ-3. При зниженні температури в камері терморегулятор AL посилає сигнал на відкриття тиристора VS. При цьому напруга живлення зворотної послідовності, дорівнює половині номінальної і надходить на обігрівальні елементи ЕК1 і ЕК2. При подальшому зниженні температури терморегулятор AL подає напругу на котушку магнітного пускача КМ2, що своїми контактами шунтує тиристор і подає на нагрівальні елементи повну напругу. При підвищенні температури в камері спочатку вимикається КМ2, а потім посилається сигнал на закривання тиристора.
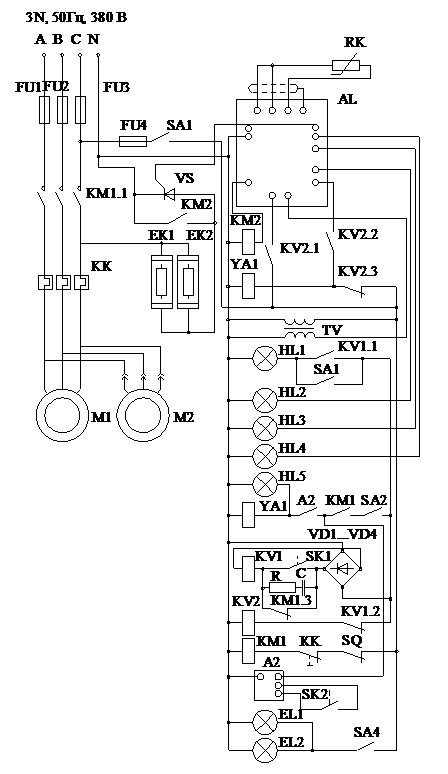
Рис. 2.2.12. Принципова електрична схема інкубатора "Універсал-55".
Якщо температура перевищить 38,3 °С, замкнеться контакт термореле SK1 і ввімкне реле KV1, що вимкне проміжне реле KV2. Контакти реле KV2 вимикають терморегулятор AL, а вмикають соленоїд охолодження YA1 і світлову і звукову аварійну сигналізацію, а також місцеву світлову НL1.
При зниженні вологості повітря (на 3%) регулятор вологості А2, вмикає соленоїд YA2 і подає воду на диск розпилювача М2. При цьому запалюється сигнальна лампи НL 7. Світлова сигналізація НL4 показує "Розігрів", НL3 –"Температура в нормі", НL2 – "Охолодження". Вентилятор M1 вмикається магнітним пускачем КМ1 при подачі напруги на коло керування і вимикається тільки при відкриванні дверей кінцевим вимикачем SQ.
Автоматичне керування дублюється ручним, яке здійснюється вимикачами SA1-SA3.
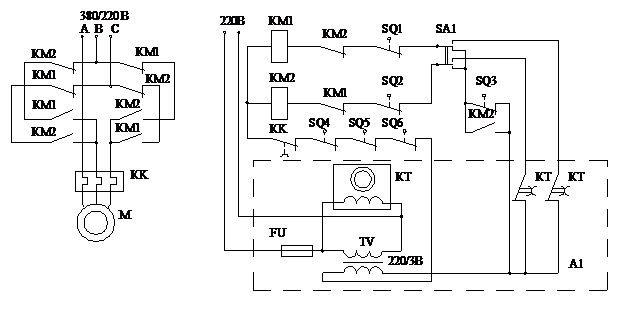
Рисунок 2.2.13. Принципова схема керування поворотом лотків інкубатора
Керування поворотом лотків виконується командним пристроєм, схема якого зображена на рисунку 2.2.13. Режим керування поворотом лотків встановлюється перемикачем SA1. У положенні перемикача "Автоматичний поворот" напруга 36 В подається з вторинної обмотки трансформатора TV командного пристрою А1 через контакти реле часу КТ На котушки електромагнітних пускачів КМ1 чи КМ2. Стан контактів міняється через кожну годину. У ланцюг котушок реверсивного магнітного пускача КМ1, КМ2 включені кінцеві вимикачі SQ1 і SQ2, що вимикають електродвигун повороту лотків М1 в крайніх положеннях рухливого сектора.
У загальний ланцюг котушок пускачів КМ1, КМ2 включені кінцеві вимикачі SQ4...SQ6, контакти яких замкнуті тільки при закритих замках барабанів.
Для установки лотків у горизонтальне положення тумблер SA1 ставиться в положення "Горизонтально" (на схемі це нижнє положення перемикача). При цьому напруга від командного пристрою подається незалежно від стану контактів реле часу КТ, а в ланцюг котушок пускачів включений кінцевий вимикач SQ3, установлений на середньому виступі передньої опори. Кінцевий вимикач SQ3 вимикає механізм повороту при горизонтальному положенні лотків.
Передбачений також ручний привод механізму повороту лотків. Установка лотків вертикально (положення обслуговування) може проводитися механічно від спеціального перемикача і вручну. Випадання лотків при нахилі барабанів запобігається спеціальними замками.
ЗАПИТАННЯ
1. Для чого призначений інкубатор «Універсал-55»? 2. З якого основного обладнання складаються інкубатори? 3. Які функції виконує автоматизована система управління інкубатора «Універсал-55»? 4. Які засоби автоматизації використовуються в інкубаторі «Універсал-55»? 5 Як здійснюється поворот лотків в інкубаторі?
ТЕСТИ
1. Який пристрій використовується для автоматичного вмикання пристрою повороту лотків інкубатора «Універсал-55» ?
A. Кінцеві вимикачі
B. Реле температури
C. Реле часу
2. Використовуючи принципіальну електричну схему керування поворотом лотків інкубатора «Універсал-55» вкажіть для чого використовується кінцеві вимикачі SQ1 і SQ2?
A. Вимикають електродвигун повороту М в крайніх положеннях рухливого сектора.
B. Вмикають електродвигун повороту М в крайніх положеннях рухливого сектора.
C. Вимикають механізм повороту при горизонтальному положенні лотків
3. За допомогою чого здійснюється керування температурним режимом інкубаторі «Універсал-55»
A. Двохпозиційним терморегулятором
B. Трипозиційним терморегулятором типу РТИ-3
C. Терморегулятором
4. Використовуючи принципіальну електричну схему інкубатора «Універсал-55» вкажіть для чого використовується термореле SK1?
A. При перевищені температури 38,3 °С, замкнеться контакт термореле SK1 і ввімкне реле KV1, що вимкне проміжне реле KV2, а воно вимикає терморегулятор AL, і вмикає соленоїд охолодження YA1
B. При перевищені температури 39,3 °С, замкнеться контакт термореле SK1 і вмикає соленоїд охолодження YA1
C. При перевищені температури 40,3 °С, замкнеться контакт термореле SK1 і вимикає терморегулятор AL.
5. Використовуючи принципіальну електричну схему інкубатора «Універсал-55» вкажіть для чого використовується вологорегулятор А2?
A. При зниженні вологості повітря на 13% вологорегулятор А2, вмикає соленоїд YA2
B. При зниженні вологості повітря (на 23%) вологорегулятор А2, подає воду на диск розпилювача М2
C. При зниженні вологості повітря (на 3%) вологорегулятор А2, вмикає соленоїд YA2 і подає воду на диск розпилювача М2
6. Використовуючи принципіальну електричну схему інкубатора «Універсал-55» вкажіть для чого використовується соленоїд YA2?
A. Соленоїд YA2 подає воду на диск розпилювача М2
B. Соленоїд YA2 подає воду на заслінку.
C. Соленоїд YA2 відкриває заслінку.
7. Використовуючи принципіальну електричну схему інкубатора «Універсал-55» вкажіть для чого використовується соленоїд YA1?
A. Подає воду на диск розпилювача М2 при перевищені температури в камері.
B. Відкриває заслінку охолодження при перевищені температури в камері.
C. Подає воду на диск розпилювача М2 при зниженні температури в камері.
2.2.8. Автоматизація іонізації повітря
Повітря, що оточує нас, містить нейтральні атоми, молекули й іони газів, що входять у його склад. Іони повітря, чи аероіони, як прийнято їх називати, утворяться внаслідок приєднання електронів нейтральними атомами і молекулами чи газів віддачі ними електронів, здобуваючи при цьому негативний чи позитивний заряд.
Встановлено, що негативні аероіони впливають на тварин, стимулюючи біологічні процеси, що ведуть до підвищення продуктивності і схоронності поголів'я. Природна іонізація повітря відбувається за рахунок дії радіоактивних речовин, що знаходяться в ґрунті і повітрі, а також під впливом космічних променів.
Знижений зміст негативних аероіонів у повітрі тваринницьких ферм внаслідок дії екрану огороджень, і різного устаткування, з підвищеною вологістю і запиленістю повітря, що сприяють об'єднанню газових іонів із дрібними рідкими чи твердими частками й утворенню важких іонів. Видихуване тваринами повітря містить також важкі іони, серед яких переважають позитивно заряджені. У цілому це несприятливо відбивається на фізіологічному стані тварин. Тому в приміщеннях необхідно постійно підтримувати визначену концентрацію негативних аероіонів, штучно іонізуючи нейтральні частки повітря.
Устаткування, застосовуване для аероіонізаціі тваринницьких і птахівницьких приміщень, повинне поповнювати повітряне середовище в зоні перебування тварин і птахів тільки легкими негативними іонами в потрібній кількості і не мати який-небудь негативний побічний вплив на них, а також обслуговуючий персонал. У більшій мірі цим вимогам відповідають електричні аероіонізатори, що використовують коронний розряд.
Автоматизація систем іонізації повітря дозволяє створити й підтримувати оптимальні умови повітряного середовища у тваринницьких і птахівницьких приміщеннях. У результаті застосування автоматизації систем іонізації повітря підвищується продуктивність тварин, скорочуються витрати ручної праці і зменшується витрата електричної й теплової енергій.
Іонізатор ИЭ-1 призначений для іонізації повітря в тваринницьких приміщеннях з подачею іонів в вентиляційну систему.
Установки містять у собі вентилятор, систему повітропроводів, іонізаційні приставки і пульт керування. Одна з таких приставок зображена на рис. 2.2.14. Приставка виконана з органічного скла і складається з джерела випромінювань, іонної і повітряної камер, та електрода.
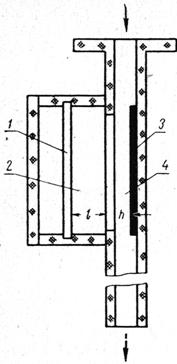
Рис. 2.2.14 1 - джерело а- частинок; 2 – іонна камера; 3 – сепаруючий електрод; 4 – повітропровід.
.
В іонній камері розташовується джерело А-часток 4л9-35 із плутонієм 239. Джерело являє собою металеву пластинку діаметром 71 мм, з однієї сторони якої нанесений плутоній з емалевим покриттям. При діаметрі активного шару 71 мм джерело виділяє щосекунди 3,5-105 А-Часток, що являють собою ядра гелію і мають дуже невеликою проникаючою здатність. Випускаються ізотопом плутонієм А-частки при гальмуванні в металі пробігають усього кілька десятків мікронів, а в повітрі 3—3,5 см. При цьому енергія розпаду перетворюється в тепло в масі самого ізотопу, а випромінювання не виходить за межі оболонки, у яку він укладений. Тому при використанні А-радіоактивного ізотопу не потрібна спеціальний захист від випромінювань.
На принциповій схемі видно, що напруга на установку подається автоматичним вимикачем.
Установка має два режими роботи: ручне і автоматичне, які задаються за допомогою перемикача SА; в положенні “А” – автоматичне, в положенні “Р” – ручне.
В автоматичному режимі перемикач встановлюємо в положення А, при цьому напруга подається на реле часу КТ, яке має свій контакт з затримкою на замикання і розмикання в колі котушки магнітного пускача КМ. Магнітний пускач своїми силовими контактами подає напругу на електродвигун припливного вентилятора, а додатковими контактами на сигнальну лампу НL і високовольтний трансформатор ТV. Трансформатор ТV підвищує напругу 220В до величини 5000В, а діодний міст перетворює на напругу постійного струму для подачі до іонізаційної приставки ГИ, що знаходиться біля повітропроводу.
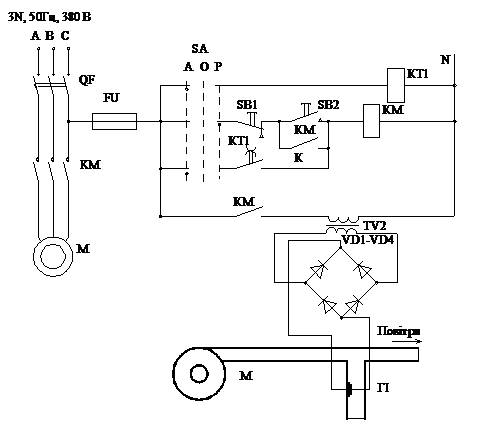
Рис. 2.2.15. Принципова електрична схема іонізаційної установки.
Вимикається установка в автоматичному режимі за допомогою контакту реле часу КТ по закінчені заданої програми іонізації повітря.
В ручному режимі перемикач встановлюємо в положення "Р”, при цьому кнопкою SВ2 “Пуск” ми подаємо напругу на котушку магнітного пускача КМ, який вмикає електродвигун вентилятора та іонізаційну приставку. Вимикається установка в ручному режимі кнопкою SВ1 “Стоп”.
Захист кола керування здійснюється за допомогою запобіжника FU.
2.2.9. Автоматизація мікроклімату з використанням програмних контролерів.
Автоматизована система вимірювання температури в пташнику «Каштан-Т» призначена для вимірювання температури в пташинку і зовнішнього повітря. Результати багатоканальних вимірювань висвітлюються цифровими індикаторами, а також можуть реєструватися на папері за допомогою цифродрукуючого пристрою один раз за 1, 2, 4 або 8 год. послідовно у всіх пташниках. На запит оператора можна проконтролювати температуру в будь-якому пташнику.
До складу системи входять: нормуючі перетворювачі з датчиками температури типу ТСМ — для перетворення вихідної величини датчика температури — опору на струм блока живлення, стіл оператора з панеллю керування та електронним блоком, цифродрукуючий пристрій, два адаптери, кабель. Конструктивно вона виконана у вигляді центрального електронного пристрою та периферійних вимірювальних перетворювачів.
Технічна характеристика системи «Каштан-Т».
Кількість пташників, в яких контролюють температуру повітря, - 50шт. Діапазон вимірювання температури повітря в пташнику, -0..+40°С. Кількість точок вимірювання температури з зовнішнього повітря - 1шт. Діапазон вимірювання температури зовнішнього повітря, —40...+40°С. Основна абсолютна похибка вимірювання температури повітря - 1°С. Споживана потужність при напрузі 220 В і частоті 50 Гц, -100Вт.
Контроллер для систем припливної вентиляції з водяним калорифером ТРМ 133 Має 7 універсальних входів, до яких можна підключати датчики різних типів:
Термометри опору типів ТСП 50П/ 100П/500П/1000П, ТСМ 50М/100М, ТСН 100Н/1000Н; термопари TXK(L), ТХА(К); датчики з уніфікованим вихідним сигналом струму 0...5 мА, 0(4)...20 мА або напруги 0...1 В; датчики положення заслінки (резистівні або струмові).
Універсальні входи використовуються для вимірювання (рис 2.2.16): Тз - температури зовнішнього повітря; Тпр – температури припливного повітря; Тзв - температури зворотної води в контурі теплоносія; Тк1 – температури в приміщені; Тк2 - температура приміщення в іншому місці (або для підключення задатчика температури); Дпз - положення заслінки; Двл - вологості (вхід з вбудованим шунтуючим резистором 100 Ом для прямого підключення датчика із струмовим виходом).
Сучасний ефективний алгоритм автонастройки ПІД-регулятора. При автонастройці прилад обчислює оптимальні для даного об'єкту значення коефіцієнтів ПІД-регулюваня. Подальше нескладне ручне підстроювання дозволяє звести до мінімуму перерегулювання.
Контроллер має 6 дискретних входів для діагностики справності системи вентиляції і перемикання режимів.
 Рис 2.2.16. Функціональна схема контролера припливної вентиляції ТРМ 133.
Рис 2.2.16. Функціональна схема контролера припливної вентиляції ТРМ 133.
С1 - комутуючий пристрій (таймер, тумблер і т. п.) для дистанційного переходу системи в черговий режим;
С2 - датчик контролю справності припливного вентилятора по потоку повітря;
СЗ - датчик контролю засмічення фільтру припливного вентилятора (витяжного);
С4 - датчик переходу системи в режим захисту калорифера від замерзання;
С5 - датчик пожежної сигналізації;
С6 - датчик контролю справності витяжного вентилятора.
Виходи контролера використовуються для управління вентилятором, жалюзі, калорифером і аварійною сигналізацією. ТРМ133 оснащений наступними вбудованими вихідними елементами: 4 електромагнітних релез комутуємим струмом 4 А при 220 В для управління жалюзі, вентилятором приточування, КЗР і пристроями аварійної сигналізації; 2 ЦАП 4...20 мА або 0...10 В для управління аналоговим КЗР. При цьому ТРМ133 може управляти засувками як з датчиком положення, так і без нього (по математичній моделі, закладеній в прилад).
ТРМ 133 здійснює автоматичний вибір режимів роботи системи припливної вентиляції : підтримка температури повітря приточування (ПІД-регулюваня); прогрів калорифера при запуску системи і при перемиканні режимів; день/ніч (по вбудованому годиннику реального часу); черговий режим (перемикання вручну або по повідомленню про аварію); захист калорифера від замерзання; захист системи від перевищення температури зворотної води по графіку; літній режим.
Завдяки використанню в ТРМ133 ПІД-закону регулювання досягається висока точність підтримки температури припливного повітря і зворотної води. Високу точність забезпечує також сучасний алгоритм автонастройки приладу на об'єкті. Крім того, в ТРМ 133 використовуються декілька контурів ПІД-регулюваня, що дозволяє гнучко настроювати прилад для роботи в різних режимах.
Високу перешкодозахисну безпеку і надійність роботи системи вентиляції під управлінням ТРМ 133 забезпечують: цифрова фільтрація аналогових входів і захист від «брязкоту» дискретних входів; імпульсний широкодіапазонний блок живлення, стабілізуючий параметри контроллера; докладна діагностика справності вузлів системи вентиляції і вимірювальних датчиків з видачею аварійних повідомлень на дисплей; наявність режиму “черговий”, в який система переводиться у разі аварії (наприклад, при пожежі).
Крім того, всі основні вузли ТРМ 133 - блок живлення, входи, виходи і модуль інтерфейсу RS-485 - мають високовольтну гальванічну ізоляцію один від одного.
У ТРМ 133 встановлений модуль інтерфейсу RS-485, організований по стандартному протоколу ОВЕН. Інтерфейс RS-485 дозволяє: конфігурувати прилад на ПК; передавати в мережу поточні значення виміряємих величин, вихідної потужності регулятора, а також будь-яких програмованих параметрів; одержувати з мережі оперативні дані для генерації управляючих сигналів. ТРМ 133 може працювати в мережі тільки за наявності в ній «майстра», функцію якого може виконувати, наприклад, персональний комп'ютер.
Підключення ТРМ 133 до ПК здійснюється через адаптер ОВЕН АСЗ-м або АС4 (рис 2.2. 17).
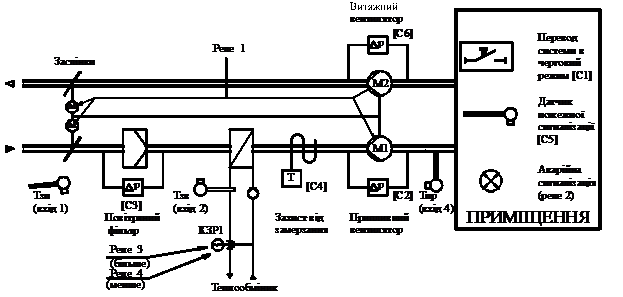 Рис 2.2.17. Приклад використання контролера припливної вентиляції ТРМ 133.
Рис 2.2.17. Приклад використання контролера припливної вентиляції ТРМ 133.
При інтеграції ТРМ 133 в АСУ ТП як програмне забезпечення можна використовувати SCADA-систему Owen Process Manager або яку-небудь іншу програму.
Режими роботи контролера.
Регулювання температури припливного повітря в системі з водяним калорифером. Це основний режим роботи ТРМ133. При вході в цей режим прилад відкриває жалюзі і включає припливний вентилятор (рис 2.2.18).
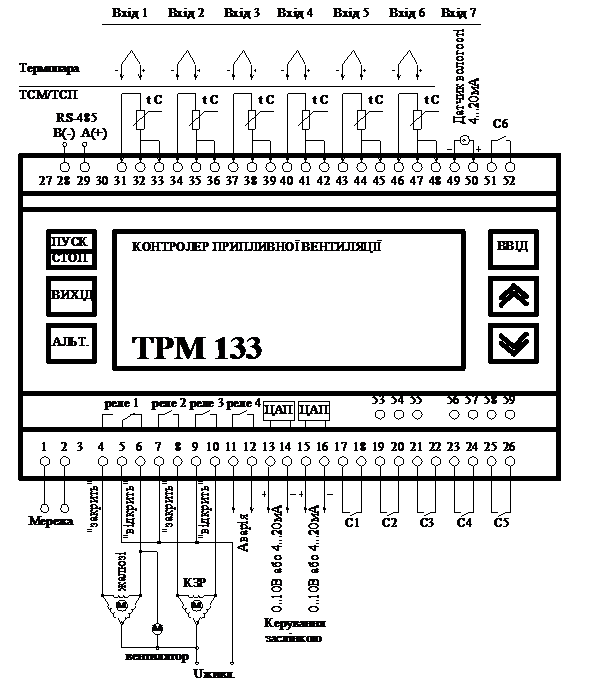
Рис 2.2.18. Схема підключень контролера припливної вентиляції ТРМ 133.
Нагрів припливного повітря. ТРМ133 забезпечує підтримку на заданому рівні температури повітря припливного Тпр за допомогою калорифера. Для цього прилад управляє положенням K3Р, який регулює потік теплоносія, що подається в калорифер.
Прогрів калорифера. Контролер здійснює прогрівання калорифера перед початком роботи, а також після виходу з режимів: ЧЕРГОВОГО, ЛІТНЬОГО або ЗАХИСТУ ВІД ЗАМЕРЗАННЯ. Час прогрівання визначається користувачем, виходячи з експлуатаційних параметрів системи. Для забезпечення максимальної циркуляції теплоносія через калорифер ТРМ формує команду на повне відкриття КЗР. Вентилятор при цьому вимкнений, жалюзі закриті.
Захист від перевищення температури зворотної води, що повертається в теплоцентраль здійснюється залежно від температури зовнішнього повітря відповідно до графіка. Графік зворотної води задається користувачем. Якщо температура ТЗВ, виміряна датчиком, перевищує Тзв. мах. прилад перериває управління КЗР по Тпр. і переходить на управління по сигналу розузгодження між поточним значенням Тзв. і обчисленим по графіку Tзв. гр. Після повернення Тзв. в допустимі межі регулювання продовжується по Тпр.
Захист від замерзання води в калорифері. Замерзання води в калорифері загрожує руйнуванням всієї системи. Тому при падінні температури зворотної води Тзв або температури припливного повітря Тпр. нижче за критичні значення ТРМ133 переводить систему в режим “Захисту від замерзання води в калорифері”. Для максимально швидкого підвищення температури ТРМ формує команду на виключення вентилятора, закриття жалюзі і повне відкриття КЗР. Контролер переводить систему в режим “Захисту від замерзання” також при виникненні несправності будь-якого з вхідних датчиків (обрив, коротке замикання) і при спрацьовуванні контактного датчика С4.
Режими ДЕНЬ/НІЧ - перемикання по годиннику реального часу. Для підтримки комфортної температури в приміщенні в денний час і зниження її після закінчення робочого дня (в цілях економії енергії) кониролер автоматично перемикає режими ДЕНЬ/НІЧ. Перемикання відбувається по вбудованому годиннику реального часу. При програмуванні задаються дві уставки Тпр - денна і нічна, а також час початку і закінчення робочого дня.
Літній режим. Це економічний режим, оскільки регулювання температури припливного повітря не відбувається. КЗР в цьому режимі повністю закритий і циркуляція води через калорифер припинена. Здійснюється тільки вентиляція приміщення (жалюзі відкриті, вентилятор включений) і діагноста обладнання. ТРМ133 автоматично переводить систему в “Літній режим”, коли температура зовнішнього повітря Тз. стає вище за значення Т вст. літ, заданого при програмуванні приладу. Поріг для відключення “Літнього режиму” також задається користувачем.
Черговий режим. “Черговий режим” передбачений для випадків, коли в роботі вентиляції немає необхідності (нічний час доби, вихідні дні і т. п.). У цьому режимі ТРМ133 закриває жалюзі, вимикає вентилятор і контролює тільки температуру зворотної води по графіку. Перехід в “Черговий режим” здійснюється: дистанційно за допомогою зовнішнього комутуючого пристрою С1; по аварійному повідомленню від датчика контролю справності вентилятора С2 або пожежної сигналізації С5; установкою відповідного програмованого параметра (з клавіатури приладу або з ПК).
ЗАПИТАННЯ
1. Як впливають негативні аероіони на тварин? 2. Для чого призначений іонізатор ИЭ-1? 3. Для чого призначена автоматизована система «Каштан-Т»? 4. Які режими має контролер ТРМ133?. 5. Як здійснюється надійність і безпека роботи системи припливної вентиляції контролером ТРМ133?
ТЕСТИ
1. Який автоматичний пристрій використовується для керування іонізатором ИЭ-1?
А. Програмне реле часу
В. Терморегулятор
С. Реле часу
2. Для чого призначена автоматизована система вимірювання температури в пташнику «Каштан-Т»?
A. Призначена для вимірювання температури в пташинку і зовнішнього повітря та показу вимірювань на цифрових індикаторах, реєстрація на папері за допомогою цифродрукуючого пристрою один раз за 1, 2, 4 або 8 год. послідовно у всіх пташниках.
B. Призначена для вимірювання температури в пташинку і зовнішнього повітря в всіх пташниках.
C. Призначена для показу вимірювань на цифрових індикаторах, реєстрація на папері за допомогою цифродрукуючого пристрою один раз за 1, 2, 4 або 8 год. послідовно у всіх пташниках.
3. Які пристрої використовуються для вимірювання температури в автоматизованій системі вимірювання температури в пташнику «Каштан-Т»?
A. Нормуючі перетворювачі
B. Нормуючі перетворювачі з датчиками температури типу ТСМ
С Датчики температури типу ТСМ
4. Для чого призначені дискретні входи контролера ТРМ133?
А. Для підключення датчиків контроля справності припливного повітря, пожежної сигналізації.
В. Для перемикання режимів роботи.
С. Для прогріву калорифера.
2.3. АВТОМАТИЗАЦІЯ ГОДУВАННЯ ТА НАПУВАННЯ
ТВАРИН І ПТАХІВ
2.3.1. Автоматизація годування тварин і птахів.
Процес роздачі кормів є одним із трудомістких на тваринницьких та птахівницьких фермах. Технологія роздачі кормів знаходиться в тісному зв'язку з загальним технологічним циклом, прийнятим на фермі. Головною умовою оптимальності годування тварин є збалансованість кормів і необхідна періодичність та дозованість їх видачі. Виходячи з цього до кормороздавальних пристроїв пред’являються такі вимоги: рівномірність роздачі корму в годівниці з відхиленням маси від норми з розрахунку на одну голову не більше 10%; втрати корму не більше 3%; тривалість роздачі корму не більше 30 хв. для мобільних і 20 хв. для стаціонарних кормороздавачів; можливість регулювання норми корму від максимального до мінімального значення.
Потребу в кормороздавальних пристроях, їх марку та кількість визначають з урахуванням виду та віку тварин і птахів, способів їх утримання, раціонів годування, норм видачі корму одній тварині, розрахункового поголів’я тварин. Для роздачі корму на фермах використовують, як мобільні, обмежено-мобільні і стаціонарні кормороздавачі.
Зараз одержали поширення два основних види годівлі тварин та птахів - ненормоване і нормоване. У ненормованому випадку кількість корму не нормується, а в другому кожній тварині та птахові в залежності від його продуктивності і деяких інших факторів видається визначена індивідуальна роздача корму. Найчастіше з метою спрощення технології годівлі на фермах застосовують групове нормування, коли кормовий раціон розраховують, виходячи з потреб середньої групи тварини чи птахів.
На великих тваринницьких комплексах з характерними для них сучасної машинної технології і потоковістю виробництва виникає нагальна потреба застосування автоматизованих систем керування, що дозволяють найбільше повно й ефективно використовувати устаткування, значно знизити трудові витрати і вартість продукції, збільшити продуктивність і поліпшити умови праці.
У таких системах як правило відбувається об'єднання декількох технологічних операцій у загальну потокову лінію з місцевим, дистанційним та автоматизованим керуванням електроприводами машин і механізмів. Найчастіше спільно проектуються лінії транспортування і роздачі кормів. Системи автоматизації повинні забезпечувати послідовність автоматичного і ручного включення машин і механізмі в порядку, зворотному напрямку руху корму, щоб виключити завал машини, зупинку потокової лінії в заданій послідовності у випадку аварійної зупинки однієї з машин; контроль і сигналізацію роботи всіх машин і механізмів.
Кормороздача на фермах ВРХ обумовлюється в основному раціоном годування та способом утримання тварин.
Кормороздавачі типу РВК-Ф-74, ТВК-80, КЛО-75 відносяться до стаціонарних і призначені для роздавання всіх видів кормів (крім концентрованих і рідких) в умовах прив’язного утримання тварин з розподілом кормів вздовж кормового жолоба рухомою стрічкою чи пластинчастим транспортером. Вони відрізняються між собою будовою розподільного транспортера та конструкцією приводної станції.
Роздавач всередині годівниці РВК-Ф-74 (рисунок 2.3.1) призначений для роздавання зелених, грубих і соковитих кормів та кормових сумішей при утриманні корів на прив'язі. Він являє собою ряди годівниць, всередині яких змонтовано транспортер. Транспортер-кормороздавач складається з годівниць, завантажувальний бункер, приводної станції, стрічкового транспортера.
Привод складається із рами на якій розміщено приводна. Передача крутного моменту на ведучий вал приводу стрічкового транспортера від приводної станції здійснюється через ланцюгову передачу. Робочий орган, являє собою стрічку з прикріпленим до неї канатом і круглоланковим ланцюгом.
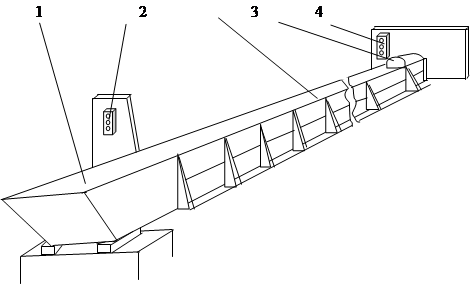
Рисунок 2.3.1. Технологічна схема кормороздавача РВК-Ф-74: 1 – завантажувальний бункер; 2 – кнопковий пост; 3 – годівниця; 4 – привід.
Процес роботи виконуються таким чином. мобільним роздавачем корм завантажується в завантажувальний бункер. Приведення в рух стрічкового транспортера забезпечує переміщення корму вздовж годівниці. При досягненні стрічки з кормом кінця фронту кормороздачі транспортер зупиняється. Перед початком наступної годівлі, при зворотному русі стрічкового транспортера, виконується очищення стрічки від залишків корму, які скидаються в приямок. При досягненні робочого органа вихідного положення привод зупиняється.
Принципова електрична схема кормороздавача РВК-Ф-74 зображена на рисунку 2.3.2. Ввідним апаратом щита керування кормороздавача є автоматичний вимикач QF1, який також забезпечує захист електродвигуна від коротких замикань. Принципова електрична схема керування кормороздавачем передбачає управління реверсивним електродвигуном переміщення робочого органа за допомогою кнопкових постів SB1, SB2 з двох місць в режимі роздачі корму та видалення відходів. В схемі передбачено включення звукового сигналу HA про початок роздачі корму та видалення відходів. Тобто кнопковим постом спочатку вмикається реле часу КТ1 чи КТ2, які забезпечують витримку часу на включення електродвигуна переміщення після подачі звукового сигналу. Зупинка двигуна переміщення робочого органа при роздачі корму та видалені відходів виконується автоматично кінцевими вимикачами SQ1 та SQ2.
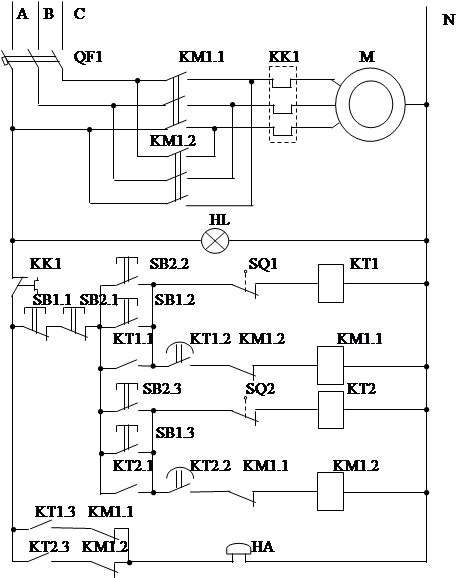
Рисунок 2.3.2. Принципова електрична схема кормороздавача РВК-Ф-74.
Захист електродвигуна від перевантажень здійснюється тепловим струмовим реле КК1. Про подачу напруги на шафу керування сигналізує лампа HL.
Автоматизована потокова лінія роздачі кормів ТВК-80Б призначена для роздавання всіх видів кормів (крім концентрованих і рідких) в умовах прив’язного утримання тварин. Він являє собою рухому стрічку, (рис. 2.3.3) у годівницях 4, що приводитися в дію реверсивним електроприводом 5. При русі вперед стрічка несе до місця стійла тварин визначене, завантажене живильником 1 визначену кількість корму. Як живильник може бути використаний кормороздавач КТУ-10, що має накопичувальну ємність 2. З поверненням стрічки (реверс) годівниці самоочищаються від залишків корму, що віддаляється з приміщення транспортером 6.
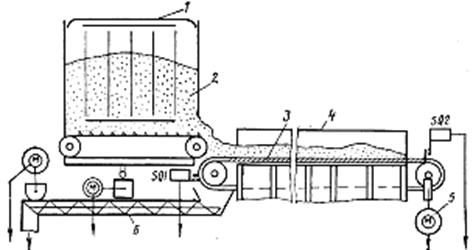
Рис. 2.3.3. Технологічна схема транспортера - кормороздавача ТВК-80Б
Таким чином, ТВК-80Б здатний транспортувати корму до місця споживання і забирати їхні відходи, тобто виконувати найбільш трудомісткі технологічні операції. Але нормовану годівлю на ТВК-80Б здійснити неможливо, оскільки корм при русі стрічки самовільно розрівнюється. Крім того, при русі стрічки тварини вибірково поїдають корм.
Технологічна лінія роздачі корму з кормороздавачем ТВК-80Б і стаціонарним роздавальником КТУ-10 може функціонувати в автоматичному режимі. Для роздачі кормів протягом доби використовують добове програмне реле КТ2 типи 2РВМ чи аналогічне, котре встановлюють відповідно до розрахункової діаграми годівлі, кормороздавальною лінією, відповідно до принципової електричної схеми (рис. 2.3.4), керують вручну або автоматично в наступному порядку. Спочатку контактом програмного пристрою КТ2:1 вмикаються магнітні пускачі КМ2 і КМЗ повернення стрічки транспортера відходів. У кінцевому переднім положенні стрічки кормороздавача кінцевий вимикач SQ1 зупиняє її рух і відключає транспортер відходів через контакт КМ2:2. По команді програмного реле контактами КТ2:2 вмикається привод живильника КМ4 і привод роздачі корму КМ1. Наприкінці роздачі кінцевий вимикач SQ2 вимикає КМ4 з витримкою часу КМ1.

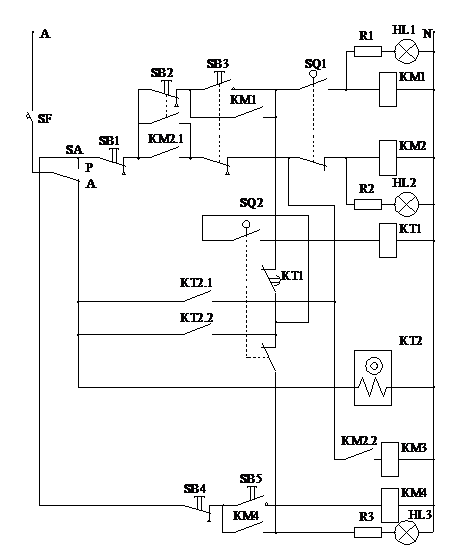
Рис. 2.3.4. Принципова електрична схема керування кормороздавачем ТВК-80Б
Автоматична ідентифікація тварин при індивидуальній годівлі.
Особливість розглянутих в цьому розділі пристроїв — їх непридатність для індивідуальної роздачі кормів. В той же час індивідуальна роздача кормів, особливо концентрованих, має великі переваги, такі, як економна витрата корму і збільшення продуктивності тварин на 10....15 %. Найбільш поширена індивідуальна роздача кормів на доїльному майданчику.
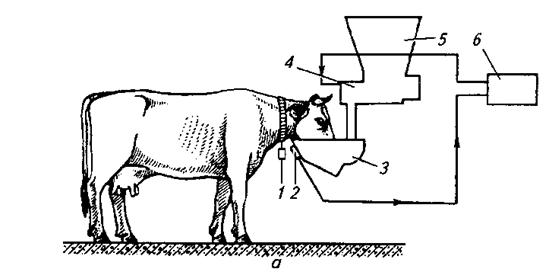
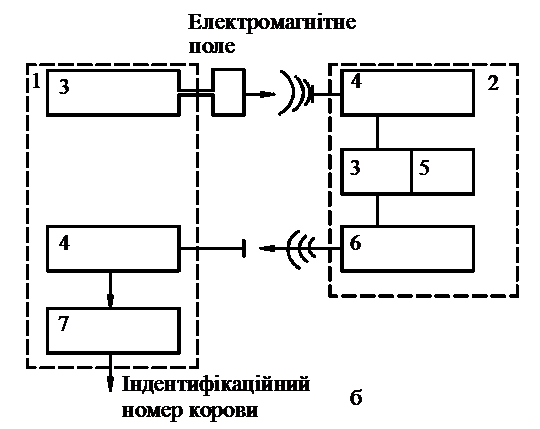
Рисунок 2.3.5. Автоматизована система індивідуального годування ВРХ:
А — технологічна схема системи: 1 — передавач; 2— приймально-передаючий пристрій; .3—кормушка; 4 — дозатор; 5 — бункер; 6— мікроЕОМ; б — функціональная схема: 1 — ідентифікуючий пристрій; 2—транспортер; 3 — генератор електромагнітних хвиль; 4—приймальний пристрій; 5— блок пам'яті; б—передаючий пристрій; 7—декодуючий пристрій
Існують також системи роздачі кормів в корівниках з використанням спеціальних автоматичних кормових станцій. Управління цими системами може бути ручне, програмне або автоматичне. Системи дозування кормів в місцях утримання тварин рекомендуються для високопродуктивних корів. За допомогою автоматичної кормової станції можна організувати видачу концентрованих кормів невеликими дозами протягом доби, коли тварина саме підходить до годівниці (кормової станції).
Очевидно, індивідуальна роздача кормів вимагає виконання ряду умов: ідентифікація тварини, вимірювання його продуктивності і наявність керованого дозуючого пристрою.
Автоматичну ідентифікацію тварин здійснюють за допомогою радіотехнічного пристрою — датчика, закріплюваного у вусі або на спеціальному ошийнику (рис. 2.3.5, а). Найвдалішою конструкцією такого датчика є передавач, об'єднуючий в одному корпусі приймальний і передаючий пристрої (рис. 3.2.5.6). Живлення схеми передавача здійснюється через приймальну феритову антену від генератора, що входить до складу ідентифікуючого пристрою. Передаючий пристрій виробляє послідовність імпульсів відповідно до індивідуального коду, закладеного в пам'яті передавача. Цей сигнал випромінюється передаючим пристроєм на фіксованій частоті, приймається ідентифікуючим пристроєм, декодується і використовується управляючим пристроєм системи автоматичного годування як ідентифікатор тварини.
Кормороздача на свинотоварних фермах обумовлена віком свиней, способом їх утримання, раціоном годування.
На свинотоварних фермах в свинарниках-відгодівельниках найбільш поширені мобільні електрифіковані кормороздавачі – змішувачі КС-1,5, КЭС-1,7, РС-5А. Вони призначені для перемішування і роздачі кормових сумішей вологістю 60...80%. Мобільний електрифікований кормороздавач КСП-0,8 призначений для нормованого роздавання кормів у свинарниках-маточниках свиноматкам та поросятам-сисунам. Вказані кормороздавачі за допомогою транспортерів чи транспортних засобів завантажуються кормами, що надходять з кормоцеху в готовому виді. По принципу роздачі кормів вказані кормороздавачі майже аналогічні.
Кормороздавач-змішувач КС-1,5 (рисунок 2.3.6.) призначений для перемішування і роздавання кормових сумішок на репродуктивних і відгодівельних свинофермах. Він являє собою бункер, змонтований на візку з опорними колесами, який переміщується по рейковому шляху за допомогою електропривода. Крім того, до складу кормороздавача входять лопатева мішалка, вивантажувальні шнеки. Бункер зварної конструкції, складається із середньої циліндричної частини, а також верхньої і нижньої частин, виконаних: у формі зрізаних конусів. Всередині бункера розміщені лопатева мішалка. Днище має вивантажувальні вікна, які перекриваються заслінками. До днища кріпляться вивантажувальні шнеки.
Для запобігання підтікання корму вивантажувальний пристрій обладнаний спеціальним ущільненням. Переміщення заслінки в напрямних пристроях здійснюється штурвалом через шестерню і зубчасту рейку.
Привод візка кормороздавача здійснюється від мотор-редуктора через ланцюгову передачу, привод мішалки - від мотор-редуктора через розподільну коробку, а приводи вивантажувальних шнеків - клинопасовими передачами.
Рисунок 2.3.6. Кормороздавач КС –1,5:
1 – розподільча коробка; 2 –ходова частина; 3 – пристрій зупинки кормороздавача при зіткненні з перешкодами; шнек вивантаження корму; 4 – мотор редуктор змішувача; 5 – вивантажувальні шнеки; 6 – мішалка; 7 – бункер-змішувач; 8 – пульт керування; 9 – панель приладів; 10 –електродвигун механізму переміщення; 11– педаль гальма.
Принципова електрична схема кормороздавача КС –1,5 зображена на рисунку 2.3.7. На вводі кабелю живлення кормороздавача встановлено захисний вимикаючий пристрій SF типу ЗОУП-25, що призначений для захисту людей і тварин від ураження електричним струмом, захисту ізоляції електроустаткування від неприпустимих струмів витоку через неї на землю, а також від струмів витоку, що виникають при несиметричних коротких замиканнях на землю.
При включених пристрої SF та автоматичному вимикачі QF загоряється лампа світлосигнальної арматури HL, яка сигналізує про наявність напруги в ланцюзі керування. Потім вмикається пакетно-кулачковий вимикач SA. При натисканні кнопки SB2 замикається ланцюг магнітного пускача КМ1 і запускається електродвигун змішувача M1. Кнопкою SB3.2 подається напруга на котушку реверсивного магнітного пускача КМ2.1 і котушка пускача КМ5, що використовується проміжного реле. При цьому запускається електродвигун ходової частини (візка) кормороздавача М2 для руху кормороздавача уздовж годівниць вперед. Кнопкою SB4.2 вмикають електродвигун першого шнека М3 або кнопкою SB5.2 вмикають електродвигун другого шнека М4 у залежності від того, на яку сторону вивантажується корм. При двосторонній роздачі корму вмикають обидва шнеки.
При натисканні педалі гальма розмикаються контакти кінцевого вимикача SQ1, вимикається тяговий електродвигун М2, і під дією гальма і сил опору руху кормороздавач майже миттєво зупиняється. При відпусканні педалі гальма контакти SQ1 знову замикаються і відбувається миттєве вмикання тягового електродвигуна М2 без додаткового натискання кнопки SB3.2 чи SB3.3 і рух відбувається в ту сторону, у яку рухався кормороздавач до натискання педалі гальма.
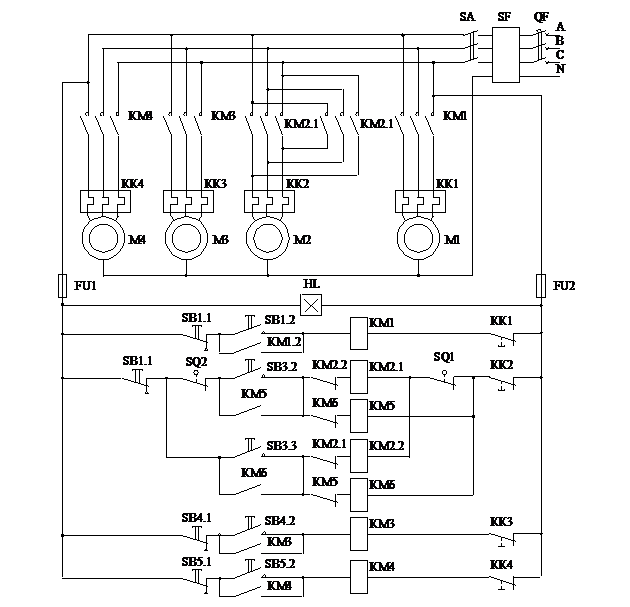
Рисунок 2.3.7. Принципова електрична схема кормороздавача КС-1,5.
У даному випадку кормороздавач рухався вперед, пускач КМ5 залишався під напругою і його контактами кнопка пуску SB3.2 буде заблокована.
Якщо на шляху руху вперед зустрінеться перешкода, то під його дією пристрій, що знаходиться попереду кормороздавача, діє на кінцевий вимикач SQ2 розмикаючи його контакти і автоматично зупиняючи кормороздавач.
Після спорожнювання бункера кнопкою SB3.1 зупиняють тяговий електродвигун М2, привод вивантажувальних шнеків вимикають кнопками SB4.1 і SB5.1, а потім тяговий двигун кормороздавача М2 переключають на зворотний хід кнопкою SB3.3.
Кормороздавач вологих кормосумішей КВК-Ф-15 (ТУ 105-3-1134-86) призначений для дозованого роздавання кормосуміші вологістю 65—75 % з розмірами часток не більше 10 мм у групові годівниці на свинофермах.
Кормороздавач складається (рис. 2.3.8) із бункера-живильника 1, шафи керування 2, електронасосного агрегату 3, перемикача потоків 4, кормопроводу 5, механізму відкривання клапанів 6, напрямної 7, відводів 8 та електроконтактного манометра 9.
Електронасосний агрегат ІВ 20/10 поєднує в собі електродвигун, проміжний корпус і гвинтовий насос.
Перемикач потоку являє собою триходовий кран, який складається з корпусу, кришок та барабана.
Мал. 2.3.8. Загальний вигляд кормороздавача вологих кормосумішей КВК-Ф-15:
1 — бункер-живильник; 2 — шафа керування; 3 — електронасосний агрегат 4 — перемикач; 5 — кормопровід; 6 - механізм відкривання клапанів; 7 — напрямна; 8 — відвід; 9 — електроконтактний манометр.
Кормопровід виготовлений із стальної труби діаметром 80 мм, в якій є вікна для витікання корму і отвори для тросів випускних клапанів.
До складу механізму відкривання клапанів входять електродвигун, черв'ячний редуктор, зубчаста рейка, штанга з упорами, напрямна і двоплечі важелі.
Випускний клапан являє собою пластмасовий конус з жорстко закріпленим співвісним йому тросом, на якому фіксується упор.
Процес роботи здійснюється в такій послідовності. Кормосуміш гвинтовим насосом нагнітається через перемикач потоку в кормопровід. Потім за програмою, встановленою реле часу, послідовно відкриваються випускні вікна і корм по відводам спрямовується у годівниці. Після видачі кормосуміші останнім клапаном вимикається електронасосний агрегат, штанга автоматично повертається у вихідне положення. Після встановлення перемикача потоку для заповнення наступного кормопроводу процес повторюється.
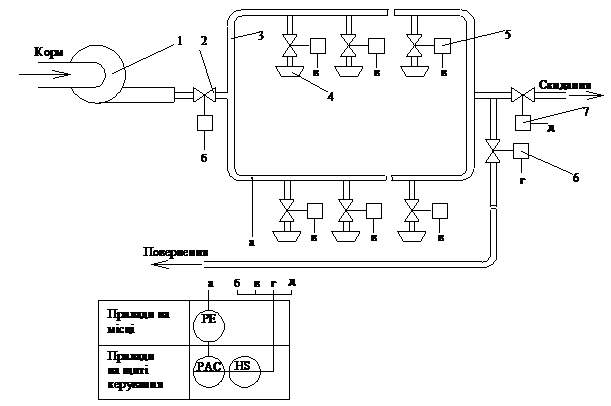
Рис 2.3.9. Функціональна схема автоматизації кормороздавальної гідравлічної системи: 1 – гідронасос; 2 – головний клапан; 3 – лінія кормороздачі; 4 – годівниця; 5 – місцевий клапан дозування; 6 – клапан повернення; 7 – клапан скидання.
Тросово-шайбові кормороздавачі використовують при нормованій годівлі сухими комбікормами. Згідно з функціональною схемою автоматизації (рисунок 2.3.10) управління роздачею кормів здійснюється так. З бункера добової норми видачі корму БСК 1, що знаходиться поза тваринницьким приміщенням, шнековим транспортером комбікорм подається на проміжний бункер 2, що знаходиться в приміщенні. З проміжного бункера корм переміщується по кормопроводу тросово-шайбовим транспортером. Через отвори в кормопроводі комбікорм просипається в індивідуальні (групові) дозатори 3. В останньому індивідуальному дозаторі встановлено датчик рівня LE. Сигнал про готовність видачі корму з датчика рівня потрапляє на регулятор рівня сигналізуючий LAC. Регулятор рівня забезпечує двохпозиційне керування електроприводом завантажувального шнека та тросово-шайбового транспортера залежно від рівня кормів у індивідуальних дозаторах. Видача корму виконується по команді від програмного пристрою KS в установлений час, шляхом одночасного ввімкнення заслінок з електромагнітним приводом
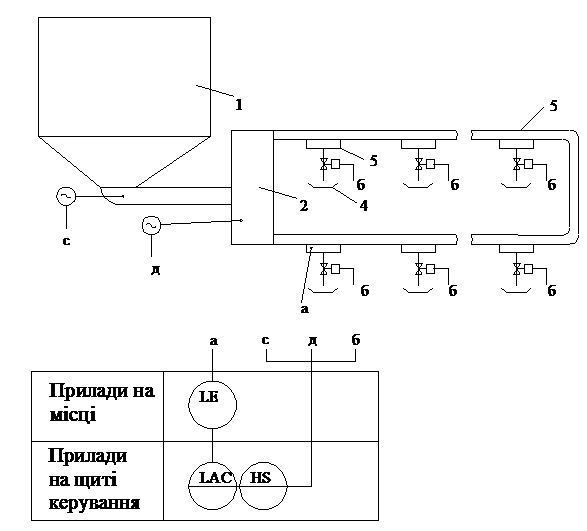
Рисунок 2.3.10. Функціонально-технологічна схема тросово-шайбового кормороздавача.
Спіральні кормороздавачі використовують при ненормованих видачах сипких кормів в свинарниках. По будові вони схожі до тросово-шайбові. Добова норма видачі кормів зберігається, як і в попередній системі в бункерах БСК. З бункера БСК до проміжного бункера та дозаторів по трубопроводам корм подається спіральними транспортерами. Електропривод спіральних транспортерів має програмне керування, яке забезпечує постійну наявність корму в дозаторах. На відміну від попередньої системи, індивідуальні чи групові дозатори мають лише регулювальні заслінки, тому корм в годівницях знаходиться постійно і споживається тваринами по бажанню.
Кормороздача в птахівництві В значній мірі залежить від способів утримання птахів. Розглядають такі способи вирощування та утримання птиці: підлоговий, клітковий та комбінований.
При підлоговому утриманні птахи утримуються на підлозі пташника з можливим вигулом або без нього. При такому утриманні значні затрати праці і обмежена концентрація поголів'я. Безвигульне підлогове вирощування та утримання птахів передбачає використання глибокої підстилки на планчастій або сітчастій підлозі; добру вентиляцію, оптимальний світловий режим. При цьому підвищується рівень механізації та автоматизації виробничих процесів, поліпшується продуктивність, зростає економічна ефективність виробництва. На рисунку 2.3.11 показано технологічну лінію роздачі кормів при безвигульному підлоговому утриманні птахів. Така технологія характерна при використанні тросово-шайбових та спіральних транспортерів кормороздачі.
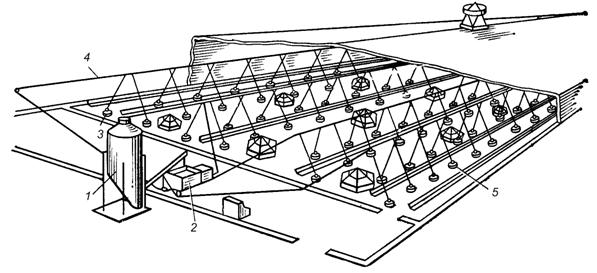
Рисунок 2.3.11. Технологічна лінія роздачі кормів при безвигульному підлоговому утриманні птахів: 1 – бункер для зберігання кормів БСК; 2 – бункер дозатор; 3, 5 – годівниці; 4 – кормопровід.
При клітковому утриманні птахів розміщують у кліткових батареях, які складаються з кількох ярусів кліток. У кожну клітку вміщують по 3-10 Курей або 10-60 Курчат. Розташування курей малими групами зменшує стресові ситуації при формуванні груп, полегшує спостереження за ними. Відносно обмежений рух курей у клітках призводить до зменшення затрат корму порівняно з підлоговим утриманням при такій же продуктивності. При клітковому утриманні збільшуються витрати металу, але відпадає потреба в підстилці і в 3-4 рази збільшується поголів'я на одиниці площі.
Комбіноване вирощування полягає в тому, що курчата до 1,5-2 - місячного віку утримуються в клітках з обігрівом, а потім їх переводять на підлогове утримання в легких приміщеннях, що не опалюються. Такий спосіб застосовують на невеликих птахофабриках.
При аналізі рівнів механізації та автоматизації при різних способах утримання птахів слід відмітити, що при утриманні в кліткових батареях вони найбільші. У батареях передбачається автоматизоване керування фактично повним комплексом технологічних процесів і операцій: роздавання корму, напування птахів, видалення посліду, збирання яєць, підтримання оптимальних параметрів мікроклімату.
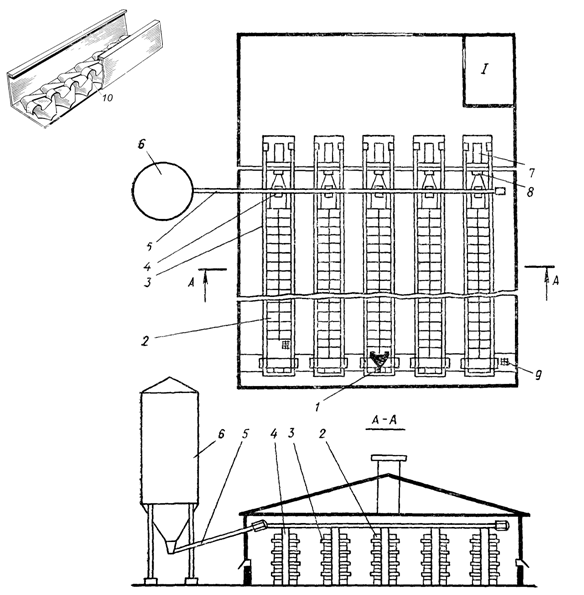 |
Рисунок 2.3.12. Обладнання роздачі кормів в кліткових батареях з ланцюговим транспортером в середині жолобкової годівниці: 1 – установка для поздовжнього прибирання посліду; 2 – кліткова секція; 3, 10 – жолобкова годівниця з ланцюговим транспортером; 4 – бункери-дозатори кліткової батареї; 5 – транспортер шнековий; 6 – бункер зберігання сухих кормів; 7 – елеватор для яєць; 8 – зрівнювальний бачок; 9 – установка для поперечного видалення посліду.
Для годівлі птахів застосовують збалансовані по вмісту живильних речовин гранульовані або розсипні комбікорми. Пташники, як правило, комплектують одновіковою і рівнозначною по продуктивних властивостях групою птахів. Для годівлі птахів застосовують жолобкові годівниці і бункерні автогодівниці різної конструкції.
Обладнання роздачі корму при утриманні в кліткових батареях складається: з зовнішнього бункера 6 Зберігання та видачі сухих кормів; розподільного транспортера 5 подачі кормів від зовнішнього бункера в бункери-дозатори 4 рядів батарей; засобів розподілу корму в жолобкові годівниці. В якості засобів розподілу корму в жолобкові годівниці для даного варіанту кормороздачі є ланцюгові транспортери 10. При цьому корм з нерухомих бункерів-дозаторів подається на ланцюговий транспортер, що переміщується всередині годівниці. Автоматизація кормороздачі в даному випадку зводиться до програмного керування періодичністю видачі кормів, контролю рівня корму в бункерах дозаторах та керування розподілом кормів в жолобкових годівницях.
Автоматизація лінії кормороздачі комплекту обладнання БКМ-3. Комплект обладнання БКМ-3 призначений для кліткового утримання молодняку курей-несучок. Технологічний процес роздачі корму виконується таким чином. Корм з бункера 1 подається похилим транспортером 5 до приймального горизонтального транспортера 4, який доставляє корм у бункери кліткових батарей, завантажуючи їх послідовно. Після того як корм повністю заповнить бункер першої батареї і закриє вивантажувальне вікно в коробі вивантажувального транспортера, він починає транспортуватися до бункера другої батареї і завантажувати його аналогічно попередньому. При заповненні останнього бункера лінія завантаження корму автоматично вимикається. Приводи кормороздавальних ланцюгів вмикаються вручну кнопками або автоматично за командою програмного пристрою.
Принципова електрична схема керування завантаження бункерів кліткових батарей БКМ-3 і кормороздачею першої батареї наведено на рисунку 2.3.13. Схеми керування кормороздачею у всіх інших батареях аналогічні першій. Апарати лінії кормозавантаження (КТ1, КМ1, KV2, КТ2, HL1) Знаходяться в загальному ящику керування. Апарати керування лінією кормороздачі (для першої батареї — КМ2, KV3, HL2) розміщені в ящику керування відповідної батареї. У коло керування пускачем КМ1, який вмикає і вимикає всі електродвигуни лінії завантаження кормів, увімкнені контакти теплових реле КК1 – КК3 електродвигунів похилого і горизонтального транспортерів.
Для роботи в ручному режимі перемикачі SA1 і SA2 ставлять у положення "Р". Транспортери кормозавантаження вмикають кнопкою SB2. Вимикається двигун транспортера після заповнення бункера останньої батареї кінцевим вимикачем SQ1 або натисканням кнопки SB1. Двигун кормороздачі першої батареї вмикається і вимикається натисканням кнопок SB3 І SB4.
При обриві ланцюга кормороздавача двигун його привода вимикається контактами вимикачів обриву ланцюга SQ2.1 - SQ4.1, а контактами SQ2.2 - SQ4..2 вмикаються сигнальні лампи в ящику керування батареєю та в залі.
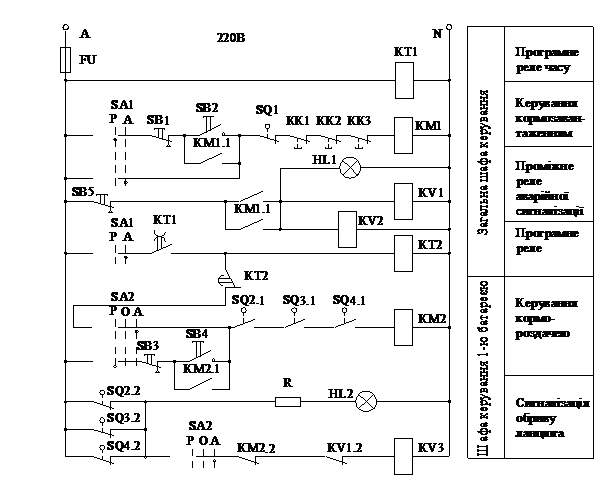
Рисунок 2.3.13. Принципова електрична схемА Кормороздачі обладнання БКМ-3.
В автоматичному режимі перемикачі SA1 і SA2 ставлять у положення "А". Механізми кормозавантаження вмикаються і вимикаються контактом кінцевого вимикача SQ1, що розміщений на бункері останньої кліткової батареї. При його заповненні подається команда на зупинку двигунів транспортерів.
Команди на вмикання транспортерів кормороздавачів подаються від програмного пристрою КТ1, відповідно до технологічних режимів годівлі. При замиканні контакту КТ1 через розмикаючий контакт КТ2 другого реле часу відбувається автоматичний запуск двигунів кормороздавачів всіх кліткових батарей. Витримка часу реле КТ2 дорівнює тривалості кормороздачі батареї.
У випадку обриву ланцюга кормороздавача на будь-якому ярусі кліткової батареї перемикаються контакти одного з кінцевих вимикачів SQ2 - SQ4. При цьому вимикається електромагнітний пускач ланцюгового транспортера КМ2, а реле KV3 - вмикається. Контакт KV3.1 замикає коло обмоток реле KV1 І KV2, які своїми контактами вмикають сигнальну лампу HL1 в залі та лампу сигналізації батарей (на схемі не показана). Для зняття сигналу в залі перемикач SA2 ставлять у положення "О" і натискають кнопку SB5.
Автоматизація лінії кормороздачі комплектом обладнання КБН.
Зовнішній вигляд багатоярусних кліткових батарей типу КБН наведено на рисунку 2.3.14. Як і в попередньому варіанті сухий корм до пташників підвозять спеціальним автокормовозом-завантажувачем і заповнюють бункер типу БСК-10 для зберігання сухих кормів. Похилим шнековим транспортером і горизонтальним поперечним транспортером корм подається до приймальних бункерів навісних кормороздавачів двобічної дії. На відміну від попередніх (стаціонарних бункерів-дозаторів), наповнені навісні бункери-дозатори переміщуються вздовж кліткової батареї і вивантажують корм у жолобкову годівницю. Одночасно з кормороздачею здійснюється прибирання посліду під кожним ярусом кліткової батареї.
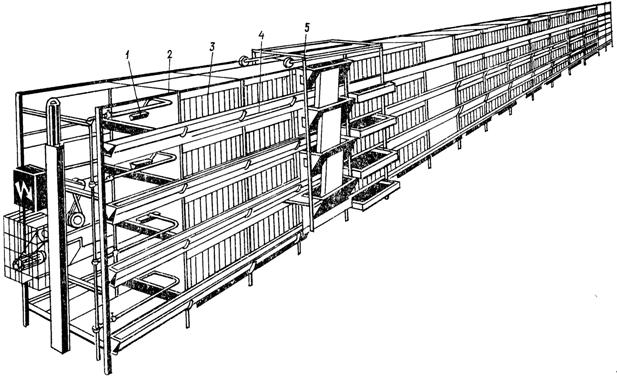
Рисунок 2.3.14. Кліткова батарея КБН для утримання курей-несучок: 1- напувалки; 2 – каркас: 3 – клітка; 4 – годівниця; 5 – кормороздавач.
Рухомі бункери-дозатори кормороздачі та скребки для видалення посліду приводяться у дію від електродвигуна M1 потужністю 0,6 кВт через редуктор та систему передач.
При зворотному русі роздавача корм продовжує заповнювати годівниці, а скребки для видалення посліду здійснюють холостий хід. У кінці пташника встановлено транспортер який видаляє послід за межі будівлі з одночасним завантаженням у транспортні засоби.
Принципова схема керування роздаванням корму і прибирання посліду (рисунок 2.3.15) може працювати у "Ручному" та "Автоматичному" режимах. У "Ручному" режимі керування електродвигунами M1, M2, М3 відбувається за допомогою відповідних кнопок "Пуск" та "Стоп" (SB1, SB2B, SB2H, SB3).
При "Автоматичному" керуванні вмикання роздавача здійснюється програмним реле часу КТ. У вихідному положенні кормороздавачів контакти кінцевих вимикачів SQ4, SQ5, SQ6, SQ7 будуть замкнені. Якщо приймальні бункери-дозатори останнього роздавача не заповнені кормом, то контакти фотореле BL замкнені і котушка магнітного пускача КМ3 одержує живлення та вмикає двигун М3 горизонтального скребкового транспортера. Одночасно замикаючі контакти КМ3 подають напругу на котушку пускача КМ2, який вмикає двигун M2 привода похилого шнекового транспортера.
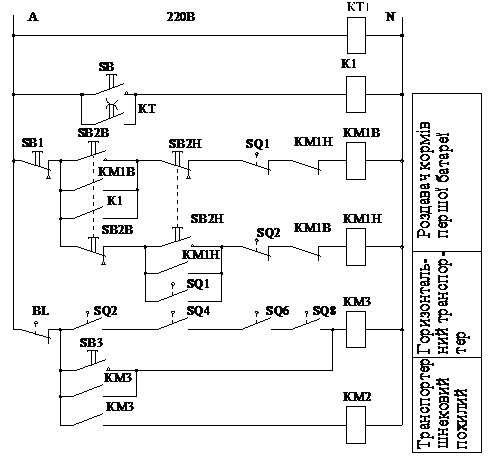
Рисунок 2.3.15. Принципова електрична схема керування еЛектроприводом роздавання корму на птахофермах з КомплектОм Обладнання КБН.
При роботі завантажувальної лінії йде почергове заповнення бункерів кормороздавачів, починаючи з першого. Після заповнення останнього бункера розмикаються контакти фотореле BL і двигуни M2 та М3 заповнення бункерів дозаторів зупиняються.
У визначений час контакти програмного реле часу КТ замикаються, вмикається проміжне реле К1. Замикаючі контакти К1 подають напругу на котушку магнітних пускачів КМ1В (КМ2В, КМЗВ, КМ4В), які вмикають електродвигуни М1А (М1Б, М1В, М1Г) навісних роздавачів, і всі роздавачі починають переміщуватися вздовж пташника і роздавати корм.
На принциповій електричній схемі показано лише кола керування електродвигуна M1 кормороздавача А (КМ1В). Аналогічно йде керування роздавачами Б, В, Г.
Одночасно з роздаванням корму йде прибирання посліду. Коли роздавач доходить до кінця приміщення, упори скребків четвертих ярусів натискають на кінцеві вимикачі SQ1, SQ3, SQ5, SQ7 і привід реверсується.
При зворотному русі роздавання кормів у годівниці триває. У вихідному положенні упори скребків третього ярусу натискають на кінцеві вимикачі SQ2, SQ4, SQ6, SQ8, кормороздавачі вимикаються для підготовки до наступного завантаження кормами.
ЗАПИТАННЯ
1. Вимоги до обладнання кормороздачі в тваринницьких та птахівницьких приміщеннях. 2. Дайте загальну характеристику мобільних кормороздавачів, що використовуються на фермах ВРХ. 3. Дайте загальну характеристику стаціонарних кормороздавачів, що використовуються на фермах ВРХ та вкажіть принципи їх автоматизації. 4. Принципи автоматизації ліній роздачі корму для ВРХ. 5. Дайте загальну характеристику тросово-шайбових та спіральних кормороздавачів, що використовуються на свинотоварних фермах. Вкажіть принципи їх автоматизації. 6. Дайте загальну характеристику кормороздавачів, що використовуються в пташниках з підлоговим утриманням птахів та вкажіть принципи їх автоматизації. 7. Дайте загальну характеристику кормороздавачів, що використовуються в пташниках з утриманням в кліткових батареях та вкажіть принципи їх автоматизації
ТЕСТИ
1. Які засоби автоматизації використовуються в кормороздавачі
РВК-Ф-74.
A. Програмне реле часу, що знаходяться в шафі керування та два кінцевих вимикачі, які розміщені по краям годівниці, датчик наявності корму.
B. Два реле часу, що знаходяться в шафі керування та два кінцевих вимикачі, які розміщені по краям годівниці.
C. Кінцевий вимикач, що знаходиться спереду кормороздавача, призначений для миттєвої зупинки при появі перешкоди на його шляху.
2. Використовуючи принципову електричну схему керування кормороздавача РВК-Ф-74, для чого використовуються реле часу КТ1, КТ2.
А. Для здійснення програмного керування відповідно початку роздачі кормів та видалення відходів.
В. Для керування попереджувальним сигналом відповідно про початок роздачі кормів та видалення відходів.
С. Для здійснення керування реверсуванням електродвигуна переміщення стрічки транспортера.
3. Який пристрій використовують для автоматичного вмикання лінії кормороздачі ТВК-80Б в заданий час доби?
A. Реле часу КТ2.
B. Шляхові (кінцеві) вимикачі SQ1? SQ2.
C. Реле часу КТ1.
4. Які засоби автоматизації використовуються в кормороздавачі КС-1,5 ?
A. Реле часу.
B. Реле часу, кІнцеві вимикачі.
C. Кінцеві вимикачі.
5. Використовуючи принципову електричну схему керування кормороздавача КС-1,5 вкажіть для чого використовується Кінцевий вимикач SQ1?
A. При заклинюванні шнеків вивантаження корму, зупиняє їх привод.
B. При появі перешкоди, під дією його стрижневий пристрій, що знаходиться попереду кормороздавача, вимикається тяговий електродвигун М2.
C. При натисканні педалі гальма розмикаються контакти кінцевого вимикача і вимикається тяговий електродвигун М2.
6. Які засоби автоматизації використовуються в кормороздавачі вологих кормосумішей КВК-Ф-15.
A. Два реле часу, що знаходяться в шафі керування та два кінцевих вимикачі, які розміщені по краям годівниці
B. Програмне реле часу, що знаходяться в шафі керування, механізму відкривання клапанів.
C. Програмне реле часу, що знаходяться в шафі керування та два кінцевих вимикачі, які розміщені по краям годівниці, датчик наявності корму.
7. Використовуючи принципову електричну схему керування кормороздавача КЭС-1,7 вкажіть якими кінцевими вимикачами виконується подача команди на вивантаження корму в годівниці?
A. Кінцевими вимикачами SQ1, SQ2.
B. Кінцевими вимикачами SQ4, SQ6.
C. Кінцевими вимикачами SQ3, SQ5.
8. Які пристрої використовуються для автоматичного вмикання ланцюгового транспортера кормороздачі комплекту обладнання БКМ-3?
A. Реле часу КТ1.
B. Реле часу КТ2.
C. Кінцевий вимикач SQ1.
9. Який пристрій використовується для автоматичного вимикання транспортера завантаження кормороздавача комплекту обладнання БКМ-3?
A. Кінцевий вимикач SQ1.
B. Кінцеві вимикачі SQ2- SQ4.
C. Реле часу КТ2.
10 . Який пристрій використовується для автоматичного вмикання електроприводу бункерів дозаторів кормороздавача комплекту бладнання КБН?
A. Реле часу КТ.
B. Кінцеві вимикачі SQ1, SQ2.
C. Фотореле BL.
2.3.2. Автоматизація напування тварин і птахів.
На тваринницьких фермах, на пасовищах і при табірних умовах утримання тварин використовують різні способи напування тварин. Залежно від способу утримання тварин та кількості поголів’я, що обслуговується використовують індивідуальні і групові напувалки. За принципом дії розрізняють напувалки автоматичні і напівавтоматичні, за наявністю додаткових пристроїв – з електричним підігрівом води або без підігріву.
Одночашечна стаціонарна автоматична поїлка АП-1 (рисунок 2.3.16) призначена для напування ВРХ при прив’язному утримані тварин і розрахована для обслуговування двох тварин. Напувалка АП-1 складається з чаші 9, клапана 3 і важеля 2 з віссю 1. Клапанний пристрій напувалки складається з притискача 4, сідла 5, клапана 3, амортизатора 6 і корпусу 7. Гумовий амортизатор 6 діє на клапан 3 і щільно закриває вихідний отвір у гумовому сідлі 5. При цьому важіль 2, спираючись на кінець стержня клапана, що виступає назовні, піднімається над дном чаші 9. Поїлка наповнюється водою з водопровідної мережі при тиску 0,04…0,20 МПа.
Оскільки у чаші завжди залишається трохи води, тварина, намагаючись напитися, натискує на важіль і тим самим відкриває клапан. Вода під дією напору надходить у чашу напувалки через отвори у нарізній пробці - притискачі 4. Важіль 2 і клапан 3 під дією амортизатора повертається у попереднє положення, і надходження води у чашу напувалки припиняється. Деталі напувалки, крім сідла, амортизатора і осі, виготовлені з пластмаси.
Автоматичну напувалку АП-1 можна встановити у будь якому корівнику, де є водопровідна мережа або місткість для води. ЇЇ встановлюють на висоті 50 - 60 см від підлоги стійла і кріплять до вертикальної площини.
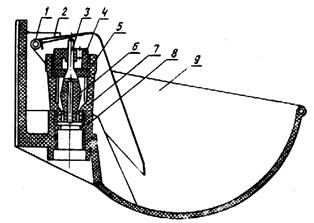 Рисунок 2.3.16. Індивідуальна поїлка АП-1 для напування ВРХ:
Рисунок 2.3.16. Індивідуальна поїлка АП-1 для напування ВРХ:
1 – вісь; 2 – важіль; 3 – клапан; 4 – притискач; 5 – сідло; 6 – амортизатор; 7 – корпус; 8 – кільце; 9 – чаша.
Групові поїлки АГК-4 (рисунок 2.3.17) використовують для напування ВРХ при безприв’язному утримані на вигульних майданчиках. Поїлка дозволяє одночасно обслуговувати чотири тварини. Корпус 1 напувалки виготовлений з листової сталі. Він має всередині теплову ізоляцію 10. Напувалка складається з напувальної чаші 2 з кришкою 3, камери підігріву повітря, камери з поплавковим клапанним механізмом 5, електронагрівника 9 (потужністю 0,8 кВт при напрузі 220В)і підвідної труби 11. У стінці корпусу передбачене вікно для підключення автонапувалки до водопровідної мережі, яка закривається монтажною кришкою з написом: "Підведення води". До дна чаші приварено стояк клапанно-поплавкового механізму і зливну трубку, що виходить за межі корпусу.
Клапанно-поплавковий механізм використовують для підтримання постійного рівня води у чаші. Підтримання температури води в межах 10…18°С Здійснюється терморегулятором манометричного типу. Його використовують для вмикання нагрівника в діапазоні заданої температури.
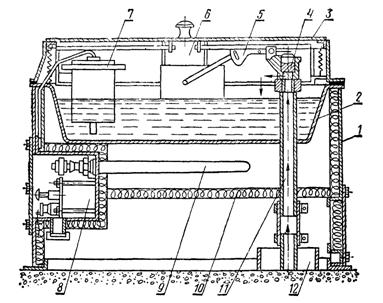
Рисунок 2.3.17. Групова поїлка АГК – 4А для напування ВРХ: 1 - корпус; 2 – чаша; 3 – кришка; 4 – клапан; 5 – поплавково-клапанний механізм; 6 – розподільник; 7 – регулятор температури; 8 – блок заземлення; 9 – електронагрівник; 10 –теплоізоляція; 11 – водопровідний трубопровід; 12 – утеплювальна труба.
Поїлка стаціонарна з самоочищенням ПСС-1 (рисунок 2.3.18) призначена для напування свиней з одночасним очищенням від корму і бруду. Вона складається з чавунного корпуса з чашею, з’єднаного з водопровідною мережею. Подача води в чашу здійснюється як і в автонапувалці АП-1 За допомогою важільно-клапанного механізму.

Рисунок 2.3.18. Індивідуальна поїлка ПСС – 1 для напування свиней.
Поїлка ПБС – 1 (рисунок 2.3.19) призначена для напування свиней. Діє поїлка наступним чином. Тварина поглинає в рот сосок з носком і притискає сосок. При натисканні на сосок 1, він переміщується до носка корпусу 2 і клапан 5 відкриває подачу води через зазор, що утворюється між корпусом і ним. В рот тварини вода потрапляє через сосок. При відпусканні соска клапан під дією амортизатора повертається у вихідне положення.
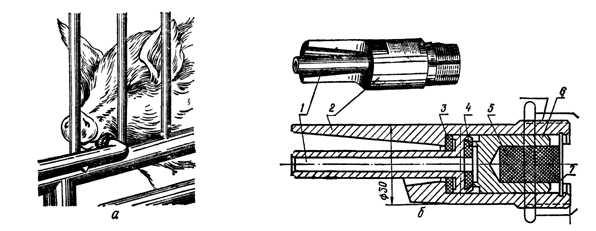
Рисунок 2.3.19 Соскова поїлка ПБС – 1: а – процес напування; б – будова поїлки; 1 – сосок; 2 – корпус; 3, 4 – ущільнювачі;5 – амортизатор; 6 – клапан; 7 – упор.
В розглянутих поїлках автоматична подача води здійснюється за допомогою клапанних механізмів різних типів. В системах напування тварин з індивідуальними поїлками в зимовий період передбачають підігрів води. Для підігріву води в замкнутому контурі магістралі автонапування встановлюють проточні електроводонагрівачі з автоматичним регулюванням температури нагріву води. Рівномірність температури води в різних точках системи автонапування досягається за рахунок використання циркуляційних насосів з керуванням по температурі води в найбільш віддаленій точці.
Технологічний процес напування птахів має свої специфічні особливості, які обумовлені властивостями організму птахів та способом їх утримання.
При утриманні птахів в кліткових батареях використовують проточні жолобкові автопоїлки (рисунок 2.3.20 а). Принцип керування такою системою полягає в автоматичному вмиканні і вимиканні електромагнітного клапана подачі води 1 на поїлки 3 за допомогою програмного пристрою. Дана система напування птахів має суттєві недоліки: витрати води в них в 3…3,5 рази перевищують споживання; значні затрати праці на очистку.
Групові чашечні (рисунок 2.3.20 б) та непроточні жолобкові (рисунок 2.3.20 в) поїлки використовують при утриманні птахів на підлозі та в кліткових батареях горизонтального типу. В даних поїлках управління подачею води здійснюється регуляторами прямої дії з клапанним механізмом.
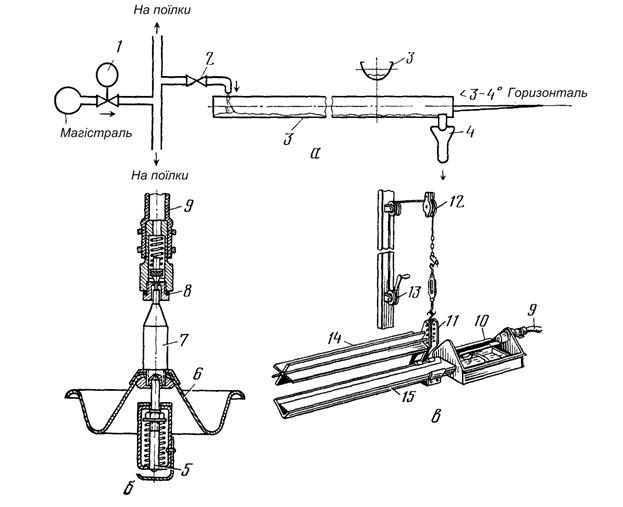
Рисунок 2.3.20. Автопоїлки для птахів: а – проточна жолобкова; б – групова чашечна; в – непроточна жолобкова; 1 – електромагнітний клапан; 2 – вентиль ручного регулювання; 3 – поїлки; 4 – трубопровід каналізації; 5 – шток; 6 – чаша; 7 – підвіска; 8 – клапанний механізм; 9 – шланг водогону; 10 – поплавкова камера; 11 – штанга; 12 – блок; 13 – барабан лебідки; 14 – огорожа для очистки від кормів; 15 – жолоб поїлки.
Ніпельні поїлки (рисунок 2.3.21) використовують при різних умовах утримання птахів. В системах напування з ніпельними поїлками вода з водопровідної мережі подається в бачки. Рівень води в бачках підтримується поплавково-клапанними регуляторами рівня прямої. Через поліетиленові труби вода подається на магістраль з ніпельними поїлками. В магістралі напування надлишковий тиск води становить 0,34 МПа. Він залежить від рівня води в бачку і є однією із головних вимог нормальної роботи поїлок.
Робота поїлки полягає в тому, що за рахунок притирання фасок 3 клапанів 2 та 5 на кінці стержня клапана 5 зберігається крапля води. Коли птах клює її, відбувається дія на клапан 5 та 2 і це призводить швидкої появи нової краплі. Для усунення витрат води під ніпельними поїлками можуть встановлювати чаші.
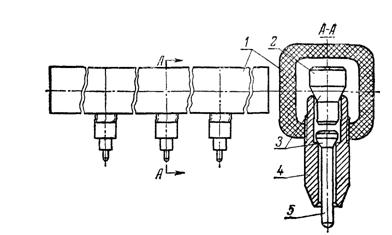
Рисунок 2.3.21. Ніпельна поїлка: 1 – труба; 2 – верхній клапан; 3 – фаски; 4 – корпус; 5 – нижній клапан.
ЗАПИТАННЯ
1. Які автонапувалки використовують для напування ВРХ? 2. Принципи автоматизації автонапувалок для ВРХ. 3. Які автонапувалки використовують для напування свиней? 4. Принципи автоматизації автонапувалок для свиней. 5. Які автонапувалки використовують для напування птахів? 6. Принципи автоматизації автонапувалок для птахів.
ТЕСТИ
1. Як поділяються автонапувалки в залежності від кількості обслуговуючого поголів’я?
A. Індивідуальні.
B. Індивідуальні і групові.
C. Стаціонарні й пересувні.
2. Який засіб автоматичного управління подачі води використовується в поїлках для тварин АП-1, ПСС – 1?
A. Використовується регулятор прямої дії з поплавково-клапанним механізмом.
B. Використовується регулятор прямої дії з важільно-клапанним механізмом.
C. Програмний пристрій.
3. Який засіб автоматичного управління подачі води використовується в поїлці АГК – 4А ?
A. Використовується регулятор прямої дії з поплавково-клапанним механізмом.
B. Програмний пристрій.
C. Використовується регулятор прямої дії з важільно-клапанним механізмом.
4. Яким способом здійснюється нагрів води у автонапувалці АГК-4А?
A. За допомогою змішування холодної з гарячою водою.
B. За допомогою нагріву ТЕНами
C. За допомогою електродного нагріву.
5. Які засоби використовується в системах автонапування Для підігріву води?
A. Використовуються проточні електроводонагрівачі з регуляторами температури нагріву води.
B. Використовується циркуляційні насоси з керуванням програмними пристроями.
C. Використовується проточні електроводонагрівачі та циркуляційні насоси з регуляторами температури нагріву води.
6. Які засоби автоматичного управління подачі води використовується в проточних жолобкових поїлках пташників ?
A. Використовується регулятор прямої дії з поплавково-клапанним механізмом.
B. Програмний пристрій.
C. Використовується регулятор прямої дії з важільно-клапанним механізмом.
7. Які засоби автоматичного управління подачі води використовується в непроточних жолобкових поїлках пташників ?
А. Використовується регулятор прямої дії з поплавково-клапанним механізмом.
В. Програмний пристрій.
С. Використовується регулятор прямої дії з важільно-клапанним механізмом.
8. Які засоби автоматичного управління подачі води використовується в чашечних поїлках пташників ?
А. Використовується регулятор прямої дії з поплавково-клапанним механізмом.
В. Програмний пристрій.
С. Використовується регулятор прямої дії з важільно-клапанним механізмом.
2.4. АВТОМАТИЗАЦІЯ ПРИБИРАННЯ ГНОЮ ТА ПОСЛІДУ.
2.4.1. Автоматизація установок для прибирання гною та посліду.
Роботи по прибиранню і видаленню гною та посліду характеризуються значною трудомісткістю. Використання того чи іншого типу установок залежить в основному від способу утримання тварин та птахів. В процесі прибирання гною та посліду виконують слідуючи операції: очищення місць утримання тварин та птахів; прибирання з приміщення та вивантаження в транспортні засоби чи сховища; утилізація.
Технологія утилізації гною дозволяє зменшити забруднення повітря та ґрунту, передбачає отримання якісних органічних добрив, газоподібного палива (біогаз).
Для прибирання гною в тваринництві: з вигульних майданчиків; приміщень безвигульного утримання тварин на глибокій підстилці, а також транспортування його з приміщень у гноєсховище або гноєплощадки використовують мобільні механізми: скрепери та бульдозери, причіпні тракторні візки, електрифіковані вагонетки. Для прибирання гною з корівників і свинарників використовують скребкові, скреперні транспортери, гідравлічні та пневматичні системи видалення гною.
Конвеєри скребкові гноєприбиральні типу КСГ (ТСН) отримали найбільше розповсюдження для прибирання гною з тваринницьких приміщень та видалення його в транспортні засоби. Їх використовують при утриманні великої рогатої худоби в стійлах та утримання свиней в станках.
Гноєприбиральний конвеєр КСГ-7-02 (ТСН-160А) може працювати з додатковим жолобом для ланцюга, якщо скребки розміщенні над ланцюгом, і в каналах без додаткового жолобу, якщо скребки – під ланцюгом.
Технологія прибирання гною така. Згорнутий в канали гній скребками горизонтального конвеєр 1 (рисунок 2.4.1) переміщується вздовж каналу поступаючи на похилий конвеєр 2. Похилим конвеєром гній вивантажується на транспортні засоби. Прибирання гною повинно виконуватися не менше 3 разів на добу. При використанні конвеєр застосовувати соломисту підстилку довжиною більше 100мм не рекомендується. Перед прибиранням гною необхідно пересвідчитись в відсутності сторонніх предметів в каналі, при необхідності зняти перехідні містки. В першу чергу вмикається похилий, а потім горизонтальний конвеєр (для усунення завалів похилого конвеєра). В зимовий період перед пуском конвеєра необхідно пересвідчитись в відсутності примерзань ланцюга і скребків похилого конвеєра, а після виключення горизонтального конвеєра похилий конвеєр повинен пропрацювати 2 – 3 хвилини вхолосту.
Рисунок 2.4.1. Гноєприбиральний конвеєр КСГ-7-02 : 1 – горизонтальний транспортер; 2 – похилий транспортер; 3 – ящик керування; 4 – мотор-редуктор горизонтального транспортера; 5 – натяжний пристрій; 6 – ланцюг з скребками; 7- поворотний пристрій.
Принципова електрична схема керування гноєприбиральним конвеєром КСГ-7-02 (рисунок 2.4.2) передбачає необхідну послідовність ввімкнення електродвигунів похилого М1 і горизонтального конвеєрів. Підготовка конвеєра до роботи здійснюється автоматичним вимикачем QF1, при ввімкненні якого загорається сигнальна лампа HL1. Кнопкою SB3 забезпечується ввімкнення котушки електромагнітного пускача КМ1, силовими контактами якого подається напруга на двигун М1 похилого конвеєра. Допоміжний контакт КМ1.1 блокує кнопку пуск SB3 і готує до роботи коло магнітного пускача КМ2. Кнопкою SB4 вмикається котушка магнітного пускача КМ2, контактами КМ2 вмикається електродвигун М2 горизонтального конвеєра, а контактом КМ2.1 блокується кнопка пуск SB2. Зупинка електродвигунів конвеєрів здійснюється у зворотній послідовності кнопками SB1 та SB4 (кнопкою SB1 забезпечується вимкнення обох двигунів). Захист електродвигунів від коротких замикань здійснюється автоматичним вимикачем QF1, а від їх перегріву по будь-якій причині здійснюється пристроєм вбудованого температурного захисту F (УВТЗ). Захист кіл керування при виникненні коротких замикань здійснюється запобіжником FU1.
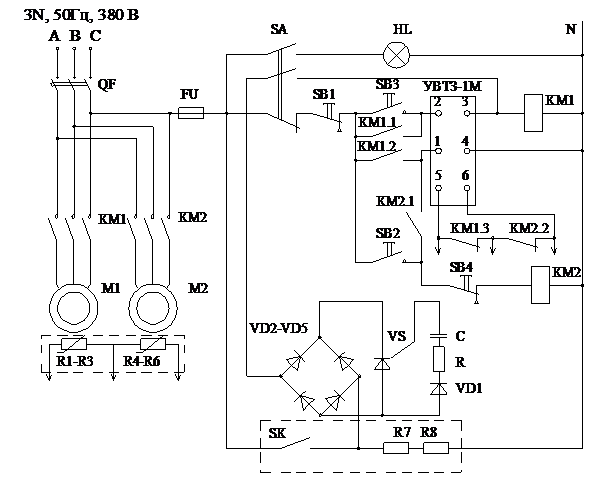
Рисунок 2.4.2. Принципова електрична схема гноєприбирального конвеєра КСГ-7-02 (ТСН-160А).
Передбачений також пристрій захисту двигуна похилого конвеєра в зимовий період. Вмикається він за допомогою перемикача SA , сигнальна лампочка HL сигналізує про цей режим. Якщо температура вище норми, контакт термореле SK замкнений і напруга з випрямляючого моста YD2-YD5 подається через діод YD1, резистор R і конденсатор С на управляючий електрод тиристора YS, який відкривається. Коли температура повітря стає нижче норми, контакт SK термореле розмикається і тиристор YS закривається, блокуючи вмикання пускача КМ1 похилого конвеєра.
Скреперні установки типу УС призначені для прибирання гною ВРХ з відкритих проходів при безприв’язно-боксовому утриманні тварин, а також при утриманні свиней на щільовій підлозі.
При утриманні тварин на щільовій підлозі та для видалення гною з каналів можливе використання гідравлічних систем. Пневматичні системи використовують для транспортування гною в гноєсховища.
Скреперна установка (рисунок 2.4.3) складається з приводного механізму 4, поворотних пристроїв 1, скребків 3, 5, ланцюгового контуру 2 довжиною 170м, щита керування.
Установка працює нормально при обмеженій кількості підстилкових матеріалів - торфу, подрібненої соломи, тирси - до 1кг на голову великої рогатої худоби на добу. Чистота прибирання залежить від якості бетонування гнойового каналу. Щоб скрепер міг прибирати крайні стійла, його робочі органи повинні виходити за межі стійла на 2,5-2,7м з таким розрахунком, щоб при робочому ході він відкривався перед стійлом. Щоб забезпечити повне скидання гною, скребок має доходити до поперечного каналу. Одночасно потрібно стежити за тим, щоб скребок не доходив до поворотного пристрою.

Рисунок 2.4.3. Скреперна установка типу УС-15: 1 – поворотний пристрій; 2 – ланцюговий; 3,5 – скребКи; 4 – мотор-редуктор Привідного механізму.
Схема керування скреперною установкою УС – 1,5 має ручне і автоматичне керування, яке задається вимикачем SA. Коли вимикача SА вимкнений, то здійснюється ручний режим, а коли замкнений – автоматичний режим роботи установки.
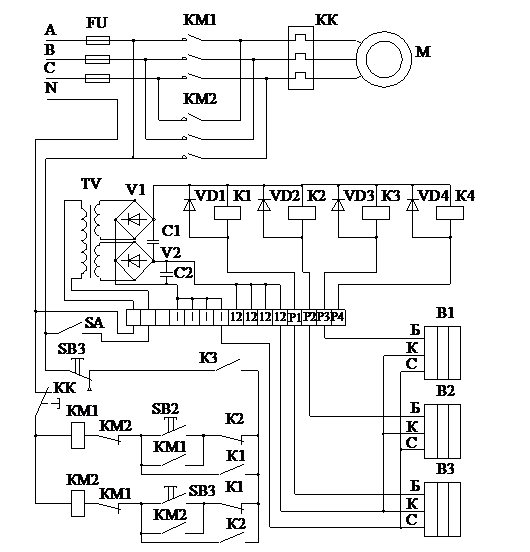
Рисунок 2.4.4. Електрична принципова схема керування скреперною установкою УС-15.
В автоматичному режимі безконтактний шляховий вимикач В1 спрацьовую при вмиканні поперечного транспортера і подає напругу на проміжне реле К3, яке замикає свій контакт в колі котушок магнітного пускача КМ1 і КМ2.Скребки установки знаходяться в початковому положенні, при цьому спрацьовує безконтактний шляховий вимикач В2 і вмикає реле К2, який своїм замикаючим контактом подає напругу на котушку магнітного пускача КМ2, а розмикаючими, що знаходяться в колі котушки магнітного пускача КМ1, не дає можливість ввімкнутися. Він силовими контактами вмикає електродвигун установки. При досяганні скребками крайнього кінцевого положення спрацьовує безконтактний шляховий вимикач В3, який вмикає реле К1. Реле К1 розмикає розмикаючий контакт в колі котушки магнітного пускача КМ2, що приводить до вимикання електродвигуна, а замикаючим контактом в колі котушки магнітного пускача КМ1 подає на нього напругу керування. Це приводить до спрацювання силових контактів пускача і вмикання на реверс електродвигуна для руху скребків установки в зворотному напрямку.
В ручному режимі керування електродвигуном установки здійснюється за допомогою пускових кнопок SВ2 або SВ3, а вимикання за допомогою кнопки SВ1.
Живлення безконтактних шляхових вимикачів здійснюється пониженою напругою постійного струму, яка утворюється за допомогою трансформатора ТV і випрямлячів. Затримка на вимикання проміжних реле К1-К3 здійснюється діодами VD3-VD6, які шунтують їхні котушки.
В тваринницьких комплексах для зменшення затрат праці створюють лінії прибирання гною в приміщенні з декількома скребковими транспортерами. При керуванні такими лініями передбачають необхідну послідовність включення електродвигунів транспортерів, щоб уникнути завалів непрацюючого вивантажувального транспортера. Керування періодичністю та тривалістю роботи ліній прибирання гною виконують за допомогою програмних пристроїв.
Вибір того чи іншого способу прибирання посліду в пташниках залежить в основному від технології утримання, виду і віку птиці. Засоби механізації прибирання посліду можна класифікувати за мобільністю - на стаціонарні та пересувні. До стаціонарних належать механізми, які входять до комплектів технологічного обладнання пташників і змонтовані як усередині, так і за їхніми межами. Вони призначені для прибирання посліду з місць утримання птиці і транспортування його до пересувних транспортних засобів або безпосередньо до місця утилізації. До пересувних належать бульдозери, тракторні причепи та спеціальні автомобілі.
Якщо птиця утримується в багатоярусних кліткових батареях, то послід прибирають з кожного ярусу канатно-скребковими установками і ними ж скидають на горизонтальні конвеєри.
Головними робочими органами канатно-скребкових установок є скребки, що закладаються по одному або по кілька на один ярус у міжярусний простір. Скребки з'єднуються тросом у вигляді замкненого контуру і приводяться в рух від електропривода.
Можливе прибирання посліду по ярусам кліткових батарей за допомогою стрічкових транспортерів, які розміщують між ярусами кліток. Для видалення посліду зі стрічки в кінці кліток встановлюють нерухомі скребки.
При утриманні птахів на підлозі використовують канатно-скребкові конвеєри, що встановлюють в спеціальні послідні канали, які розміщені під настилом.
Для транспортування посліду за межі приміщень застосовують похилі конвеєри, скребкові гноєнавантажувачі та інші пристрої.
Канатно-скребкові установки призначені для видалення посліду з каналів, розміщених вздовж пташника, при підлоговому утриманні птиці, а також при утриманні в одноярусних та каскадних кліткових батареях.
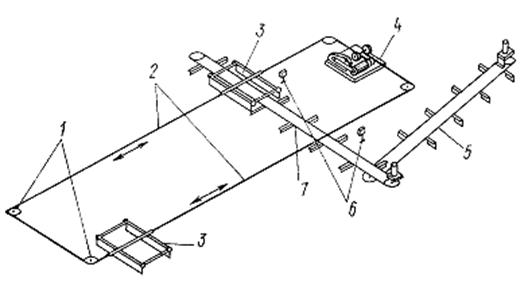
Рисунок 2.4.5. Технологічна схема установки для прибирання посліду типу МПС: 1 – поворотний пристрій; 2 – трос; 3 – скребковий візок; 4 – приводна станція установки; 5,7 – транспортер типу ТСН-3,0Б; 6 – кінцеві вимикачі.
Схема канатно-скребкової установки типу МПС зображена на рисунку 2.4.5. Установки бувають одно - і двовізкові, тому залежно від кількості каналів у пташнику їх можна комплектувати для одно-, дво-, три-, чотири - та шестиканальних схем. Скребковий візок має раму з чотирма колесами і два скребки з канатом.

Рисунок 2.4.5. ПРинципова електрична схема установки для прибирання посліду типу МПС.
Приводна станція складається із зварної рами, на якій встановлені електродвигун, редуктор, приводний і натяжний барабан. Обертання від електродвигуна до редуктора передається клинопасовою передачею. Для натягання пасів електродвигун переміщують у поздовжніх пазах рами. Транспортер скребковий укомплектований складальними одиницями серійних скребкових конвеєрів типу ТСН-3,0Б або ТСН-160А.
В автоматичному режимі програмне реле КТ вмикає магнітний пускач КМ1, який силовими контактами вмикає електродвигун скребкового механізму і пускачем КМ3 двигуни поперечного та вивантажувального транспортерів ТСН. При досяганні скребками кінцевого вимикача SQ1 він спрацьовує і своїми розмикаючим контактом вимикає магнітний пускач КМ1, а замикаючим контактом вмикає магнітний пускач КМ2 для реверсування двигуна скребкового механізму. Установа вимикається за допомогою кінцевого вимикача SQ2 при досяганні скребкового механізму початкового положення.
В ручному режимі установка вмикається кнопкою SВ2 для руху механізму вперед, для руху в зворотному напрямку кнопкою SВ3. Зупинка здійснюється за допомогою кнопки SВ1.
У системах де відбувається об'єднання декількох технологічних операцій у загальну потокову лінію найчастіше спільно проектуються лінії збирання посліду, видалення з приміщення та транспортування в сховище. Для керування потоковими лініями прибирання посліду передбачають місцеве, дистанційне та автоматизоване керуванням електроприводами машин і механізмів. Системи автоматизації повинні забезпечувати послідовність автоматичного і ручного включення машин і механізмі в порядку, зворотному напрямку руху посліду, щоб виключити завал установок і зупинку лінії в заданій послідовності у випадку аварійної зупинки однієї з установок; контроль і сигналізацію роботи всіх машин і механізмів.
ЗАПИТАННЯ
1. Від чого залежить спосіб прибирання гною та посліду? 2. Які установки використовують для прибирання гною в приміщеннях ВРХ та принципи їх автоматизації? 3. Які установки використовують для прибирання гною в приміщеннях для утримання свиней та принципи їх автоматизації? 4. Які установки використовуються для прибирання посліду при клітковому утримані птиці та принципи його автоматизації? 5. Які установки використовуються для прибирання посліду при утримані птиці на підлозі та принципи його автоматизації?
ТЕСТИ
1. Для чого застосовують транспортер ТСН-160А?
A. Застосовують для прибирання гною в приміщеннях ВРХ і свинарниках.
B. Застосовують для прибирання гною в приміщеннях ВРХ і свинарниках та вивантаження його в транспортні засоби.
C. Застосовують для транспортування гною в гноєсховище.
2. Використовуючи принципову електричну схему ТСН-160А вкажіть чим забезпечується послідовність включення електродвигуна горизонтального транспортера після пуску похилого?
A. Кнопкою SB2.
B. Контактом електромагнітного пускача КМ1.2.
C. Електромагнітним пускачем КМ2.
2. Використовуючи принципову електричну схему ТСН-160А вкажіть для чого використовується пристрій F?
A. Для блокування вмикання пускача КМ1 похилого транспортера.
B. Для захисту електродвигунів транспортерів при виникненні коротких
замикань.
C. Для захисту електродвигунів транспортерів від перегріву по будь якій
причині.
3. Для чого застосовують скреперні установки типу УС-15?
A. Для прибирання гною ВРХ з відкритих проходів при безприв’язно-боксовому утриманні тварин, а також при утриманні свиней на щільовій підлозі.
B. Для прибирання гною в приміщеннях ВРХ і свинарниках та вивантаження його в транспортні засоби.
C. Для транспортування гною в гноєсховище.
4. Використовуючи принципову електричну схему установки УС – 15 вкажіть якими пристроями здійснюється автоматичне керування?
A. Безконтактним шляховим вимикачем.
B. Шляховими вимикачами.
C. Трьома безконтактними шляховими вимикачами.
5. Використовуючи принципову електричну схему установки УС – 15 вкажіть яку функцію виконує кінцевий вимикач SQ1?
A. В автоматичному режимі здійснює керування реверсом.
B. В автоматичному режимі здійснює керування вимкненням електромагнітного пускача КМ1 при досягненні скребка до каналу.
C. В автоматичному режимі через реле К3 забезпечує аварійне вимкнення транспортера при перевищенні ходу скребків.
6. Які засоби автоматизації використовуються в канатно – скребковій установці типу МПС?
A. Програмне реле часу
B. Кінцеві вимикачі
C. Програмне реле часу, та кінцеві вимикачі.
7. Для чого використовується програмне реле часу в канатно – скребковій установці типу МПС
A. Для автоматичного вимикання установки по заданій програмі
B. Для автоматичного вмикання установки по заданій програмі в заданий час доби.
C. Для автоматичного вмикання і вимикання установки по заданій програмі
8. Для чого використовується кінцевий вимикач SQ2 в канатно – скребковій установці типу МПС ?
A. Для автоматичного вимикання електродвигуна приводу скребкового механізму
B. Для автоматичного вимикання установки
C. Для автоматичного реверсу електродвигуна приводу скребкового механізму при досяганні скребками крайнього кінцевого положення
2.4.2. Автоматизація потокових ліній для видалення гною та посліду.
Установки по видаленню гною з використанням візків призначена для прибирання гною в стійловому приміщені, завантаження в транспортні візки та транспортування в гноєсховище.
Складається лінія з транспортера ТСН-3Б та візка, який рухається в гноєсховище по рельсі підвісної дороги.
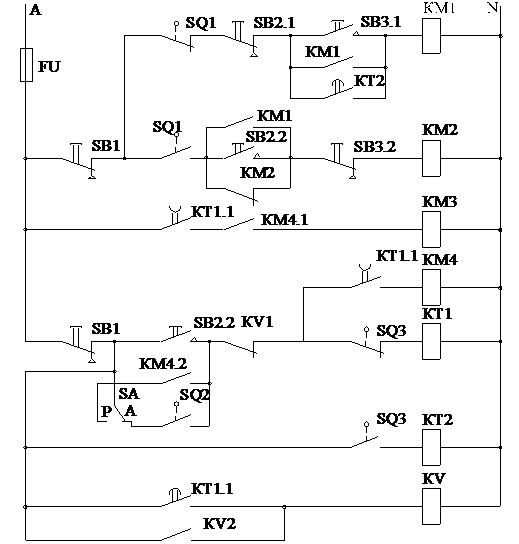
Рис. 2.4.6. Принципова схема керування лінією прибирання гною з використанням візків.
Найпростіша технологічна лінія збирання і навантаження гною транспортерами типу ТСН-3Б в візки підвісної дороги може функціонувати як в ручному, так і автоматичному режимах (рис. 2.4.6.).
В автоматичному режимі замикають тумблер SA або натискають кнопку SB5. Отримує живлення реле часу КТ1, що вмикає магнітні пускачі КМ3 та КМ4 похилого і горизонтального транспортерів відповідно.
Коли візок наповнений гноєм, спрацьовує ваговий пристрій і через кінцевий вимикач SQ3 вимикає реле часу КТ1. З витримкою часу, необхідної для очищення від гною, зупиняються спочатку горизонтальний, а потім і похилий транспортери.
Одночасно отримує живлення реле часу КТ2, що з більшої, ніж у КТ1, витримкою часу вмикає магнітний пускач КМ1. Візок із гноєм рухається в сховище, де автоматично розвантажується і кінцевим вимикачем SQ1 реверсується. Повернення візка фіксується кінцевим вимикачем SQ2, що вмикає реле часу КТ1, і процес повторюється.
Коли збирання гною буде закінчена, та його надходження у візок припиниться, кінцевий вимикач SQ3 залишиться в попередньому положенні. Контакти КТ1:3 у колі KV замкнуться з витримкою, що перевищує тривалість циклу роботи установки, контакт KV1 вимкне установку з мережі.
Потокова лінія прибирання гною призначена для збирання гною та видалення його з приміщення, транспортування за допомогою поршневого насоса до гноєсховища.
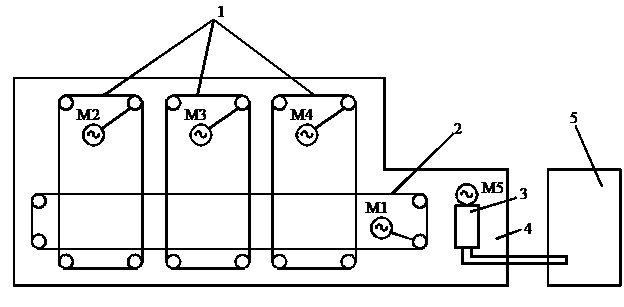 Рис. 2.4.7. Технологічна схема автоматизації потокової лінії прибирання гною:
Рис. 2.4.7. Технологічна схема автоматизації потокової лінії прибирання гною:
1 — поздовжні транспортери; 2 - поперечний транспортер; 3 — поршневий насос; 4 — гноєзбірник; 5 — гноєсховище
До складу потокової лінії входять три поздовжніх транспортери 1 (рис..2.4.7), що прибирають гній із зони розміщення тварин, поперечний 2, який транспортує його до гноєзбірника 4, і поршневий насос 3, який перекачує гній до гноєсховища 5. Привід механізмів здійснюється від асинхронних електродвигунів M1 - М5.
Схемою автоматизації передбачено ручне та автоматичне керування двигунами. При ручному керуванні двигуни вмикають і вимикають кнопками SB1 - SB10 (рис. 2.4.8.). В автоматичному режимі роботою механізмів керують програмні пристрої КТ1 і КТ5 та реле часу КТ2 - КТ4. В встановлений час програмне реле КТ1 замикає контакт і вмикає реле часу КТ2, КТ3, КТ4. Реле КТ4 своїми контактами вмикає пускачі КМ1 двигуна поперечного транспортера і КМ2 двигуна першого поздовжнього транспортера.
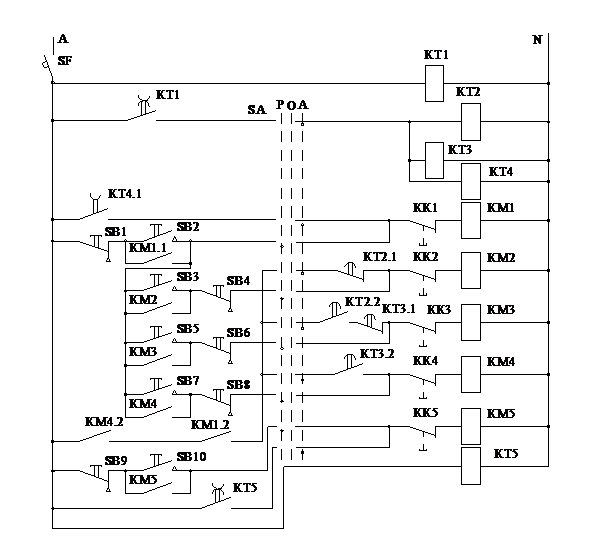
Рис. 2.4.8. Принципіальна електрична схема автоматизації потокової лінії прибирання гною.
Через проміжок часу, достатній для прибирання гною першим поздовжнім транспортером, спрацьовує реле КТ2, яке вимикає пускач КМ2 і вмикає пускач КМ3 двигуна другого поздовжнього транспортера. По закінченні прибирання гною другим поздовжнім транспортером спрацьовує реле часу КТ3, яке подає команду на вимикання другого і вмикання третього поздовжнього транспортера. Через час від початку вмикання програмний пристрій КТ1 розмикає свій контакт і вимикає реле часу КТ2 - КТ4. Пускач KM4 вимикає двигун М4 третього транспортера. Через час достатній для звільнення від гною поперечного транспортера, реле часу КТ4 вимикає пускач КМ1. Двигун поршневого насоса М5 вмикається і вимикається пускачем КМ5 за командами програмного пристрою КТ5.
Захист силових кіл і кіл керування здійснюється автоматичними вимикачами, захист електродвигунів від перевантажень — тепловими реле КК1 – КК5.
Пневматичне транспортування гною призначене для транспортування гною з тваринницьких приміщень в гноєсховище за допомогою повітря. Система видалення гною з пневматичним транспортуванням його в сховище приведена на рисунку 2.4.9. За цією технологією гній з каналу 6 переміщається спочатку подовжнім, а потім поперечним транспортером у гноєзбірник 5, що закривається після заповнення затвором 10. З ресивера 1 через повітряний клапан 11 у гноєзбірник подається стиснене повітря, який витісняє гній через трубопровід 12 у гноєсховище.
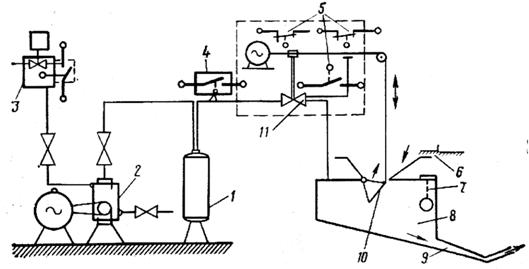
Рисунок 2.4.9. Схема збирання гною пневмотранспортом:
1 — ресивер; 2 — компресор; 3 — регулятор тиску; 4 — електроконтактний манометр; 5 — кінцеві вимикачі; б — гноєзбиральний канал; 7 — датчик рівня; у — гноєзбірник; 9 — трубопровід; 10 — затвор; 11 — повітряна заслінка.
Схема системи керування передбачає автоматичний і ручний режими роботи гноєзбиральної установки (рис. 2.4.10). В автоматичному режимі перемикач режимів SA1 встановлюють у положення А, схема вмикається, і одержує живлення звукова сигналізація НА. Програмне реле часу КТ1 контактами КТ1:1 вмикає реле KV1. Контакт KV1:2 знімає звуковий сигнал, а KV1:3 вмикає магнітні пускачі КМ1, КМ2 і КМ3 поперечного і двох подовжніх транспортерів збирання гною.
Після спрацьовування датчика рівня SL1 вимикається магнітний пускач КМ1, гноєзбиральні транспортери I і II зупиняються. Одночасно вмикається клапан подачі повітря Y1 і магнітний пускач КМ4 керування компресором.
Коли тиск у гноєзбірнику досягне норми, вмикається реле KV2 і реле часу КТ2. З витримкою часу 2...5с контакт КТ2:2 вмикають привод КМ6 затвора гноєзбірника, при цьому відкриється клапан подачі повітря, а КМ6 вимкнеться кінцевим вимикачем SQ2.
Після витиснення гною тиск у системі знизиться, замкнуться контакти SP2 і ввімкнеться магнітний пускач КМ5. Відкриється затвор гноєзбірника, а вентиль подачі повітря закриється.
У крайнім положенні електропривод затвора вимикається кінцевим вимикачем SQ1. Реле KV2 запобігає повторному закритті заслінки гноєзбірника.
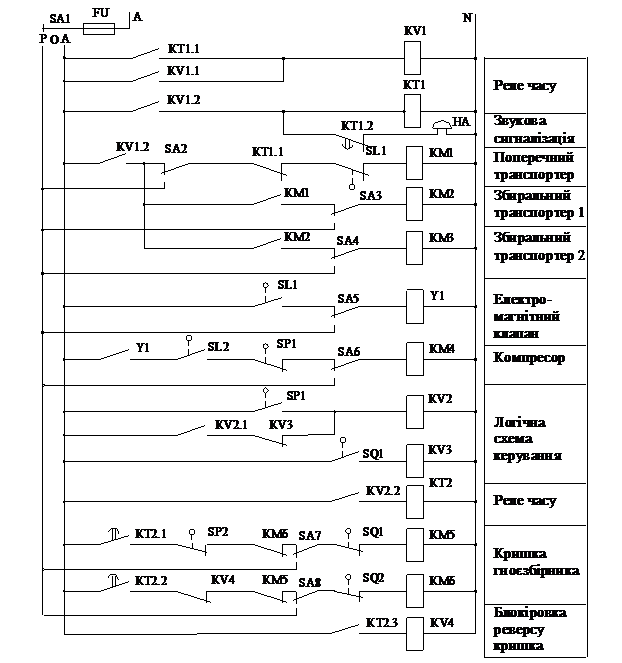
Мал. 2.4.10. Принципова схема прибирання гною пневмотранспортуванням.
ЗАПИТАННЯ
1. Які автоматичні операції здійснюються в установці по видаленню гною з використанням візків? 2. Для чого призначена установка прибирання гною пневмотранспортуванням? 3. Які автоматичні операції здійснюються в установці прибирання гною пневмотранспортуванням? 4. Для чого призначена потокова лінія прибирання гною? 5. Якими пристроями здійснюється автоматичне керування в потоковій лінії прибирання гною?
ТЕСТИ
1. З чого складається лінія видаленню гною з використанням візків?
A. Лінія складається з транспортера ТСН-3Б та візка.
B. Лінія складається з транспортера ТСН-3Б та візка, який рухається в гноєсховище по рельсі підвісної дороги.
C. Лінія складається з транспортера ТСН-3Б та гною, який рухається в гноєсховище по рельсі підвісної дороги
2. В якій установці використовуються два реле часу, три кінцевих вимикачі?
A. В установці для прибирання гною ТСН-160А з захистом скребків від примерзання.
B. В установці прибирання гною пневмотранспортуванням.
C. В установці по видаленню гною з використанням візків.
3. В якій установці використовуються два реле часу, два кінцевих вимикачі та контактних датчика рівня, реле тиску?
A. В установці по видаленню гною з використанням візків.
B. В установці для прибирання гною ТСН-160А з захистом скребків від примерзання.
C. В установці прибирання гною пневмотранспортуванням.
4. За допомогою принципової електричної схеми установки по видаленню гною з використанням візків вкажіть для чого використовується реле часу КТ1?
A. Реле часу КТ1 з витримкою часу, необхідної для очищення від гною, зупиняються спочатку горизонтальний, а потім і похилий транспортери.
B. Реле часу КТ1 з витримкою часу, вимикають спочатку горизонтальний, а потім і похилий транспортери
C. Реле часу КТ1 з витримкою часу, вмикають спочатку горизонтальний, а потім і похилий транспортери
5. За допомогою принципової електричної схеми установки по видаленню гною з використанням візків вкажіть для чого використовується реле часу КТ2?
A. Реле часу КТ2, з витримкою часу вимикає магнітний пускач КМ1 привода візка.
B. Реле часу КТ2, з витримкою часу вимикає магнітний пускач КМ2 привода візка.
C. Реле часу КТ2, з витримкою часу вмикає магнітний пускач КМ1 привода візка.
6. За допомогою принципової електричної схеми установки по видаленню гною з використанням візків вкажіть для чого використовується кінцевий вимикач SQ1?
A. Для автоматичного реверсу електродвигуна візка в гноєсховищі.
B. Для автоматичної зупинки електродвигуна візка при повернені його під завантажувальний транспортер гною.
C. Коли візок наповнений гноєм, спрацьовує ваговий пристрій і через кінцевий вимикач SQ1 вимикає реле часу КТ1 та вмикає КТ2.
7. Де розміщуються кінцеві вимикачі в установці по видаленню гною з використанням візків
A. Кінцевий вимикач SQ1 знаходиться під візком – для вмикання привода візка при наявності гною, SQ2 на початку руху – під завантажувальним транспортером, SQ3 - на кінці руху візків в гноєсховищі
B. Кінцевий вимикач SQ1 знаходиться на початку руху – під завантажувальним транспортером, SQ2 - на кінці руху візків в гноєсховищі, SQ3 під візком – для вмикання привода візка при наявності гною.
C. Кінцевий вимикач SQ1 знаходиться на кінці руху візків в гноєсховищі, SQ2 на початку руху – під завантажувальним транспортером, SQ3 під візком – для вмикання привода візка при наявності гною.
8. Як працює система прибирання гною пневмотранспортуванням
A. Гній переміщається у гноєзбірник, подається вода, що витісняє гній через трубопровід у гноєсховище.
B. Гній переміщається у гноєзбірник, який закривається після заповнення, подається стиснене повітря, що витісняє гній через трубопровід у гноєсховище.
C. Гній переміщається у гноєзбірник, який закривається після заповнення, подається розріджене повітря.
9 Використовуючи принципову електричну схему потокової лінії прибирання гною вкажіть яким пристроєм здійснюється автоматичне вмикання лінії?
A. В встановлений час програмне реле КТ1 замикає контакт і вмикає реле часу КТ2, КТ3, КТ4.
B. В встановлений час програмне реле КТ2, КТ3, КТ4 замикає контакт і вмикає лінію.
C. В встановлений час програмне реле КТ5 замикає контакт і вимикає реле часу КТ2, КТ3, КТ4
2.5. АВТОМАТИЗАЦІЯ ДОЇЛЬНИХ УСТАНОВОК ТА МАШИН ПЕРВИННОЇ ОБРОБКИ МОЛОКА.
2.5.1. Автоматизація доїльних установок.
В залежності від способу утримання корів в зимовий і літній періоди, а також від прийнятої системи організації машинного доїння застосовують різні доїльні установки, які можна розділити на три основних типи: стаціонарні для доїння в стійлах (доїльні апарати переміщають від корови до корови); стаціонарні для доїння на площадках (корови переміщаються до доїльних апаратів); універсальні пересувні для доїння на пасовищах (корови переміщаються до доїльних апаратів).
Як об’єкт автоматизації доїльні установки являють собою складні технологічні системи, на яких реалізуються цілий ряд взаємопов'язаних технологічних процесів і окремих операцій. Це підготовка вимені до доїння, стимуляція молоковіддачі, доїння, збір молока з попереднім очищенням та обліком, миття доїльної апаратури і ін.
Головним і найбільш складним та відповідальним є процес доїння. Його складність пов’язана з біологічною основою. Враховуючи фізіологічні особливості тварин було досліджено, що в процесі доїння корови молоковіддача проходить нерівномірно. Спочатку молоковіддача проходить по зростанню, а через 40…45с досягає максимального значення. Потім протягом 3…4хв проходить інтенсивна віддача, а подальше молоковіддача різко знижується.
Із машинних способів доїння в нинішній час використовують в основному спосіб відсмоктування молока при допомозі вакууму (можливий спосіб механічного вижимання).
Будова та принцип дії доїльних апаратів інших типів мають незначні відмінності. Для механізації та автоматизації процесів доїння при утриманні корів на прив’язі використовують доїльні установки з доїнням у відра ДАС-2Б і АД-100Б, а також молокопровідні доїльні агрегати АДМ-8. Для обслуговування тварин при безприв’язному їх утриманні й доїнні в доїльних залах – доїльні установки, "Тандем-автомат" УДА-8А, "Ялинка-автомат" УДА-16А та "Карусель" УДА-100. Доїння в літніх таборах та на пасовищах здійснюється доїльними установками УДС-3Б і ін.
Установка "Тандем-автомат" УДА-8А призначена для машинного доїння корів у доїльних станках ( на 8 місць) з індивідуальним впуском тварин, транспортування молока в молочне відділення, його фільтрації та охолодження.
Установка "Ялинка-автомат" УДА-16А призначена для машинного доїння корів у групових доїльних станках і первинної обробки молока. Складається вона з двох секцій, кожна на вісім корів.
Установка "Карусель" УДА-100 призначена для машинного доїння корів на конвеєрі в індивідуальних станках, первинної обробки молока. Вона може обслуговувати до 800 голів. Пропускна здатність – 104 голови за год.
Установка УДС-3Б являє собою доїльний майданчик зі станками паралельно-прохідного типу, яка забезпечує доїння корів, збір молока та його охолодження, а також підкормку тварин.
Доїльні апарати установок машинного доїння корів уніфіковані. Як і в апараті АДУ управління змінним вакуумом в них здійснюється пульсатором (регулятор прямої дії). Підтримання параметрів вакууму вакуумнасосу виконується також регуляторами вакууму прямої дії. Отже при доїнні у відра принципи керування доїльною установкою зводиться до забезпечення прямого пуску асинхронного двигуна вакуумнасосу та його захисту.
При доїнні в молокопровід та в індивідуальних і групових доїльних станках крім процесу доїння передбачають, збір молока з попереднім очищенням та обліком, миття доїльної апаратури, годівлю тварин і інші технологічні операції. Це вимагає впровадження принципів програмного керування послідовністю та тривалістю здійснення операції, проведення індивідуального та групового обліку молока, контролю проходження процесів. Для прикладу детально розглянемо роботу доїльного автомату МД-Ф-1 та доїльного агрегату АДМ8А-1.

Рисунок 2.5.1. Принципова конструктивна схема маніпулятора МД-Ф-1:
1 - циліндр додоювання; 2 - циліндр виведення доїльного апарата з-під корови; 3 - кран: 4 - пневмодатчик; 5 - головка; 6 - скоба; 7 - клапан; 8 - поплавок: 9 - калібрований отвір; 10 - затискач; 11- пульсатор; 12 - доїльний апарат; а і б - штуцери підведення Вакууму до циліндрів; І - повітропровід чистого повітря; II - силовий вакуумпровід; III - молокопровід; IV- технологічний вакуумпровід
Доїльний маніпулятор МД-Ф-1 (рисунок 2.5.1) призначений для підтримки доїльного апарату в неробочому положенні, полегшення надівання доїльних стаканів на вим'я корови, і пристосуванню підвісної частини апарату до різних розмірів та форм вимені корів, автоматичного контролю інтенсивності виведення молока з вимені, автоматичного виконання машинного додоювання, відключення апарата від джерела вакууму, зняття стаканів з дійок і виведення апарата з-під корови. Виконавчий механізм маніпулятора підтримує підвісну частину доїльної апаратури при надіванні доїльних стаканів на вим'я корови, а також автоматично виконує операції за командами апарата керування. Автомат керування контролює інтенсивність молоковіддачі і подає сигнали на пневмоциліндри виконавчого механізму маніпулятора.
Основним функціональним вузлом автомата керування є пневмодатчик 4. Працює пневмодатчик так: вихідне положення, коли головка 5 знаходиться на скобі 6 і молоко надходить до його камери, а виливається через калібрований отвір 9. Із збільшенням інтенсивності молоковіддачі поплавок 8 спливає і звільнює скобу 6, яка під дією власної маси перекидається і починається автоматичний контроль процесу доїння. Основна маса молока витікає через обвідний канал у молокопровід. При зменшенні інтенсивності молоковіддачі до 400 г/хв. молоко виводиться лише через калібрований отвір 9, поплавок 8, з'єднана з ним головка опускається вниз, отвір каналу штуцера і головки з'єднується з постійним вакуумом циліндра додоювання, який через важіль маніпулятора відтягує доїльні стакани вниз, що забезпечує механічне додоювання. При інтенсивності молоковіддачі менше 200 г/хв., поплавок опускається ще нижче, клапан 7 відключає доїльні стакани від молокопроводу, у піддійкові камери через отвори в колекторі надходить атмосферний тиск, канал штуцера 6 головки підключає до циліндрів зняття і піднімання маніпулятора вакуумметричний тиск. Доїльні стакани знімаються і виводяться з-під корови. Кран 3 призначений для примусового включення підйому й підтримання доїльних стаканів при їх одіванні на вим'я. Встановлюється маніпулятор на вертикальному стояку станка або на додатково змонтованій опорі.
Доїльний агрегат АДМ - 8А-1 призначений для машинного доїння корів в стійлах, транспортування видоєного молока в молочне відділення, групового обліку видоєного молока від 50 корів, фільтрації, охолодження і збору його в резервуар для зберігання. Для охолодження і зберігання молока рекомендується використовувати в комплекті з агрегатом: резервуари-охолоджувачі; холодильну установку. Для отримання гарячої води рекомендується використовувати електроводонагрівачі ємністю 400л.
Загальний вигляд розміщення доїльного агрегату показано на рисунку 2.5.2. Доїльний агрегат складається з скляного молокопроводу і вакуумпроводу, встановлених над стійлами корівника. Доїльні апарати з’єднуються з молокопроводом та вакуумпроводом при допомозі молочно-вакуумних кранів. В приміщенні молочної змонтована система первинної обробки молока та система промивки агрегату.
Робота доїльного агрегату складається з наступних етапів: підготовка доїльного агрегату до доїння; підготовка вимені корів до доїння і установка доїльних апаратів; доїння; замір молока, надоєного від кожної корови(при контрольному доїнні); транспортування молока в молочне відділення; замір видоєного молока від групи корів; фільтрація молока; охолодження молока; подача молока до резервуара для зберігання; промивка і дизинфікування доїльного агрегату.
Підготовка доїльного агрегату до доїння включає в себе переддоїльне полоскання та переддоїльну сушку агрегату. Під час переддоїльного полоскання відбувається пуск холодної води в бак, регулювання рівня рідини, полоскання доїльних апаратів та молокопроводів. Вода при цьому проходить по шляху через нижній відсмоктувальний патрубок на доїльні апарати через молокопровід і при допомозі молочного насоса і крана циркуляційної промивки в каналізацію. Переддоїльна сушка агрегату здійснюється через перемикач шляхом введення в молокопровід губки, яка забезпечує видалення залишків води. Операції полоскання і сушки здійснюються під дією вакууму.
Підготовка вимені корів до доїння і установка доїльних апаратів здійснюється оператором в такій послідовності: доїльні апарати під’єднують до молочно-вакуумних кранів; перевіряють роботу доїльних апаратів; проводять підготовку вимені; установлюють доїльний апарат на вим’я корови.
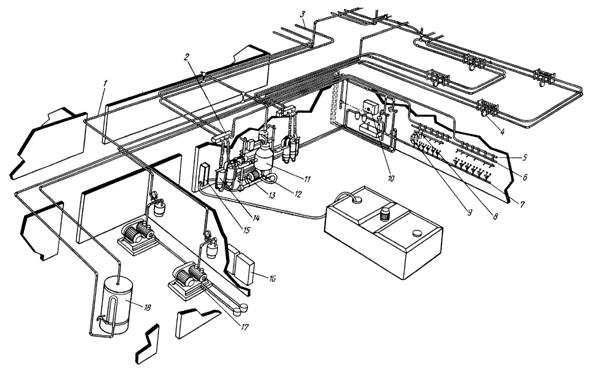
Рисунок 2.5.2. Розміщення обладнання доїльного агрегату АДМ-8: 1- вакуумпровод; 2-перемикач; 3-молокопровод; 4-пристрій підйому; 5-пробка колекторної труби; 6-молочний кран; 7-пристрій промивки; 8-пристрій УЗМ-1; 9-доїльна апаратура; 10-апарат промивки; 11-молокоприймач; 12-молочний насос;13-молочний фільтр; 14-дозатор; 15-охолоджувач; 16-шафа запасних частин; 17-вакуумна установка; 18-електроводонагрівач.
Доїння корів здійснюється у відповідному режимі роботи доїльного агрегату. Доїння побудоване на принципі відсмоктування молока доїльним апаратом з цистерни соска корови під дією вакууму, створеного в системі трубопроводів вакуумними насосами.. Молоко з доїльного апарата направляється в пристрій зоотехнічного обліку (при контрольному доїнні) чи безпосередньо в молокопровід. По молокопроводу воно транспортується в молочне відділення. Необхідне розрідження в системі забезпечується одним вакуумним насосом і вакуумним регулятором.
Принципова електрична схема керування доїльним агрегатом АДМ-8А-1 (рисунок 2.5.3) забезпечує управління: переддоїльною підготовкою агрегату до роботи (полоскання, сушка); доїнням та подальшою подачею молока у резервуари для зберігання; післядоїльною промивкою агрегату (полоскання, циркуляція, полоскання, сушка). Подача напруги на принципову електричну схему управління агрегатом здійснюється автоматичним вимикачем QF. Управління вакуумним насосом М2 в процесі роботи здійснюється кнопками S2.1 та S2.2, молочним насосом М1 - блоком SMM 301/0, автомат промивки - блоком SRM 421. Підготовка до роботи блоків SMM 301/0 та SRM 421 виконується відповідно вимикачами SA1Та SA2.
Робота блока управління автоматом промивки виконується в два етапи: промивка перед доїнням; промивка після доїння, які в свою чергу також поділяються на етапи згідно програми командного пристрою автомата промивки (рисунок 2.5.3).
Запуск автомата промивки здійснюється натисканням кнопки S9. При цьому через контакти 24 і 23 пускача К1 запускається двигун М привода командних дисків. Пускач блокується через контакти 34 і 33 та контакти 1 і 4 кінцевого вимикача S2. Після повороту валика програмних дисків до поділки 23 перший диск (зі сторони двигуна) перемикає кінцевий вимикач S1. При цьому двигун живиться додатково через контакти 1 і 2 кінцевого вимикача S1. При поділці 25 другого диска кінцевим вимикачем S2 обезживлюється пускач К1. Двигун продовжує працювати до поділки 32 першого диску, де відбувається його вимкнення кінцевим вимикачем S1. Програма зупиняється до наступного пуску кнопкою S9 при післядоїльному митті. Кінцеві вимикачі S3, S5, S7 Служать для управління електропневматичними вентилями Y1, Y2, Y3, які видають пневмосигнал на виконавчі органи відповідно циркуляції води, подачі холодної та гарячої води. Кінцевий вимикач S6 служить для дистанційного управління молочним насосом в кінці промивки, а S4 забезпечує роботу кола живлення пускача вакуумного насоса КМ2. S8 залишається не задіяним, тобто резервним.
Молоко при доїнні (мийний розчин при промивці) з молокопроводу поступає в молокозбірник і накопичуюється в ньому. По мірі заповнення молокозбірника поплавок з магнітом підіймається і діє на магнітоуправляємі контакти Max (рисунок 2.5.3) і подається сигнал на управління та вмикає магнітний пускач КМ1 електродвигуна молочного насоса М1. При зниженні рівня молока в молокозбірнику до Min поплавковий датчик здійснює відключення електромагнітного пускача КМ1 електродвигуна молочного насоса.
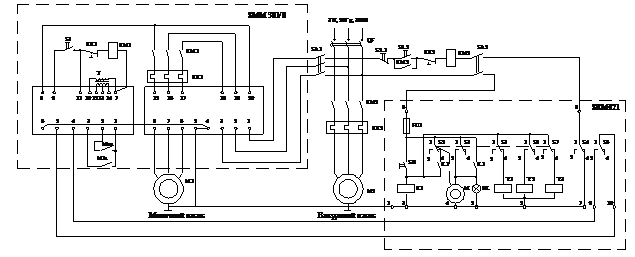
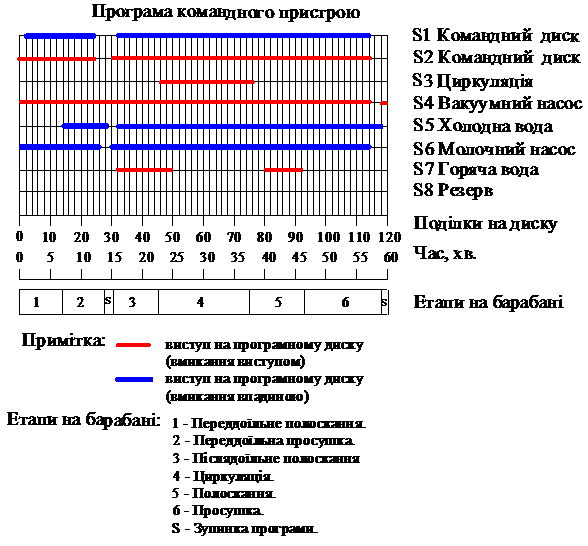
Рисунок 2.5.3. Принципова електрична схема доїльного агрегату АДМ – 8А-1
Датчик включення молочного насоса працює таким чином, щоб певна порція молока завжди знаходилася в молокозбірнику, забезпечуючи при цьому неможливість попадання повітря в молочний насос. Ручне керування молочним насосом здійснюється натисканням кнопки S1, блока SMM 301/0. Молочний насос в даному випадку працює поки кнопка S1 знаходиться в замкненому стані. Живлення плати управління здійснюється від блока живлення виконаного на трансформаторі Т1.
ЗАПИТАННЯ
1. Технологічні основи доїння корів. 2. Принцип дії дво - і трьохтактних доїльних апаратів. 3. Залежно від чого приймають різні способи доїння корів? 4. Які операції на доїльних установках підлягають автоматизації? 5. Які автоматизовані операції виконує маніпулятор автомата МД-Ф-1? 6. Призначення доїльного агрегату АДМ-8А-1 та принципи його автоматизації?
ТЕСТИ
1. При роботі двохтактного доїльного апарата в такт стискання відбувається?
A. Відсмоктування молока з вимені корови.
B. Стимуляція молоковіддачі.
C. Відпочинок корови.
2. При прив’язному утримані корів в стійлах використовують.
A. Доїльні установки з доїнням у відра та молокопроводи.
B. Універсальні пересувні доїльні установки.
C. Доїльні агрегати з доїнням у молокопроводи.
3. Об’єм автоматизації автомата МД-Ф-1в процесі доїння.
A. Автоматичний контроль інтенсивності виведення молока з вимені, автоматичне виконання машинного додоювання, відключення апарата від джерела вакууму, зняття стаканів з дійок і виведення апарата з-під корови.
B. Автоматичне вимикання електроклапана подачі вакууму по закінчені молоковіддачі коровою за допомогою датчика - уловлювача молока.
C. Автоматичне вмикання електроклапана подачі вакууму при інтенсивній молоковіддачі.
4. Призначення доїльного агрегату АДМ-8А1.
A. Для машинного доїння корів в доїльних залах, групового обліку видоєного молока, фільтрації, охолодження і збору його в резервуар для зберігання.
B. Для машинного доїння корів в стійлах, транспортування видоєного молока в молочне відділення, групового обліку видоєного молока, фільтрації, охолодження і збору його в резервуар для зберігання.
C. Для машинного доїння корів в літніх таборах та майданчиках, групового обліку видоєного молока, фільтрації, охолодження і збору його в резервуар для зберігання.
5. Використовуючи принципову електричну схему доїльного агрегату АДМ-8А1, вкажіть принцип дії датчика рівня молока у молокозбірнику.
A. В молокозбірнику використовується поплавково-клапанний датчик рівня.
B. В молокозбірнику використовується поплавково-герконний датчик рівня.
C. В молокозбірнику використовується електродний датчик рівня.
6. Використовуючи принципову електричну схему доїльного агрегату АДМ-8А1, вкажіть призначення блока SMM 301/0.
A. Для керування молочним насосом при транспортуванні молока в резервуар для його зберіганні.
B. Для керування етапами роботи доїльного агрегату: переддоїльна підготовка молокопроводу, доїння; післядоїльна обробка молокопроводу.
C. Для керування вакуумнасосом у всіх етапах роботи доїльного агрегату.
7. Використовуючи принципову електричну схему доїльного агрегату АДМ-8А1, вкажіть чим забезпечується керування етапами роботи доїльного агрегату.
A. Програмним пристроєм автомата промивки.
B. Перемикачами SA1, SA2.
C. Датчиками рівня молока в молокозбірнику.
2.5.2. Автоматизація первинної обробки молока.
Молоко, особливо свіжонадоєне (при температурі 35-36°С), є сприятливим середовищем для розвитку будь-яких шкідливих і корисних мікроорганізмів. Бактеріальне забруднення молока залежить від умов утримання тварин, способу доїння, чистоти приміщень, апаратури тощо. Кількість мікроорганізмів у молоці збільшується навіть при нетривалому його зберіганні. Щоб запобігти збільшенню кількості мікроорганізмів, особливо молочнокислих, слід швидко видалити молоко з корівника, очистити і охолодити його (до температури 4- 6 °С) і, зберігати при низькій температурі, а також впровадити додержання санітарно - гігієнічних правил утримання доїльних апаратів і доїння - в окремих випадках - теплову обробку (пастеризацію).
Первинна обробка молока, яку проводять для поліпшення санітарно-гігієнічних властивостей молока, підвищення його стійкості при транспортуванні і зберіганні, полягає в очищенні молока від сторонніх домішок (фільтрування), охолодженні і пастеризації.
Для очищення молока використовують фільтри та відцентрові молокоочисники. Пастеризація молока може бути тривалою, що проходить в спеціальних ваннах та швидкісною, що проходить в проточних пластинчастих апаратах. Для охолодження молока в молочних відділеннях тваринницьких ферм використовують водоохолоджувальні установки АВ-30, УВ-10, ТХУ-14, які працюють з резервуарами охолодниками молока та проточними пластинчастими охолоджувачами.
Автоматизована пастеризаційна установка ОПФ-1 призначена для відцентрової очистки (видалення механічних і частково бактеріальних домішок), пастиризації (нагрів молока з метою стерилізації), витримки молока і його охолодження.
В автоматизованній пластинчатій пастеризаційно-охолоджувальній установці (рисунок 2.5.4.) робочий процес проходить слідуючим чином. З молокозбірника молоко поступає в урівнювальний бак 1. Насосом 2 молоко подається в секцїю І пластинчатого апарата (секцію рекуперацію), де воно нагрівається за рахунок теплообміну з горячим молоком, що йде від секції пастеризації через витримувач 5. Нагріте до 37…40°С молоко направляється в молокоочисник 4, а звідки подається в ІІ секцію рекуперації, де проходить його донагрів пастеризованим молоком. З другої секції молоко переходить в секцію ІІІ пастеризації, де за рахунок теплообміну з горячою водою нагрівається до температури 76 Чи 90°С (в установці ОПФ-1-300).
Після секції пастеризації молоко проходить через витримувач в І і ІІ секції рекуперації, де віддає частину тепла холодному молоку і його температура знижується до 20..25°С. Подальші це молоко послідовно проходить секції охолодження IV та V, де його температура знижується до 5…8°С в залежності від початкової температури охолоджуючої води.
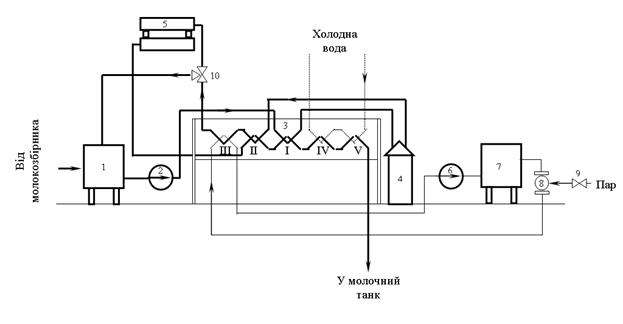
Рисунок 2.5.4. Технологічна схема пастеризатора ОПФ-1: 1 – урівнювальний бак; 2 – молочний насос; 3 – пластинчатий апарат; 4 – молокоочисник; 5 –витримувач; 6 – водяний насос; 7 – бойлер; 8 – інжектор; 9 – електрогідравлічний клапан; 10 – перепускний клапан; І – перша секція рекуперації; ІІ – друга секція рекуперації; ІІІ – секція пастеризації; ІV, V – cекції охолодження.
Холодне молоко направляється в танки для зберігання. Витримувач в установці служить для посилення пастеризаційного ефекта. Горяча вода готується в бойлері 7. Вона нагрівається паром, поступаючим в систему циркуляції горячої води через інжектор 8 паропроводу котельної установки. При зниженні температури молока, що виходить із секції пастеризації перепускним клапаном молоко направляється в вирівнювальний бак повторну пастеризацію. Регулювання подачі пару здійснюється автоматично електрогідравлічним клапаном в залежності від температури пастеризованого молока.
Згідно з принциповою електричною схемою (рисунок 2.5.5) підготовка установки до роботи здійснюється за допомогою ввідного вимикача QS. При цьому загорається сигнальна лампа HL1, яка сигналізує про подачу напруги на пульт керування. Вимикачем SA1 готується до роботи логометрична установка Р, яка служить для контролю температури охолодженого молока. Перемикачами SA2, SA3 задається ручний чи автоматичний режим керування пастеризацією молока, а перемикачем SA4 в ручному режимі здійснюється керування кількістю подаваємого пару для забезпечення необхідної температури пастеризації.
В автоматичному режимі керування за допомогою кнопкових постів SB1-SB6 вмикаються електродвигуни молочного насоса М1, насоса горячої води М2 та молокоочисника М3. Кнопкою SB7 вмикаються кола сигналізації режимів пастеризації. В початковий момент коли температура молока на виході з секції пастеризації меньше 76 (90)°С терморегулятор А1 Типу МСР-1-01 своїм замикаючим контактом подає напругу на котушку проміжного реле KL2 і електромагніт Y1 перепускного клапана. Молоко з секції пастеризації направляється на урівнювальний бак на повторну пастеризацію. При цьому в колах сигналізації блокується котушка проміжного реле KL1 і сигнальна лампа НL5 сигналізує про подачу молока на допастеризацію. Після первинного циклу пастеризації, якщо температура молока відповідатиме нормі А1 Вимкне реле KL2 та Y1 Молоко з секції пастеризації через витримувач буде направлене в секції ІІ, І і подальші через секції охолодження ІV, V в молочний танк.
В процесі пастеризації при недопустимих зниженнях темпрератури молока, воно також відправляється на повторну пастеризацію. Схема автоматизації працюватиме аналогічно описаному вище, але крім того разом з сигнальною лампою HL5 вмикається також звукова сигналізація НА.
При незначних відхиленнях температури пастеризовного молока, яка контролюється на виході з витримувача за допомогою RK3, імпульсним регулятором А2 типу ЭР-СС-63 через вихідні реле KL3 та KL4 здійснюється автоматичне керування подачею пару в систему підігріву води, що використовується для пастеризації молока. Закриття подачі пару здійснюється електромагнітом Y2, а відкриття електромагнітом Y3.
Також принциповою електричною схемою передбачено захист силових кіл від коротких замикань який здійснюється запобіжниками FU1-FU9, захист електродвигунів тепловими струмовими реле КК1-КК3, захист кіл керування від коротких замикань за допомогою FU10, та світлова сигналізація про роботу відповідного електродвигуна, яка здійснюється лампами HL2-HL4.
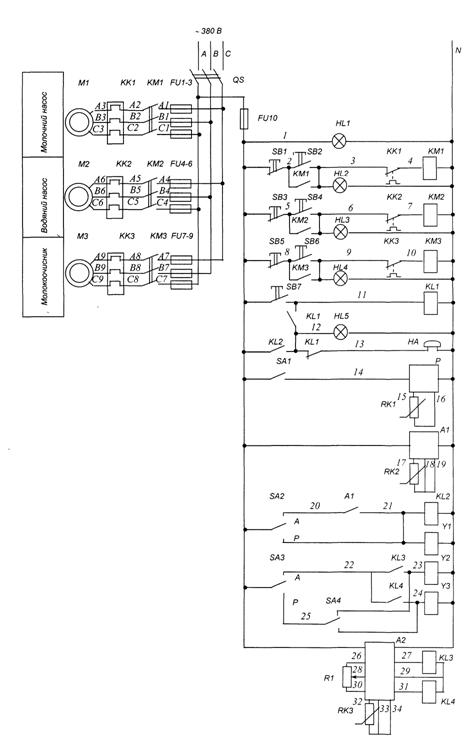
Рисунок 2.5.5. Принципова електрична схема установки ОПФ-1.
Танк – охолодник молока ТОМ-2А призначений для збирання, охолодження і зберігання молока на фермі, де розміщується до 400 корів. Він складається з молочної ванни 9 (рис. 2.5.6) з мішалкою 8, фреонового компресора 1, конденсатора 2, ресивера З, фільтра - осушника 4, теплообмінника 5, випарника б, водяного насоса 7, акумулятора холоду.
За 3 - 4 год. до початку доїння вмикають компресор й здійснюють попереднє охолодження води в акумуляторі холоду та наморожування льоду на панелях випарника. Це відбувається внаслідок руху фреону по замкненому контуру. Пари фреону, які відсмоктуються з випарника 6, компресором 1 стискаються, нагріваються й нагнітаються у конденсатор 2. У ньому фреон охолоджується повітряним потоком, який утворюється за допомогою вентилятора, віддає тепло, стає рідким й зливається до ресивера 3. Під тиском він надходить до фільтра - осушника 4, очищується від парів масла, охолоджується зустрічним потоком парів фреону у теплообміннику 5 і крізь отвір у терморегулювальному вентилі впорскується у внутрішню порожнину пластин випарника 6. Опинившись у розрідженому просторі, фреон кипить (переходить з рідкої у газоподібну фазу) зі споживанням теплоти.
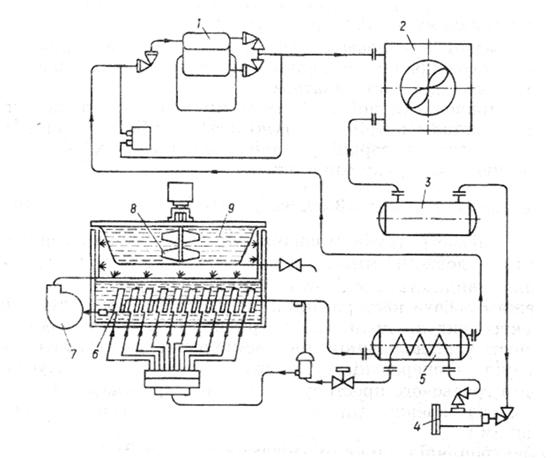
Рисунок. 2.5.7. Технологічна схема танка-охолодника молока ТОМ-2:
1 — компресор; 2 — конденсатор; 3 — ресивер; 4 — фільтр - осушник; 5 — теплообмінник; 6 — випарник; 7 — водяний насос; 8 — мішалка; 9 — молочна ванна.
При цьому пластини випарника охолоджуються до мінус 8-10 С і на них наморожується вода, в яку вони занурені.
Перед початком подавання молока вмикають мішалку 8 і водяний насос 7. Холодна вода омиває днище молочної ванни та охолоджує молоко, що надходить до неї.
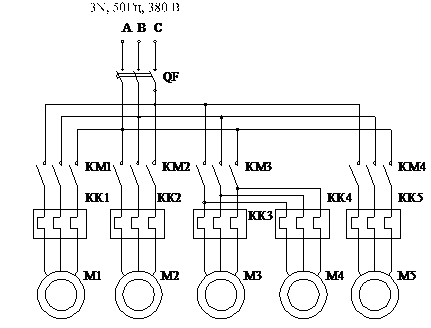
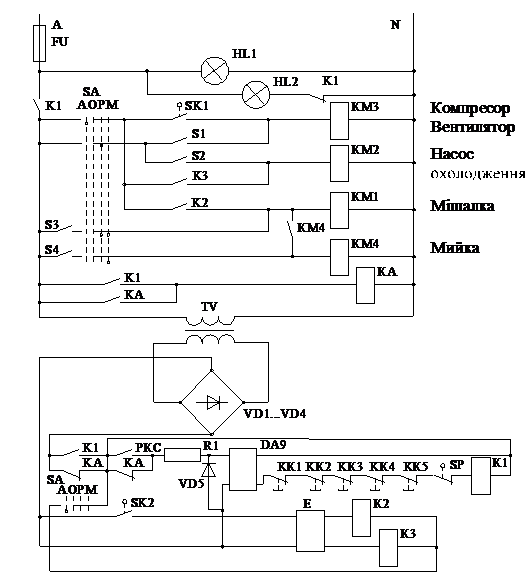
Рисунок. 2.5.7. Принципова електрична схема Танка-охолодника молока ТОМ-2.
Принципіальну електричну схему керування танком-охолодником молока ТОМ-2А наведено на рис. 2.5.7.
При вмиканні автоматичного вимикача QF напруга живлення подається на головні контакти магнітних пускачів КМ1 - KM 4 та на коло керування, при цьому загоряються лампи HL1, HL2. Схема передбачає три режими роботи: ручний, автоматичний, миття.
У положенні перемикача SA "Ручний" керування електроприводами здійснюється тумблерами S1, S2, S3, S4 у колах відповідних магнітних пускачів. Вмиканням тумблера S1 у ручному режимі здійснюється початкове наморожування льоду на панелях випарника.
У положенні перемикача SA "Автоматичний" керування технологічним циклом реалізується за допомогою блока логічного керування Е залежно від стану контакту датчика температури SK2. Блок Е призначений для вироблення тимчасових сигналів необхідної тривалості, забезпечення технологічного алгоритму та організації вихідних сигналів у вигляді "сухих" контактів герконових реле К2 і КЗ. Як датчик температури використовується термоконтакт SK2, контакт якого замкнений ртутним стовпчиком при температурі + 4 0С та вище. Логічний сигнал про необхідність вмикання системи охолодження, надходячи до блока Е, викликає спрацювання вихідних реле К2 і К3. Замикаючий контакт реле К2, який увімкнено в коло котушки магнітного пускача КМ1, забезпечує роботу мішалки, а контакт К3 вмикає пускач КМ2 і подає команду на ввімкнення насоса охолодження.
Надалі алгоритм керування передбачає таке функціонування схеми керування:
• за умов досягнення в процесі охолодження молока температури, нижчої за + 4 С, контакт SК2 розмикається, вихідне реле К3 вимикається і відповідно розмикає свій контакт у колі котушки пускача КМ2, що викликає вимикання насоса охолодження;
• мішалка після вимикання системи охолодження працюватиме, а після закінчення часу 3 ± 1 хв. блок Е виробить команду вимикання вихідного реле К2, контакт якого вимкне пускач мішалки КМ1;
• у процесі зберігання охолодженого молока блок Е вмикає мішалку на 3 хв. через кожні 30 хв.;
• через зменшення кількості льоду на панелях випарника, який витрачається на охолодження молока, температура вихідних парів фреону з випарника підвищується, контакти температурного реле SK1 у колі магнітного пускача КМЗ замикаються і вмикається привід компресора і вентилятора;
• для контролю системи мащення компресора передбачене реле РКС. При кожному запуску компресора контакт реле РКС повинен замкнутися протягом 20 с, що контролюється елементом ДА9 (J-312), який у разі успішного функціонування системи замикання контакту РКС не дозволить вимкнутися проміжному реле К1. У випадку, коли контакт РКС за 20 с від початку запуску компресора не замкнеться, електромагнітне реле в елементі ДА9 знеструмиться, контакт його розімкнеться, вимикаючим реле К1, замикаючі контакти К1 розмикаючись вимкнуть ланцюг живлення, що забезпечить аварійне вимкнення устаткування ТОМ-2А;
• за умов неприпустимого підвищення тиску, який контролюється датчиком реле тиску SP, та спрацюванні теплових реле КК1 - КК4 при можливих перевантаженнях електродвигунів M1 - М5 їх розмикаючі контакти знеструмлюють коло живлення реле К1 і відбувається аварійне вимкнення устаткування ТОМ-2А, загоряється сигнальна лампа HL2 "Аварія". Деблокування сигналу "Аварія" відбувається шляхом вимикання ввідного автоматичного вимикача QF та його повторного вмикання;
• технологічна операція "Миття" здійснюється у відповідному положенні перемикача SA. У цьому режимі передбачається керування електроприводом насоса мийки та електроприводом мішалки. Вмикання мішалки та насоса здійснюється за допомогою тумблера S4;
• за умов підвищення температури молока контакти SK2 замикаються і робота схеми повторюється.
Захист електроприводів та електроустаткування ящика керування від струмів короткого замикання забезпечується автоматичними вимикачами.
ЗАПИТАННЯ
1. Яка необхідність первинної обробки молока?. 2. Технологія первинної обробки молока при використанні пастеризаційної установки ОПФ-1? 3. Принципи автоматизації пастеризаційної установки ОПФ-1. 4. З якого обладнання складається танк – охолодник молока ТОМ-2А? 5. Як технологічно працює танк – охолодник молока ТОМ-2А? 6. Які автоматизовані операції виконуються танком – охолодником молока ТОМ-2А?
ТЕСТИ
1. Які операції відносять до первинної обробки молока?
A. Первинна обробка полягає в очищенні молока від сторонніх домішок, його пастеризації та охолодженні.
B. Первинна обробка полягає в Відцентровій очистці молока від сторонніх домішок.
C. Первинна обробка полягає у охолодженні і зберіганні молока на фермі.
2. Для чого призначена пастеризаційна установка ОПФ-1?
A. Для відцентрової очистки і охолодження молока у закритому потоці.
B. Для відцентрової очистки, пастеризації, витримування і охолодження молока у закритому потоці.
C. Для збирання, охолодження і зберігання молока на фермі.
3 . Які засоби автоматизації використовуються в пастеризаторі молока ОПФ-1?
A. Два регулятори температури пастиризації молока та логометрична установка контролю температурии охолодженого молока.
B. Електроклапан подачі пару та перепускний клапан молока.
C. Поплавковий датчик рівня молока в урівнювальному бакові, регулятори температури пастиризації молока.
4. Використовуючи принципову електричну схему ОПФ-1, вкажіть чим керує регулятор температури А1?
A. Контролює температуру молока в секції пастиризації та через перепускний клапан відправляє молоко на допастеризацію при його пониженій температурі.
B. Контролює температуру молока в секції пастиризації та через електрогідравлічний клапан керує подачею пару.
C. Регулює тепературу охолодження молока керуючи потоком холодної води.
5. Використовуючи принципову електричну схему ТОМ-2 вкажіть за допомогою чого здійснюється автоматичне керування технологічним циклом
A. За допомогою блока логічного керування Е залежно від стану контакту датчика температури SK2.
B. За допомогою блока логічного керування Е.
C. За допомогою контакту датчика температури SK2.
6. Використовуючи принципову електричну схему ТОМ-2 вкажіть при якій температурі термоконтакт SK2 замкнений?
A. При температурі + 0 0С та вище.
B. При температурі + 4 0С та вище.
C. При температурі + 8 0С та вище.
7. Використовуючи принципову електричну схему ТОМ-2 вкажіть якими пристроями здійснює керування мішалки в процесі зберігання молока?
A. Програмним пристроєм який вмикає мішалку на 10 хв. через кожні 30 хв.
B. Програмним реле часу який вмикає мішалку на 3 хв. через кожні 60 хв.
C. Блоком Е, який вмикає мішалку на 3 хв. через кожні 30 хв.
8. За допомогою принципової електричної схеми ТОМ-2 вкажіть для чого використовується реле SР1?
A. Для контролю системи мащення компресора.
B. Для контролю тиску фреону.
C. Для контролю молока.
9. За допомогою принципової електричної схеми ТОМ-2 вкажіть коли відбувається аварійне вимикання установки?
A. При підвищення тиску, який контролюється датчиком реле тиску SP.
B. При спрацюванні теплових реле КК1 - КК4 при можливих перевантаженнях електродвигунів M1 - М5.
C. При підвищення тиску, який контролюється датчиком реле тиску SP, та спрацюванні теплових реле КК1 - КК4 при можливих перевантаженнях електродвигунів M1 - М5.
2.6. АВТОМАТИЗАЦІЯ УСТАНОВОК ЕЛЕКТРИЧНОГО ОСВІТЛЕННЯ ТА ОПРОМІНЕННЯ
2.6.1. Автоматизація установок електричного освітлення.
Керування виробничим освітленням повинне забезпечити неОбхідний світловий режим і сприяти економії електроенергії. Найбільш поширені такі способи керування виробничим освітленням: місцеве індивідуальне, місцеве централізоване, автоматичне у функції освітленості, автоматичне централізоване за заданою програмою.
Місцеве індивідуальне керування застосовують у підсобних, Комунально-побутових та інших невеликих за розмірами приміщенНях. Місцеве централізоване керування (з одного місця керують багатьма світильниками) застосовують у корівниках, свинарниках, Майстернях тощо. У коридорах з двома входами застосовують систему місцевого керування з двох місць за допомогою перемикачів. Ця система забезпечує керування освітленням з кожного Місця незалежно від положення перемикача в іншому місці.
Автоматичне керування освітленням у функції освітленості найбільш характерне для управління зовнішнім освітленням за допомогою фотореле. Принципова електрична схема керування освітленням у функції освітленості з використанням фотореле зображена на рисунку 2.6.1. В автоматичному режимі вона працює так. При недостатній природній освітленості опір фоторезистора R3 Великий і струм бази транзистора VT2 Малий. Обидва транзистори будуть закритими. Проміжне реле К Одержить живлення через коло, в яке ввімкнені резистор R1, Діод VD і резистори R2, R4. Реле К Замкне свій контакт в колі живлення котушки електромагнітного пускача KM. Пускач KM спрацює і ввімкне освітлення. Коли природне освітлення досягне заданого рівня, опір фоторезистора зменшиться, зросте струм емітера транзистора VT2, А отже, зросте потенціал на базі транзистора VT1. Транзистор VT1 Відкриється і зашунтує котушку проміжного реле К. Контакт проміжного реле К В колі живлення котушки електромагнітного пускача розімкнеться, що приведе до вимикання освітлення. В схемі передбачено ручне керування за допомогою перемикача SA (положення "Ручне керування").
Дія освітлення на живі організми різноманітна і по-перше визначається інтенсивністю, періодичністю і спектром. Але прийнято рахувати, що найбільшу дію на біологічні процеси життєдіяльності організму тварин і птиці має періодичність тобто зміна тривалості світлого періоду доби і частота зміни темного та світлого періоду.
Найбільш чутливими до даного фактора є птахи, де зміна періодичності дії видимого опромінення дозволяє керувати яйценосністю і підвищувати продуктивність м’ясного напрямку виробництва.
Сучасна наука рекомендує чітко слідкувати за тривалістю світлого періоду доби, та імітувати світанок та сутінки. Автоматичне керування режимами роботи освітлення забезпечує чітке дотримання вказаних вимог.
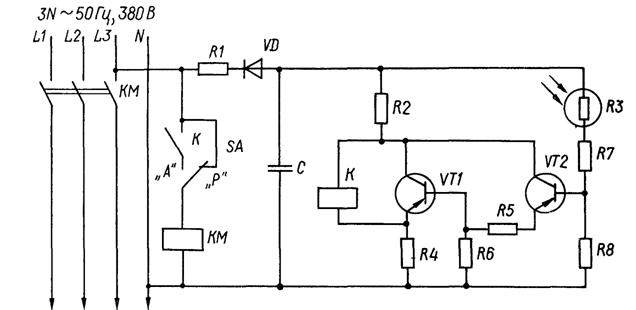
Рисунок 2.6.1. Принципова електрична схема керування освітленням У функції освітленості.
У пташниках з природним та штучним освітленням доступ природного світла обмежений. Освітленість у більшості випадків не перевищує 1% від зовнішньої і різко зменшується до центра приміщення. Разом з тим у світлий час доби на площадках, що примикають до стін з вікнами, рівень природної освітленості може бути цілком достатнім. У подібних приміщеннях повинна бути передбачена можливість відключення рядів світильників, найближчих до світлових прорізів. Керування освітленням у даних випадках може здійснюватися автоматично з використанням фотореле.
В пташниках без вікон необхідне чітке дотримання світлового режиму з забезпеченням необхідної періодичності та тривалості світлого періоду, рівня освітленості, імітації "світанку" і "сутінок".
Для автоматичного керування освітленням у закритих пташниках для забезпечення необхідної періодичності і зміни тривалості світлового дня використовують різноманітні програмні пристрої, наприклад "УПУС", "ПРУС". Принцип дії даних пристроїв побудований на основі годинникового механізму з підзаводом від мікродвигуна.
Пристрій "ПРУС-1" має барабан з вирізом (рисунок 2.6.2.), профіль якого визначає програму роботи освітлювальної установки на весь період вирощування курчат (150 днів) або утримання курок-несучок (400 днів). Барабан приводиться в дію годинниковим механізмом і автоматичним підзаведенням пружини від електродвигуна.
Освітлювальні лампи поділяють на дві групи, які вмикаються електромагнітними пускачами КМ1 І КМ2. Коли спеціальний пристрій, що діє на мікроперемикачі 5, ковзає по поверхні барабана, то контакти останніх замкнені і освітлення ввімкнене. Якщо пристрій знаходиться над вирізом, то контакти мікроперемикачів розімкнуться і почергово з витримкою часу 2...5 хв. вимкнеться освітлення. Вмикаються контакти мікроперемикачами у зворотній послідовності, що забезпечує створення штучних "світанку" та "сутінок".
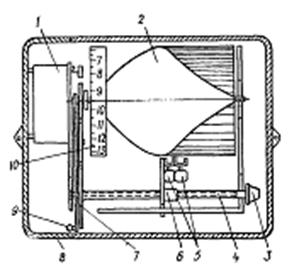
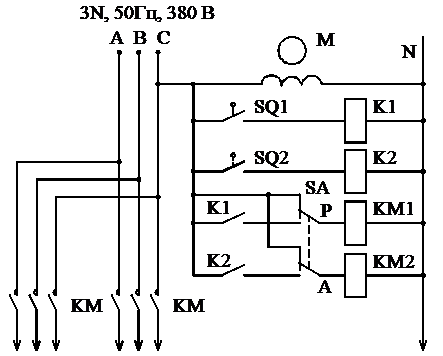
Рисунок 2.6.2. Прилад програмного керування освітленням ПРУС-1: а – будова; б – принципова електрична схема; 1 – годинниковий механізм з мікродвигуном; 2 – програмний барабан; 3 – рукоятка гвинта; 4 – гвинт; 5 – мікроперемикачі; 6 – гайка з плитою; 7 – шестірні; 8 – корпус; 9 – важіль для встановлення незмінної програми; 10 – добова шкала.
Для плавного регулювання інтенсивності електроосвітлення з метою імітації "світанку" та "сутінок" застосовують тиристорні регулятори напруги. Принципова електрична схема автоматичного пристрою "ТИРОС-1" зображена на рисунку 2.6.3. Напруга на освітлювальні прилади надходить з мережі через блок 1, у якому відбувається його комутація тиристорами VS1 і VS2. Блок 2 Забезпечує живлення ланцюгів керування і сигналізації HL1, HL2 І HL3, що показує наявність напруги і положення перемикачів SA2 і SA3. Блок 3 створює витримки часу зниження інтенсивності освітлення, що задаються резисторами R4, R5 і перемикачами SA2 і SA3, встановленими в блоці 3. Пристрій "ТИРОС-1" застосовується на додаток до пристроїв автоматичного керування тривалістю світлового дня.
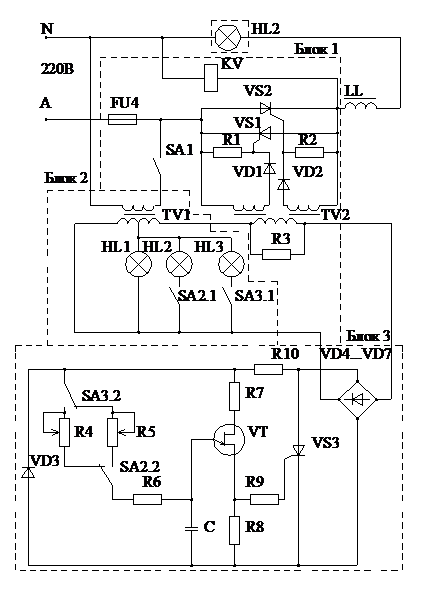
Рисунок 2.6.3. Принципова електрична схема пристрою "ТИРОС-1".
Сучасні пристрої автоматичного керування освітленням у пташниках поєднують в собі мікропроцесорні програматори періодичності та тривалості світлового режиму, тиристорні регулятори освітленості з функцією "світанок – сутінки" та вбудовану систему захисту освітлювальної установки.
ЗАПИТАННЯ
1. Що дає Автоматичне керування освітлювальними установками? 2. За допомогою чого передбачають Автоматичне керування освітленням територій сільськогосподарських підприємств у нічний час? 3. Які особливості керування освітленням у пташниках? 4. Для чого призначений програмний пристрій "ПРУС –1"? 5. Функціональні можливості пристрою керування "ТИРОС"?
ТЕСТИ
1. Для чого передбачають імітацію "світанку" та "сутінок" при управлінні освітленням у пташниках?
A. Для створення рівномірного рівня освітленості в зоні розміщення птахів.
B. Для зменшення травмування птахів при різких змінах освітленості.
C. Для збільшення яйценосності птахів.
2. Імітація "світанку"та"сутінок", при управлінні освітленням у пташниках з використанням пристрою"ПРУС–1" виконується?
A. Двохступінчатим керуванням груп світильників.
B. Трьохступінчатим керуванням груп світильників.
C. Плавним регулюванням напруги живлення світильників
3. Використовуючи принципову електричну схему програмного пристрою "ПРУС–1" вкажіть за допомогою якого пристрою здійснюється вмикання освітлення в ручному режимі?
A. За допомогою контактів проміжного реле К1 і К2.
B. За допомогою перемикача SА.
C. За допомогою контактів проміжного реле К1 і К2 та перемикача SА.
4. Використовуючи принципову електричну схему програмного пристрою "ПРУС –1" вкажіть як здійснюється вмикання освітлення в автоматичному режимі?
A. Програмний пристрій замикає контакти мікроперемикачів SQ1 та SQ2 в колі котушок проміжних реле К1 і К2, які своїми контактами подають напругу на магнітні пускачі КМ1 та КМ2 груп освітлення.
B. Програмний пристрій замикає контакти мікроперемикачів SQ1 та SQ2 в колі котушок магнітні пускачі КМ1 та КМ2 груп освітлення.
C. За допомогою контактів проміжного реле К1 і К2 та перемикача SА.
5. Використовуючи принципову електричну схему пристрою "ТИРОС", вкажіть за допомогою якого засобу здійснюється безпосереднє регулювання напруги на світильниках?
A. За допомогою резисторів R4, R5.
B. За допомогою перемикачів SА2, SА2.
C. За допомогою тиристорів VS1, VS2.
2.6.2. Автоматизація установок ультрафіолетового опромінення.
При промисловій технології вирощування тварин і птахів значне місце відводиться використанню ультрафіолетового опромінення. Ультрафіолетове опромінення з довжиною хвилі 280..315нм (в області – В) в малих дозах позитивно впливає на ріст, розвиток, обмін речовин, продуктивність тварин і птахів. Недостача природного ультрафіолетового опромінення особливо відчутна в осінньо-зимовий період і ранньою весною. Вона часто буває першопричиною порушення обміну речовин, зниження захисних функцій організму і його стійкості до різних захворювань. Під дією цих променів у шкірі тварин відбувається реакція утворення з провітаміну активно діючого вітаміну D, який відіграє важливу роль у регулюванні обміну речовин. При недостачі в організмі вітаміну D розвиваються такі хвороби, як рахіт, ацидоз та інші. Щоб цього не допустити в системах зоотехнічних і ветеринарних заходів передбачається штучна компенсація ультрафіолетової недостачі, в результаті чого на 5…13% підвищуються надої корів, збільшуються на 4…20% середньодобові прирости маси поросят, телят, ягнят і птахів, на 10…15% збільшується яйценосність курей.
Для ультрафіолетового опромінення сільськогосподарських тварин і птахів використовують різні типи опромінювачів і установок: стаціонарні опромінювачі типів ЭО1-30М, ОЭ-1, ОЭ-2, і ОЭСП02-2´40, переносні опромінювачі типів ОРК-2 і ОРКШ, пересувні опромінюючі установки типів УО-4 і УОК-1 та інші.
Основним критерієм ефективності ультрафіолетового опромінення є необхідна кількість опромінення – доза. Вона для кожного виду і віку тварин та птахів визначається на основі біологічних досліджень. Доза опромінення залежить від типу та потужності джерела опромінення, висоти підвісу опромінювача та тривалості процесу опромінення. Структурна схема керування процесом ультрафіолетового опромінення тварин і птахів зображена на рисунку 2.6.4.
Рисунок 2.6.4. Структурна схема Керування Процесом ультрафіолетового опромінення: H – доза опромінення (вхідна дія); T – час опромінення (величина, що керується).
З точки зору автоматизації для стаціонарних і переносних опромінюючих установок тривалість опромінення може бути забезпечена шляхом використання програмних пристроїв. Вони забезпечуватимуть необхідну періодичність включення та тривалість роботи опромінюючої установки протягом доби. При використанні пересувних опромінюючих установок тривалість опромінення обумовлена швидкістю переміщення опромінювачів та кількістю проходів, що вони здійснюють. Отже при керуванні ними використовують принцип управління кількістю проходів, з використанням програмних пристроїі та апаратів керування в функції шляху.
Стаціонарний опромінювач типу ЭО-1-30М (рисунок 2.6.5) призначений для ультрафіолетового опромінення тварин і птахів. В опромінювач входить одна ерітемна лампа типу ЛЭ-30 потужністю 30Вт та одна лампа розжарювання потужністю 40Вт і напругою живлення 127В. Лампа розжарювання використовується в якості баластного опору. Опромінювач складається з кожуха 1, розсіювача 2, що виготовлені з оцинкованої та пофарбованої листової сталі. Всі прилади та арматура розміщенні в кожусі. В опромінював також входить одна ерітемна лампа 3 Типу ЛЭ-30 потужністю 30Вт та одна лампа розжарювання 4 потужністю 40Вт і напругою живлення 127В. Лампа розжарювання використовується в якості баластного опору та як освітлювальний прилад. Для захисту ламп від пошкоджень використовується захисна сітка. Ефективне запалювання ерітемної лампи здійснюється за допомогою трансформатора Т та полоси з алюмінієвої фольги на поверхні лампи.
При управлінні ультрафіолетовим опроміненням з використанням опромінювачів ЭО-1-30М їх поєднують в групи та передбачають програмне керування періодичністю і тривалістю процесу опромінення.
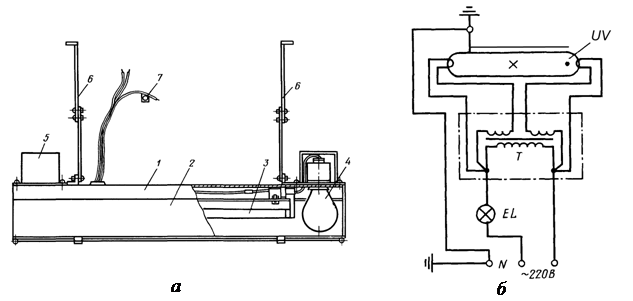 |
Рисунок 2.6.5. Опромінювач ЭО-1-30М: а – будова; б – принципова електрична схема; 1 – кожух; 2 – розсіювач; 3 – лампа ЛЭ-30; 4 – лампа розжарювання; 5 – трансформатор.
Самохідна установка УОК-1 (рисунок 2.6.6 а) з двома лампами типу ДРТ-400 приводиться в дію від електродвигуна і застосовується для опромінення курей в багатоярусних клітках. Необхідна доза опромінення при використанні самохідної установки забезпечується кількістю проходів. Принципова електрична схема установки УОК-1 зображена на рисунку 2.6.6 б. Пересуваючись між клітковими батареями, установка опромінює птицю у клітках відразу з двох боків проходу. Апарати керування роботою електродвигуна і опромінювачів змонтовані на пересувному шасі. Керування роботою електродвигуна здійснюється за допомогою реверсивного електромагнітного пускача КМ1, кнопок SB1, SB2 і SB3 та кінцевих вимикачів SQ1 і SQ2. В передній частині шасі встановлено кінцевий вимикач SQ2, який переключає електродвигун на зворотний хід, а в задній частині - кінцеві вимикачі SQ1 та SQ3 відповідно для вимикання ламп і зупинки шасі в кінці робочого ходу установки. Пуск електродвигуна здійснюють кнопками SB3 (прямий хід) або SB4 (зворотний хід). Лампи запалюють повторно-короткочасним натисканням на кнопку SB1.
|
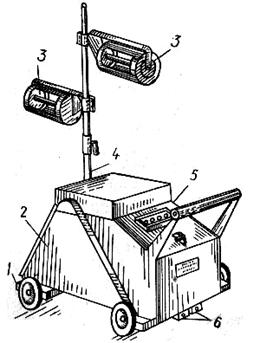
А
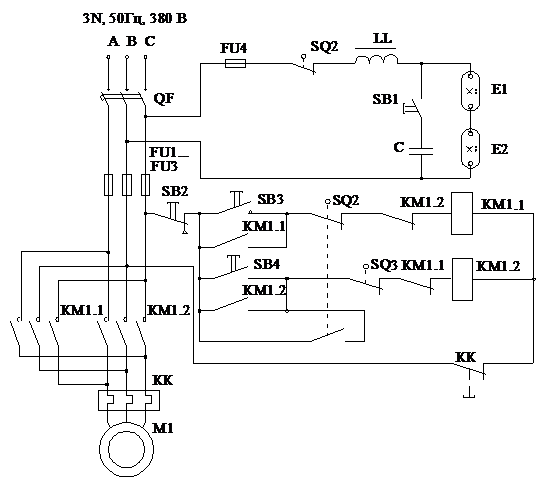
Б
Рисунок 2.6.6. Самохідна установка УОК-1: а – будова; б – принципова електрична схемаю.
Електромеханізована підвісна опромінююча установка УО-4 призначена для ультрафіолетового опромінення тварин і птахів при утриманні їх на підлозі. Схема розміщення опромінюючої установки показана на рисунку 2.6.7, а будова на рисунку 2.6.8. Установка складається з чотирьох опромінювачів, що комплектуються лампами ДРТ-400, щита керування, приводної станції з електродвигуном і редуктором, несучої конструкції. Несучу конструкцію виконують зі стальної оцинкованої проволоки, яку закріплюють вздовж приміщення. Під час роботи опромінювачі роблять зворотно-поступальний рух за допомогою троса, що приводиться в рух від електродвигуна 0,27 кВт. Довжина несучого дроту і троса розрахована на приміщення довжиною до 90м. Швидкість переміщення опромінювачів становить 0,3 м/хв. Необхідна доза опромінення забезпечується кількістю проходів і висотою підвісу опромінювачів.
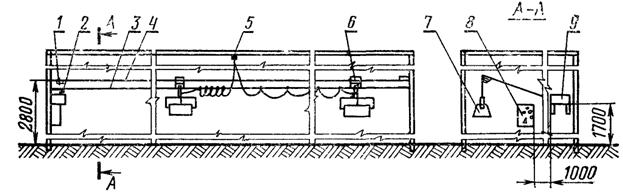
Рисунок 2.6.7. Схема розміщення установки УФ опромінення УО-4: 1 – ролик натяжний; 2 – гак; 3 – несучий провід; 4 – трос сталевий; 5 – розподільник; 6 – поводок з хомутами; 7 – опромінювач; 8 – шафа керування; 9 – привідна станція.
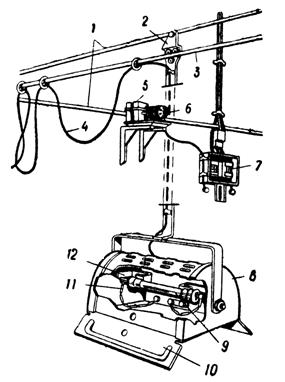
Рисунок 2.6.8. Опромінююча установка УО-4: 1 - троси; 2 - каретка; 3 - несуча проволока; 4 - кабель; 5 - редуктор; 6 - електродвигун; 7 - щит керування; 8 - арматура; 9 - лампа; 10 - екрани; 11 - провідники; 12 - тримач.
На рисунку 2.6.9. показана принципова схема автоматизації установки ультрафіолетового опромінення УО-4М, що дозволяє задавати щодоби необхідне число проходів, опромінювача.
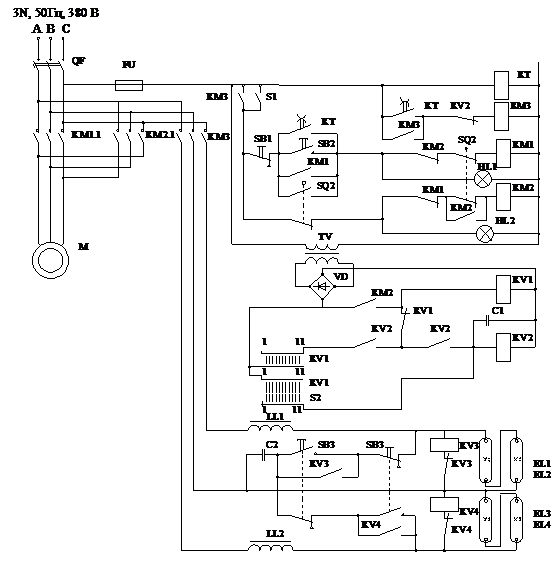
Рисунок 2.6.9. Принципова електрична схема автоматизації установки ультрафіолетового опромінення УО-4М.
В автоматичному режимі роботи (тумблер SA1 розімкнуть) час включення установки задається за допомогою реле часу KT1, а. число проходів опромінювача — багатопозиційним перемикачем SA2.
У визначений час замикається контакт КT1 у ланцюзі котушки магнітного пускача КM1, що подає напругу на лампу і на паралельно приєднане до неї реле максимальної напруги КV3, KV4. У перший момент напруга на лампі висока, і реле напруги КV3, KV4 починає спрацьовувати, періодично підключаючи замикаючим контактом конденсатор C2, що приводить до запалювання лампи. У процесі розігріву лампи напруга на ній падає і реле КV3 , KV4 припиняє спрацьовувати.
Через 15...20. хв замикається контакт реле часу KT1 у ланцюзі котушки магнітного пускача KM2 і електродвигун М надає руху опромінювачіам.
У протилежному кінці приміщення приводний двигун реверсируются кінцевим вимикачем SQ2, що виключає магнітний пускач KM2 і включає KM3. Опромінювачі почнуть рухатися в зворотному напрямку, котушка крокового шукача КV1 одержить живлення, і його щітки пересунуться на одну ламель.
Опромінювачі зроблять стільки повних проходів (туди і назад), на яке число буде встановлений перемикач SA2. Коли щітки шукача стануть на ламель, з'єднану з заданої оператором ламелью перемикача SA2, реле КV2 знеструмить пускач KM1, що відключить двигун і лампи,
Крім того, котушка крокового шукача одержить живлення через контакти реле KV2 і короткозамкнуте коло шукача КV1. У результаті щітки шукача будуть пересуватися доти, поки не потраплять на розімкнуті контакти. Кроковий шукач КV1 повернеться у вихідне положення, і схема виявиться підготовленої до наступного циклу роботи.
ЗАПИТАННЯ
1. Для чого використовують штучне ультрафіолетове опромінення променями області УФ-В? 2. Від чого залежить доза УФ опромінення тварин і птахів. 3. Принципи автоматизації стаціонарних, переносних та пересувних установок УФ опромінення. 4. Для чого призначена самохідна установка УОК-1? 5. Будова та принцип дії установки УОК-1. 6. Будова та принцип дії установки УО-4.
ТЕСТИ
1. Штучне ультрафіолетове опромінення променями області УФ-В використовують для.
A. Для утворення в шкірі з провітаміну активно діючого вітаміну D.
B. Для утворення в шкірі вітаміну А.
C. Для посилення кровообігу в підшкірних тканинах.
2. Для автоматичного керування стаціонарними опромінюючими установками використовують.
A. Апарати керування в функції шляху.
B. Програмні пристрої.
C. Прилади контролю інтенсивності ультрафіолетового опромінення
3. Для автоматичного керування пересувними опромінюючими установками використовують.
A. Апарати керування в функції шляху та програмні пристрої.
B. Програмні пристрої.
C. Регулятори освіленості.
4. Використовуючи принципову електричну схему УОК-1, вкажіть чим подається команда для переключення електродвигуна приводу на зворотний хід?
A. Кінцевим вимикачем SQ3.
B. Кінцевим вимикачем SQ2.
C. Кнопкою SB2.
5. Яке джерело ультрафіолетового опромінення використовують в пересувній установці УО-4?
A. Дугова ртутна лампа ДРТ-400.
B. Дугова ртутна лампа ДРЛ-400.
A. Люмінісцентна ерітемна лампа ЛЭ -15.
2.6.3. Автоматизація установок інфрачервоного опромінення.
При промисловій технології вирощування тварин, для зберігання здоров’я молодняка, значне місце відводиться використанню інфрачервоного опромінення. Інфрачервоне випромінювання – оптичне випромінювання з інтервалом довжини хвиль від 0,002м до 760нм інтервалом частот від 150 ГГц до 400 ТГц. Оскільки інфрачервоні промені погано поглинаються повітрям, то основна їх частина передається безпосередньо тілу, що опромінюється.
Довгохвильове ІЧ випромінювання поглинається верхніми шарами шкіри і викликає їх почервоніння, а короткохвильове проникає в підшкірні шари тканин і органів, де його енергія перетворюється в теплову, в результаті чого посилюються кровообіг, активізуються біологічні процеси і процеси обміну речовин. Все це підвищує біологічні функції організму, сприяє зростанню захисту до простудних захворювань, а в результаті сприяє зберігаємості, кращому росту і розвитку молодняка. ІЧ випромінювання має також позитивний вплив на нервову систему, а через неї і на внутрішні органи.
ІЧ опромінення рекомендується проводити в осінньо-зимовий і ранньовесняний період для курчат, індичат до віку 40…60 днів; качат і гусенят –15…20 днів; поросят-сисунів – 30 …45; телят і ягнят до 10…15 денного віку. В залежності від кліматичних умов тривалість сезону опромінення може бути продовжена чи зменшена. ІЧ опромінення можна використовувати також з лікувальною метою.
Джерелом інфрачервоного випромінювання є будь-яке нагріте тіло. В якості джерел інфрачервоного випромінювання широко використовують інфрачервоні дзеркальні лампи типу ИКЗ, ИКЗК, ИКЗС (світлі випромінювачі), ТЕНи, Керамічні електронагрівники та інші низькотемпературні електронагрівники (темні випромінювачі). Максимум спектрального розподілу енергії "світлих" випромінювачів не співпадає з максимумом спектральної чутливості шкіри тварин. В цьому відношенні перевагу мають "темні" випромінювачі. З енергетичної точки зору вони на 10-25% ефективніші "світлих". "Темні" випромінювачі порівняно з "світлими" мають переваги за надійністю роботи, строком служби, рівномірністю поля під опромінювачем. В їх спектрі відсутнє видиме випромінювання, що непокоїть тварин. Переваги "світлих" випромінювачів - незначні втрати теплоти через теплопровідність і конвекцію.
Вказані джерела використовуються в ІЧ опромінювачах ОРИ-1, ООИ-1, ССПО-250, ИКО, брудерах, установках комбінованого опромінення "ИКУФ", "Луч" та інших.
Аналізуючи дію інфрачервоних випромінювачів слід звернути увагу, що вагому роль визначає температура обігріву. Вона залежить від типу джерела випромінювання, його потужності та напруги живлення, висоти підвісу опромінювача. Використання високотемпературних "світлих" випромінювачів крім того повинно обмежуватися в тривалості, адже тривалий перегрів пагубно впливає на білкові тканини, призводить до "спалювання" кисню. Враховуючи це, автоматизація інфрачервоного опромінення повинна передбачати регулювання температури в зоні дії опромінювачів, а для "світлих" ще й програмне керування тривалістю обігріву.
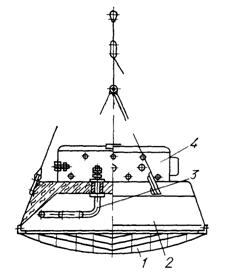
Рисунок 2.6.10. Інфрачервоний опромінювач ОКБ-3296Т: 1 - сітка; 2 - кожух; 3 - нагрівник; 4 - кожух виводів.
Для інфрачервоного опромінення молодняку тварин промисловість випускає опромінювач ОКБ-3296Т (рисунок 2.6.10). Опромінювач має три нагрівальних елементи типу ТЕН потужністю по 400 Вт кожний. Трубчасті нагрівники розміщені в конусоподібному стальному кожусі з подвійними стінками, простір між якими заповнено теплоізоляцією. Знизу нагрівники захищені сіткою. Кожен нагрівний елемент має свій вимикач, розміщений на захисному кожусі 2. Опромінювач забезпечує обігрівання опоросу в одному станко-місці. Зміною висоти підвішування опромінювача та вмиканням різної кількості нагрівних елементів можна регулювати температуру в зоні обігріву.
Для обігрівання 500...600 Курчат віком від 1 до 30 днів при утриманні їх на підлозі використовують брудери БП-1А (рисунок 2.6.11). Брудер являє собою зонт у вигляді шестигранної зрізаної металевої піраміди. Він складається з системи блоків 1, вантажу противаг 2, що призначені для регулювання підйому зонда 6. Під зондом розміщено чотири трубчатих електронагрівачі 4, які забезпечують обігрів. Для освітлення під зондом знаходиться освітлювальна лампа 5. Всередині зонта встановлено чотири нагрівальних електричних елементи потужністю по 250 Вт кожний, терморегулятор і термометр. Дві секції піраміди мають круглі отвори з відкидними кришками для забезпечення обміну повітря під брудером. На кришці встановлена сигнальна лампа.
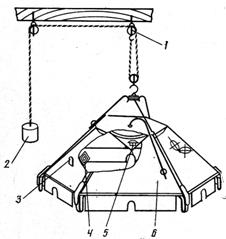 А
А 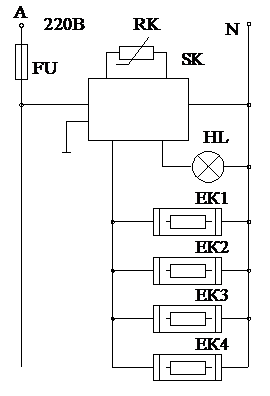 Б
Б
Рисунок 2.6.11. Брудер БП-1А: а - зовнішній вигляд;б – принципова електрична схема; 1- система блоків; 2- вантаж противаги; 4 - ТЕНи; 5 - освітлювальна лампа; 6 - зонд.
Принципова електрична схема брудера зображено на рисунку 2.6.11 б. При вмиканні брудера в електричну мережу напівпровідниковий регулятор температури одержить живлення і ввімкне нагрівальні елементи ЕК1...EK4 в електричну мережу. Нагрівальні елементи складені за схемою рівноплечого моста, в діагональ якого ввімкнена сигнальна лампа. Сигнальна лампа засвічується при перегорянні одного з нагрівальних елементів. Якщо температура під брудером досягає заданої норми, то регулятор вимикає нагрівальні елементи. При зниженні температури повітря під брудером нагрівальні елементи знову вмикаються.
Опромінювач інфрачервоний (рисунок 2.6.12) ССП 05, що використовується для місцевого обігріву молодняка тварин виконаний в вигляді сферичного відбивача, в якому при допомозі патрона Е-27 кріпиться інфрачервона дзеркальна лампа ИКЗК-220-250, захищена металевою сіткою. Кріплення опромінювача до перекриття здійснюється за допомогою підвісного пристрою. Висота підвісу для створення відповідного теплового режиму регулюється в межах 0,7м і вище.
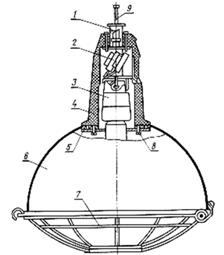
Рисунок 2.6.12 Опромінювач ССП05-250-003-У3: 1– сальник; 2 – зборка затискачів; 3 – патрон; 4- корпус; 5 – ущільнювач; 6 – відбивач; 7 – захисна сітка; фіксатор; 9 – підвісний пристрій.
Для управління процесом інфрачервоного обігріву при використанні опромінювача ССП05-250-003-У3 може Бути використана система керування, яка передбачає програмне керування періодичністю та тривалістю обігріву і регулювання температури в зоні дії опромінювача. Принципова електрична схема керування опромінювачем зображена на рисунку 2.6.13. Підготовка опромінювача до роботи виконується автоматичним вимикачем QF. Добова циклічність ввімкнення і вимкнення опромінювача здійснюється за допомогою програмного реле часу КТ, яке своїм контактом забезпечує ввімкнення та вимкнення магнітного пускача КМ. Контакти КМ забезпечують подачу напруги в кола лампи опромінювача ІR. При ввімкненні вимикача SA програмне реле часу не використовується.
Підтримання температурного режиму на заданому рівні виконується пропорційним регулятором температури з регулюванням напруги живлення на лампі IR. Температура обігріву задається резистором R6. В основі системи підтримання температурного режиму використано регулятор напруги виконаний на базі тиристора VS1. Контроль температури обігріву здійснюється за допомогою терморезистора R7, що установлений в зоні дії опромінювача. Величина струму через тиристори VS1,VS2 залежить від постійних часу заряду та розряду ємності С4, які визначаються співвідношенням опорів R6 та R7. Зі збільшенням температури опір терморезистора зменшується і в результаті чого зростає струм заряду ємності С4 через терморезистор та діод VD6 і напруга на ємності С4 зменшується. Керуюча напруга потрапляє на тиристори через підсилювач струму, утримуючи постійну та змінну складову. Змінна складова формується за допомогою фазообертача R3, C1 І через ємність С2 потрапляє на базу транзистора VT1. Цим забезпечується плавна зміна кута відкривання тиристора а отже і струм через навантаження. Резисторами R1, R4 задається відпровідно режим роботи тиристорів VS1, VS2. Про наявність напруги на блоці управління температурним режимом свідчить сигнальна лампа HL1. Захист кіл опромінювача від коротких замикань здійснюється автоматичним вимикачем QF, а кіл керування запобіжниками FU1 та FU2.

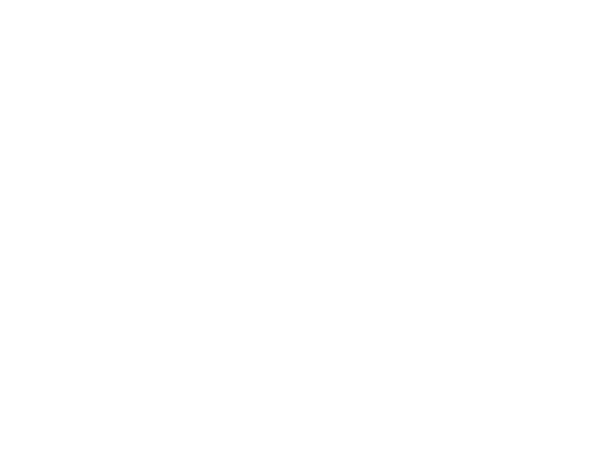
Рисунок 2.6.13. Принципова електрична схема керування опромінювачем ССП05-250-003-У3 .
Особливо добрі результати дає одночасне опромінення тварин і птиці інфрачервоними і ультрафіолетовими променями. Промисловість випускає для одночасного інфрачервоного і ультрафіолетового опромінення установки "ИКУФ", "Луч", "СОЖ". Деякі установки комбінованого опромінення крім того комплектуються аероіонізаторами.

Рисунок 2.6.14. Опромінювач установки ІКУФ-1:
1— інфрачервона лампа; 2— еритемна лампа; 3 — кожух пуско - регулюючого апарата з перемикачами; 4—підвіска; 5—захисна решітка.
До складу однієї установки ІКУФ-1М входить 40 опромінювачів, силовий щиток і блок програмного керування. Кожен опромінювач (рис. 2.6.14) має дві інфрачервоні лампи типу ІКЗК-220-250 і одну ультрафіолетову лампу ЛЕ-15, які змонтовані в загальній арматурі разом з пусковою апаратурою для лампи ЛЕ-15. Один опромінювач забезпечує обігрівання і опромінювання поросят-сисунів у двох станко-місцях, а телят — в одному станко-місці.

Рисунок 2.6.15. Принципіальна електрична схема установки ІКУФ-1М.
Принципіальну електричну схему установки ІКУФ-1М зображено на рис. 2.6.15. В схемі передбачено ручне і автоматичне керування. При ручному керуванні тумблери SA1 і SA2 встановлюють у положення «А». Якщо подати на схему напругу, то спрацює реле часу КТ1 типу 2РВМ і через свої контакти подасть напругу на котушки електромагнітних пускачів КМ1 і КМ2. Пускачі спрацюють і ввімкнуть інфрачервоні та ультрафіолетові лампи. Ультрафіолетові лампи розраховані на напругу 127 В і живляться від спеціальних трансформаторів. Програмне реле регулюють на потрібний режим роботи, і воно автоматично підтримує потрібну тривалість роботи ламп.
Універсальна автоматизована установка «Луч» призначена для інфрачервоного обігрівання і ультрафіолетового опромінення молодняку тварин і птиці. Вона складається з пульта керування і 40 опромінювачів (рисунок 2.6.16).
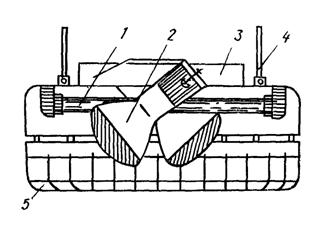
Рисунок 2.2.16. Опромінювач установки "Луч":1 - еритемна лампа; 2 - інфрачервона лампа; 3 - кожух пускорегулюючої апаратури; 4 - підвіска; 5 - захисна решітка.
Опромінювач являє собою жорстку овальну конструкцію, в якій на кронштейні змонтовані дві інфрачервоні лампи 2 і між ними одна еритемна лампа типу ЛЭ-15 або ЛЭО-15. Шарнірне кріплення інфрачервоних ламп дає можливість регулювати їх положення до 90º. Зверху в кожусі 3 розташована пускорегулююча апаратура лампи ЛЭ-15. Знизу опромінювач закритий захисною решіткою 5. Для ступінчастого регулювання напруги на інфрачервоних лампах служать автотрансформатори типу AT-10, забезпечує зміну температурного режиму у процесі вирощування молодняку.
Принципіальна електрична схема установки «Луч» зображена на рис. 2.6.17. Схема забезпечує ручне і автоматичне керування. При ручному керуванні вмикають і вимикають інфрачервоні лампи перемикачем SA1 а необхідну напругу на лампах встановлюють перемикачами Q2 і Q3. При автоматичному керуванні перемикач SA1 встановлюють у положення «А». Після цього перемикачами Q2 і Q3 встановлюють необхідну напругу для інфрачервоних ламп. Тривалість періодів роботи і перерв регулює реле часу типу 2РВМ, яке має дві програми.
Ручне керування лампами ЛЕ-15 здійснюють вимикачем SA2. При автоматичному керуванні лампами ЛЕ-15 перемикач SA2 встановлюють у положення «А», а режим роботи забезпечує друга програма реле часу 2РВМ (контакт KT1: 2) відповідно до заданої добової дози.
Рисунок 2.6.17. Принципова електрична схема установки "Луч".
В сучасних установках інфрачервоного опромінення для регулювання напруги живлення на інфрачервоних лампах, з метою регулювання температурного режиму, використовують тиристорні регулятори напруги.
ЗАПИТАННЯ
1. Що використовують в якості джерел інфрачервоного випромінювання? 2. Як поділяються за спектральним складом джерела інфрачервоного випромінювання та особливості їх використання? 3. Охарактеризуйте будову і принцип дії установок інфрачервоного опромінення 4. Які основні принципи керування установками інфрачервоного обігріву. 5. Які установки використовуються для одночасного інфрачервоного і ультрафіолетового опромінення? 6. Принципи керування установками комбінованого опромінення.
ТЕСТИ
1. Які лампи використовують в інфрачервоних випромінювачах?
A. Лампи типу ИКЗ, ИКЗК, ИКЗС.
B. Лампи типу ЛЭ-15, ЛЭ0-3.
C. Лампи типу ИКЗ, ЛЭ-15, ИКЗК.
2. Для чого використовується інфрачервоне випромінювання?
A. Інфрачервоне випромінювання використовують для освітлення молодняку тварин і птиці.
B. Інфрачервоне випромінювання використовують для обігрівання молодняку тварин і птиці.
C. Інфрачервоне випромінювання використовують для утворення з провітаміну активно діючого вітаміну D.
3. Які переваги "темних" випромінювачів порівняно зі "світлими"?
A. "Темні" випромінювачі мають переваги - незначні втрати теплоти через теплопровідність
B. "Темні"випромінювачі мають переваги за надійністю роботи, строком служби, рівномірністю поля під опромінювачем
C. "Темні" випромінювачі мають переваги за надійністю роботи.
4. До яких випромінювачів відносяться брудери БП-1А?
A. До "світлих"
B. До "червоних"
C. До "темних"
5. Який пристрій здійснює автоматичне керування електробрудером БП-1А?
A. Терморегулятор
B. Програмне реле часу.
C. Датчик температури.
6. Які пристрої використовуються для автоматичного керування опромінювачем ССП05-250-003-У3?
A. Терморегулятор
B. Фотореле.
C. Програмне реле часу та регулятор температури.
7. Які пристрої використовуються для автоматичного керування установкою "ІКУФ-1М"?
A. Терморегулятор
B. Автотрансформатор.
C. Програмне реле часу.
8. Використовуючи принципову електричну схему "Луч"вкажіть за допомогою якого пристрою здійснюється регулювання напруги на інфрачервоних лампах?
A. За допомогою перемикача SА2 та електромагнітного пускача КМ1.
B. За допомогою перемикача SА1 та автотрансформатора ТV1.
За допомогою Програмного реле часу КТ.
2.7. АВТОМАТИЗАЦІЯ ЗБИРАННЯ ЯЄЦЬ ТА ЗАБІЙ ПТИЦІ
2.7.1. Автоматизація збирання яєць
Механізація та автоматизація збору яєць характерна для кліткового утримання курей. У кліткових батареях для збирання яєць застосовують стрічкові конвеєри, а також пересувні лотки. Яйце із гнізда або клітки скочується по похилій поверхні підніжної решітки в бік конвеєра або пересувного лотка. Скочується яйце відразу ж після того, як його знесла птиця, на стрічковий конвеєр. Збирають всі яйця на пересувні лотки під час руху кормороздавача.

Рисунку 2.7.1. Кінематична схема механізму яйцезбирання на механізованій клітковій батареї для утримання курок-несучок: 1 — ланцюгові передачі; 2 — редуктор; 3 — електродвигун; 4 — приймально-нагромаджу-вальний стіл; 5 — елеватор: 6 — приводний і натяжний барабани конвеєра; 7 — конвеєр.
Курок-несучок на великих птахівничих підприємствах утримують в багатоярусних, розміщених у кілька рядів кліткових батареях. Щоб забезпечити вихід яєць з усіх ярусів і рядів на загальний приймально - нагромаджувальний стіл, використовують яйцезбиральні конвеєри з елеватором.
На рисунку 2.7.1 зображено кінематичну схему яйцезбирального механізму, який складається з трьох яйцезбиральних конвеєрів 7 в кінці яких розміщений елеватор 5. Із кліток яйця викочуються на стрічкові конвеєри, які транспортують їх у службове приміщення де вони скочуються на полиці-валки елеватора. З полиць елеватора яйця забирають на приймально - нагромаджувальний стіл спеціальними гребінками.
У кліткових батареях типу ОБН-1 один елеватор збирає і подає яйця на приймально нагромаджувальний стіл із кількох рядів батарей. Із кліток яйця поздовжніми конвеєрами подаються на поперечний конвеєр, з якого відсікач спрямовує їх на полиці елеватора. Переміщуючись елеватором вгору, а потім униз, яйця знімаються з нього переднім барабаном і скочуються на приймально - нагромаджувальний стіл.
Основну частину свого робочого часу пташниці затрачають на укладання яєць. Автоматизація укладання дає змогу у 2,5—3 рази збільшити продуктивність праці у пташнику.
Автоматичний укладач яєць складається з орієнтатора, укладального механізму, вічкового конвеєра, магазина порожньої тари, стопуючого пристрою, нагромаджувача і конвеєра заповнених прокладок. Працює укладальник так. Яйцезбиральний конвеєр подає яйця на роликовий орієнтатор, який переміщує і перевертає яйця гострим кінцем в один бік.
Орієнтовані яйця надходять на вічковий конвеєр. Після заповнення п'яти його вічок висовується заслінка механізму укладання яєць, і вони опускаються у тару гострим кінцем униз. Після цього тара зміщується на один рядок. Заповнена прокладка подається до стопуючого пристрою, у якому набирається від двох до десяти прокладок. Зібрана стопа автоматично передається на конвеєр. У процесі нагромадження стопи (комплекту) прокладки через одну згідно зі схемою їх укладання автоматично перевертаються на 90°.
Принципова електрична схема керування збором яєць у пташнику (рис. 2.7.2.) передбачає роботу в ручному, налагоджувальному й автоматичному режимах. Вибір режиму здійснюється багатопозиційним перемикачем SA1. Тумблерними перемикачами SA2...SA7 здійснюється дистанційне вмикання окремих установок у налагоджувальному режимі, a SA8 — при ручному керуванні. При вмиканні поперечного транспортера М3 магнітним пускачем КМ3 блок - контактами KV1:1 і KV1:2 через KV9.1 та KV9.2 підготовляється вмикання подовжніх транспортерів першого ярусу M1 і привода щіток очищення стрічок М2. На другому ярусі поперечний транспортер М4 через реле KV7 зблокований з електроприводом подовжнього транспортера М6, а через реле KV10 — з електроприводом очищення щіток М5.
В автоматичному режимі керування по заздалегідь розрахованому алгоритмі здійснює багатоканальний пристрій програмного керування (наприклад, КЭП-12У), що своїми контактами дублює функції контактів вимикачів SA2...SA7 і автоматично керує транспортерами.

РИсунОк 2.7.2 . Принципіальна електрична схема керування збиранням яєць в пташнику.
При централізованому зборі яєць, щоб не втратити контроль над продуктивністю птахів, вводять автоматичний облік яєць, для чого використовують лічильники різних конструкцій (наприклад, СИСЭИСЭ-5), датчики імпульсів для який можуть служити фотореле або з мікроперемикачами (герконами) релейні елементи.
ЗАПИТАННЯ
1. Як здійснюється збирання яєць в кліткових батареях? 2. Який пристрій здійснює автоматичне керування лінією збирання яєць? 3. Вкажіть правильну послідовність вмикання лінії збирання яєць 4. Які пристрої використовують для збирання яєць?
ТЕСТИ
1. Які пристрої використовують для збирання яєць
A. Застосовують стрічкові конвеєри
B. Застосовують пересувні лотки
C. Застосовують стрічкові конвеєри, а також пересувні лотки.
2. Використовуючи принципову електричну схему вкажіть в яких режимах працює лінії збору яєць у пташнику?
A. Передбачається робота в ручному, налагоджувальному й автоматичному режимах які встановлюються багатопозиційним перемикачем SA1
B. Передбачається робота в ручному, автоматичному режимах які встановлюються багатопозиційним перемикачем SA1
C. Передбачається робота в налагоджувальному й автоматичному режимах які встановлюються багатопозиційним перемикачем SA1
3. Використовуючи принципову електричну схему лінії збору яєць у пташнику вкажіть для чого використовуються тумблер SA8?
A. Здійснюється автоматичне вмикання окремих установок у налагоджувальному режимі
B. Здійснюється дистанційне вмикання окремих установок у налагоджувальному режимі
C. Здійснюється ручне вмикання лінії
4. Використовуючи принципову електричну схему лінії збору яєць у пташнику вкажіть в якій послідовності вмикаються двигуни М1, М2, М3 першого ярусу?
A. При вмиканні поперечного транспортера М1 магнітним пускачем КМ1 блок - контактами KV1:1 і KV1:2 через KV9.1 та KV9.2 вмикаються подовжній транспортері першого ярусу M3 і привід щіток очищення стрічок М2.
B. При вмиканні поперечного транспортера М3 магнітним пускачем КМ3 блок - контактами KV1:1 і KV1:2 через KV9.1 та KV9.2 вмикаються подовжній транспортері першого ярусу M1 і привід щіток очищення стрічок М2.
C. При вмиканні поперечного транспортера М2 магнітним пускачем КМ2 блок - контактами KV1:1 і KV1:2 через KV9.1 та KV9.2 вмикаються подовжній транспортері першого ярусу M1 і привід щіток очищення стрічок М2.
5. Використовуючи принципову електричну схему лінії збору яєць у пташнику вкажіть для чого використовуються тумблерні перемикачі SA2...SA7?
A. Здійснюється дистанційне вмикання окремих установок у налагоджувальному режимі
B. Здійснюється ручне вмикання окремих установок у налагоджувальному режимі
C. Здійснюється автоматичне вмикання окремих установок у налагоджувальному режимі
2.7.2. Автоматизація процесу забою птиці
Для забою птахів й обробки тушок до товарних кондицій сучасні спеціалізовані птахівничі господарства мають забійні цехи, обладнані напівавтоматичними забійними лініями (рисунок 2.7.3). Птахів, доставлених із пташників у клітках, підвішують за ноги закрепами на ланцюзі підвісного конвеєра, що рухається повільно зі швидкістю 0,08 м/с убік робочого місця забою і знекровлювання.
Перед забоєм апаратом для електроглушіння, на який подається слабкострумова напруга від 650 до 900 В, птахів приводять у спокійний стан. За допомогою спеціальних ножиців птахів умертвляють. Над жолобом для стоку крові кожен птах рухається протягом 2 хв., а потім надходить у камеру теплової обробки, де протягом наступних 2 хв. її обробляють паром при температурі 52...54°С (для курчат 51...53°С). Потім тушка проходить по черзі ряд машин, де знімається махове перо з крил і хвоста, оперення з голови і шиї. Далі тушки миють теплою водою протягом 30 с і піддають воскуванню, підсушують і попередньо прохолоджують. Потім віск із тушок видаляють, обробляють лапки, тушки знімають з конвеєра, упаковують у тару і відправляють у камеру охолодження.
Запускають забійну лінію з центрального пульта керування. Послідовність включення в роботу окремих машин здійснюється багатоканальним програмним пристроєм.
Забійна лінія В2-ФЦЛ-3 використовується для переробки бройлерів, курей та курчат.
Цех призначений для обслуговування бройлерних птахофабрик потужністю 1 млн. голів на рік, а також великих птахофабрик яєчного напрямку, племптахозаводів.
Продуктивність цеху—3000 гол/год з випуском м'яса птиці в і готовому вигляді, супових наборів із ніжок та голів, кісткового борошна та пір'я.
Для збереження птиці у забійному цеху передбачені чотири універсальні холодильні камери на 240 т. До забійного цеху входять такі технологічні лінії (ділянки):
Ділянка транспортування птиці до місця її підвішування на конвеєрі;
Лінія забою птиці та первинної обробки тушок;.
Лінія обробки тушок;
Лінія охолодження тушок та харчових субпродуктів;
Лінія запаковування внутрішніх органів у поліетиленову плівку;
Ділянка сортування, фасування та запаковування тушок у пакети з поліетиленової плівки;
Ділянка переробки відходів тваринницького походження на кормове борошно.
Пристрій для санітарної обробки К7-ФО-2-Л6 призначений для очищення та дезінфекції всіх рухомих елементів конвеєра. Його встановлюють перед ділянкою підвішування живої птиці. Цей механізм, який складається з двох щіток, що обертаються, розташовані на відкритих стінках.
 Рисунок 2.7.3. Технологічна схема напівавтоматичної лінії забою птиці:
Рисунок 2.7.3. Технологічна схема напівавтоматичної лінії забою птиці:
1 - загін для птахів; 2 - підвісний конвеєр; 3 - жолоба для забою і знекровлювання; 4 - камера для теплової обробки тушок; 5,6,7, 8 - машини для видалення пір’я; 9 - автоматична машина для видалення пуху з тушки; 10 - стіл для збору залишків пера при ручній обробці тушок; 11 - стіл для обробки тушок; 12 - ванна для автоматичного воскування тушок; 13 - охолоджувач для воскованих тушок; 14 - візок для збору і транспортування воскової маси; 15 - автоматична машина для зняття воскового покрову з тушок; 16 - стіл для збору залишків воскової маси при ручній обробці тушок; 17 - машина для миття лапок; 18 - машина для упакування тушок; 19 - візок для транспортування тушок; 20 - бак розплавленої воскової маси; 21 - бак для регенерації воскової маси: 22 - центрифуга для відділення воскової маси.
Апарат електроглушіння РЗ-ФЗО призначений для анестизування живої птиці електричним струмом під час її руху на конвеєрі. У вигляді контактного електроду в ньому використовують воду, яка знаходиться в ізольованому об'ємі. Апарат складається із стояка, ванни, контактної напрямної лебідки для регулювання висоти встановлення ванни та електричного блока.
Птиця, занурюючись з головою у воду, до якої підведений електричний контакт, замкне електричне коло вода—напрямна (другий електрод), під дією струму впадає в шоковий стан, що полегшує подальший забій. Наявність води забезпечує надійний контакт та дозволяє значно знизити робочу напругу струму, потрібну для глушіння птиці. Пропускна здатність апарату для бройлерів, курей та курчат до 6000 гол/год, а для каченят та качок 2000 гол/год. Діючу напругу електричного струму можна змінювати в межах 15—220 В, габаритні розміри установки 1350х950х2200 мм, маса 150 кг. Час глушіння 6с. Напруга робочого середовища для бройлерів (курей, цесарок) 90—110 В, а для каченят (гусенят, індичат) — 120—135 В.
Машина для зовнішнього забою В2-ФЦЛ-6/4 складається із каркасу, регульованого за висотою стояка, привода, дискового ножа, двох напрямних та двох підпружинених важелів.
Лічильник птиці В2-ФЦЛ-6/66 складається із системи важелів та напрямних, змонтованих на металевій рамці, та ящика, який виноситься за межі забійного цеху.
На рамі кріпиться клемна коробка та двох направляючих, до однієї з яких кріплять датчики з вимикачем, важелем та противагою.
Машина для зняття пір'я К7-ФЦЛ/7 складається з двох панелей, двох опорних рам, зрошувальної системи та системи важелів. Кожна панель представляє собою каркас, зварений з листів та стяжок. На одному з листів кожного каркасу, який також є передньою стінкою, змонтовані три ряди ротодисків (по сім вузлів у кожному ряду). Всі ротодиски обладнанні рифленими гумовими робочими органами (формовими виробами) — пальцям. Верхній та нижній ряд ротодисків зроблені з нахилом.
ЗАПИТАННЯ
1. Як здійснюється процес забою птиці? 2. Які основні лінії та ділянки входять до забійного цеху птиці? 3. Які технологічні операції виконуються в лінії забою птиці?
ТЕСТИ
1. За допомогою якого пристрою здійснюється послідовність вмикання окремих машин лінії забою птиці
A. Послідовність включення в роботу окремих машин здійснюється вручну
B. Послідовність включення в роботу окремих машин здійснюється багатоканальним програмним пристроєм
C. Послідовність включення в роботу окремих машин здійснюється за допомогою реле часу.
2. За допомогою чого здійснюється вмикання окремих машин лінії забою птиці?
A. Здійснюється програмним реле часу
B. Здійснюється багатоканальним програмним пристроєм.
C. Здійснюється за допомогою реле часу
3. Для чого призначений апарат електроглушіння РЗ-ФЗО лінії забою птиці?
A. Для анестизування живої птиці електричним струмом під час її руху на конвеєрі у якому використовують воду в вигляді контактного електроду.
B. Для омертвляння живої птиці електричним струмом під час її руху на конвеєрі
C. Для забою живої птиці електричним струмом під час її руху на конвеєрі у якому використовують воду в вигляді контактного електроду.
4. Як здійснюється зняття пір'я машиною К7-ФЦЛ/7 лінії забою птиці?
A. За допомогою витяжних вентиляторів які розміщеними в два ряди
B. За допомогою працівників лінії які розміщеними в два ряди
С. За допомогою ротодисків які обладнанні рифленими гумовими робочими органами (формовими виробами) — пальцям і розміщеними в два ряди
РОЗДІЛ 3. АВТОМАТИЗАЦІЯ КОРМОВИРОБНИЦТВА
3.1. АВТОМАТИЗАЦІЯ АГРЕГАТІВ ДЛЯ ПРИГОТУВАННЯ ТРАВ’ЯНОГО БОРОШНА
Раціональна годівля тварин та птахів - найважливіша умова збільшення виробництва молока, м'яса та яєць. Збалансовані раціони зменшують витрати кормів, позитивно впливають на племені властивості тварин, здоров'я та довголіття, підвищують якість та знижують собівартість продукції.
В якості основних компонентів кормів використовують подрібнене зерно, зелені, грубі корми, коренеплоди. Для подрібнення зерна використовують в основному молоткові дробарки КДМ-2, ДБ-5, ДКМ-5. Грубі корми подрібнюють на подрібнювачах ИГК-30Б, КДУ-2, "Волгарь-5", ИРТ-Ф-80. Коренебульбоплоди – на подрібнювачах ИСК-3 , ИКМ-Ф-10. Крім вказаного обладнання приготування кормів, використовують агегати приготування тра’вяного борошна, обладнання пресування кормів, плющилки зерна, екструдери та агрегати приготування кормосумішей.
Приготування трав'яного борошна методом високотемпературного сушіння - ефективний спосіб концервуваня зелених кормів. При цьому забезпечується збереження до 95 % поживних речовин, що містяться в рослині, засвоювання організмом тварин даних речовин досягає 70 %. Приготування трав’яного борошна відбувається в основному на пневмобарабанних сушарках безперервної дії. Основними операціями приготування трав’яного борошна є сушіння попередньо подрібнених частинок трави та їх подрібнення на дробарці.
Для приготування трав’ного борошна або січки використовують агрегати АВМ продуктивністю 0,65 Та 1,5 т/год. Агрегати можуть працювати на рідкому, твердому паливі та природному газу.
У модифікації АВМ-0,65РГ агрегат працює на природному газі. Він складається з живильника зеленої маси, транспортера, теплогенератора, сушильного барабана, дробарки, системи відведення борошна, системи рециркуляції відпрацьованого теплоносія, електроприводів.
Скошена і подрібнена кормозбиральним комбайном або косаркою-подрібнювачем трава доставляється до сушильного агрегату. Живильник зеленої маси (рисунок 3.1) типу ПЗМ-1,5, який включає в себе лоток 7; конвеєр 8; бітери 9,10; гвинтовий транспортер 11, призначений для приймання сировини і дозованої її подачі на транспортер 12 агрегату. Транспортер дозує і подає сировину в сушильний барабан 13.
Теплогенератор, який включає в себе вентилятор 1; пальник 2; камеру газифікації 3; топку 4, виробляє теплоносій при спалюванні природного газу і направляє його в сушильний барабан. Температура теплоносія в різних режимах роботи коливається від 500 до 900 °С.
Рисунок 3.1. Технологічна схема АВМ–0,65: 1- вентилятор; 2- пальник; 3- камера газифікації; 4- топка; 5- бітер; 6- гідроциліндр; 7- лоток; 8- конвеєр; 9,10- бітер; 11- транспортер гвинтовий; 12- транспортер; 13- барабан; 14-система рециркуляції; 15, 16, 17- заслінка; 18- циклон; 19-вентилятор; 20-шнек; 21-дозатор; 22- вентилятор; 23 – система охолодження борошна – циклон; 24-вентилятор; 25- циклон; 26- дозатор; 27- повітропровід; 28- решето; 29- дробарка; 30- заслінка; 31 забірник зерна; 32, 33- заслінка; 34- шлюзовий затвор; 35- відбірник.
Сушильний барабан 13 складається з трьох концентричних циліндрів, встановлених таким чином, що висушувана сировина при русі проходить послідовно кожний з них.
Система відведення сухої маси складається з циклона 18 і вентилятора 19. Вентилятор працює на відсмоктування і створює повітряний потік, що необхідний для транспортування маси разом з теплоносієм і видалення відпрацьованого теплоносія. Циклон зв'язаний з сушильним барабаном трубопроводом, обладнаним відбірником важких сторонніх предметів 35. У нижній частині циклона розміщений шлюзовий затвор 34, який подає суху масу в молоткову дробарку 29. Система відведення борошна складається з циклона відведення борошна 25, охолоджувального циклона 23 з вентиляторами 22, 24 і дозаторами 21, 26. Під дозаторами циклонів розміщений шнек 20 з чотирма вивантажувальними горловинами.
Система рециркуляції теплоносія забезпечує повернення частини відпрацьованого теплоносія в теплогенератор. Рециркуляція дозволяє зекономити до 7-12% палива при номінальному режимі роботи агрегату.
При сушінні монокормів із брикетуванням січки і зерна без подрібнення потік сухого продукту спрямовується в малі циклони в обхід дробарки. При приготуванні трав’яної січки суха маса може спрямовуватися в обхід системи відведення і охолодження борошна.
Більш пізні моделі агрегату АВМ-1,5Б оснащені системами автоматичного регулювання процесом сушіння і рециркуляції теплоносія.
Для правильного ведення технологічного процесу приготування трав'яного борошна на агрегаті застосовані наступні види автоматичного і ручного регулюванні:
Автоматична підтримка заданої температури на виході із сушильного барабана, здійснюване виконавчим механізмом (рис. 3.2.) по командах регулюючого приладу. Сигнал про величину контрольованої температури надходить від термопари, встановленої в потоці теплоносія за барабаном;
Безступінчасте регулювання швидкості обертання сушильного барабана в межах від 2,8 до 7,8 об/хв встановлюється вручну за допомогою варіатора. При цьому вибирається раціональний режим сушіння різного виду сировини;
Автоматичне керування запуском теплогенератора і контроль полум'я в топці теплогенератора.
Автоматичне регулювання кількості зеленої маси на транспортері створюється щоб уникнути нагромадження маси в нижній частині транспортера, що приведе до забивання шнека конвеєра. Товщину зеленої маси регулюють бітером, переміщаючи його за допомогою рукоятки домкрата.
У випадку нагромадження маси в нижній частині транспортера відбувається торкання датчика верхнього рівня об масу й автоматичний регулятор відключає електродвигун приводу конвеєра. Після зниження рівня маси до встановленого конвеєр знову запускається.
Система автоматичного регулювання процесом сушіння забезпечує стабілізацію вологості сухого корму. Вхідними параметрами системи є температура теплоносія і вологості трав'яної січки. Керування здійснюється шляхом зміни подачі палива і вхідної сировини.
Система регулювання (рис. 3.2) містить у собі термопару 13, встановлену на виході сушильного барабана 12, регулятор подачі палива 6 з виконавчим механізмом 4.1 і пусковим пристроєм 3.1, регульовані приводи стрічок транспортера 2 і конвеєри 1 з електродвигунами постійного струму 19 і тиристорними станціями керування 18, потоковий вологомір 15, блок узгодження 17, блок вибірковості 16, що регулює електронний прилад 9.1, коригувальні електронні прилади 8.1 і 8.2.
Алгебраїчна сума сигналу вологості висушеного корму, вимірюваної потоковим вологоміром 15 типу ВП-1, і сигналу швидкості зміни температури теплоносія на виході сушильного барабана, формованого в коригувальному приладі 8.2 типу К16.1 по сигналу термопари 13, порівнюється із сигналом заданої вологості в регулюючому приладі 9.1 типу Р25.1. По отриманій різниці вхідних сигналів формується керуючий вплив на виконавчий механізм 4.1 регулятора подачі палива 6 і електропривода транспортера 2 і конвеєри 1, які змінюють подачу сирого матеріалу в сушильний барабан. Якщо температура теплоносія на вході в сушильний барабан перевищує значення, установлене на мілівольтметрі, вплив на зміну подачі палива припиняється.
Система автоматичного керування рециркуляцією забезпечує зміну кількості рециркулюємого теплоносія в залежності від розрідження в топці. Вона складається з датчика тяги 7, що регулюється приладом 9.2, пускового пристрою 3.2 і виконавчого механізму 4.2. При відхиленні розрідження в теплогенераторі від заданого значення регулюючий прилад через пусковий пристрій пускає в хід виконавчий механізм, що повертає заслінку у вихлопній трубі агрегату.
Система автоматичного регулювання вмикається в роботу через 40—80 хв. після запуску агрегату, тобто в сталому режимі його роботи. До виходу на цей режим регулюючий прилад 9.1 вимірює різницю між температурою теплоносія за сушильним барабаном і його заданим значенням та формує керуючий сигнал для корекції подачі палива і сирого матеріалу.
Рисунок 3.2. Структурна схема системи автоматичного регулювання процесу сушіння агрегату АВМ-1,5Б:
1 — конвеєр; 2 — транспортер; 3 — пусковий пристрій; 4 — виконавчий механізм; 5 — теплогенератор; 6 — регулятор подачі палива: 7—датчик тяги; 8 — коригувальний електронний прилад; 9 — регулюючий електронний прилад; 10—заслінка; 11—система рециркуляції теплоносія; 12—сушильний барабан; 13—термопара; 14—система відводу сухої маси; 15—потоковий вологомір; 16—блок вибірковості; 17—блок узгодження; 18—тиристорна станція керування; 19 - електродвигун постійного струму
В агрегаті для сушіння кормів АВМ-1,5Б (ТУ 105-1-1102-86) для рівномірної подачі зеленої маси у барабан привід живильника-дозатора стебельчатих кормів здійснюється від електродвигуна постійного струму.
ЗАПИТАННЯ
1. Яка необхідність використання Високотемпературного сушіння зелених кормів? 2. Для чого призначений АВМ? 3. З яких основних частин складається АВМ? 4. За допомогою технологічної схеми поясніть процес роботи АВМ. 5. Які система автоматичного регулювання процесом містить АВМ? 6. Використовуючи структурну схему АВМ вкажіть як буде проходити сигнал при збільшені вологості висушеного корму 7. Використовуючи структурну схему АВМ вкажіть як буде проходити сигнал при збільшені вологості висушеного корму. 8. Використовуючи структурну схему АВМ вкажіть як буде проходити сигнал при Відхиленні розрідження в теплогенераторі від заданого значення 9. За допомогою принципової електричної схеми АВМ поясніть процес роботи агрегату.
ТЕСТИ
1. . Як здійснюється автоматичне регулювання процесом сушіння в АВМ?
A. Від рівня і зміни температури змінюють подачу сировини
B. Від зміни температури змінюють подачу палива.
C. Від вологості і зміни температури змінюють подачу сировини та палива
2. Як здійснюється Автоматичне керування рециркуляцією в АВМ?
A. При відхиленні розрідження в топці від заданого значення виконавчий механізм повертає заслінку у вихлопній трубі агрегату.
B. При відхиленні розрідження в топці від заданого значення виконавчий механізм закриває подачу палива.
C. При відхиленні розрідження в топці від заданого значення виконавчий механізм повертає повітря у агрегаті.
3. В якій послідовності вмикаються електродвигуни в АВМ?
A. Пуск електродвигунів в будь якій послідовності.
B. Пуск електродвигунів можливий тільки в послідовності, зворотної напрямку проходження сировини.
C. Пуск електродвигунів можливий тільки в напрямку проходження сировини.
3.2. АВТОМАТИЗАЦІЯ ПРОЦЕСУ ГРАНУЛЮВАННЯ ТА БРИКЕТУВАННЯ КОРМІВ
3.2.1. Автоматизація гранулювання кормів.
Більш повно зберігаються живильні речовини в зелених кормах штучного сушіння в пресованому виді. У порівнянні з трав'яним борошном втрати каротину в гранулах знижуються в 10 разів. Застосування гранульованих і брикетованих кормів у раціонах тварин дозволяє збільшити середньодобовий надій молока на 7%, прирости ваги молодняку великого рогатих на 10-20%, свиней на 10-15%, яйценосність на 11%. Крім того, використання кормів у пресованому виді дозволяє скоротити трудові затрати і механічні втрати при завантажувально - розвантажувальних і транспортних роботах, більш економічно використовувати складські приміщення, тару і транспортні засоби, зменшити втрати кормів при збереженні, транспортуванні і роздачі. Гранулюванню піддають вітамінне борошно, брикетуванню - висушена трав'яна січка.
Гранули - це сипкі кормові компоненти (найчастіше - трав'яне борошно), спресовані до щільності 800 - 1300 кг/м3, діаметром (товщиною) до 25 мм. Брикети - це спресовані до щільності 500 - 900 кг/м3 кормові суміші із включенням грубих кормів, трав'яної або солом'яної січки.
Головною машиною в комплекті обладнання для гранулювання і брикетування є брикетний прес або гранулятор. За принципом дії вони бувають вальцьові, шнекові, плунжерні та матричні. Найрозповсюдженішими є матричні робочі органи, які складаються з матриці з пресувальними каналами і пресувальних вальців. Процес ущільнення в такому робочому органі відбувається так (рисунок 3.3). У робочу зону, створену внутрішньою поверхнею матриці 2 і зовнішньою поверхнею вальця 5, подається матеріал 1, який спочатку стискується, а потім вдавлюється в канали 4. При їх заповненні опір пресування матеріалу зростає, у зв'язку з чим тиск пресування збільшується і досягає максимального значення при повністю заповнених каналах. Коли тиск пресування дорівнюватиме силі тертя спресованого матеріалу об стінки каналів, він виштовхується. При зустрічі з ножем 3 пресований матеріал розділяється на окремі гранули або брикети.

Рисунок 3.3. Технологічна схема матричного преса: 1 – корм; 2 – матриця; 3 – ніж; 4 – канал; 5 – валець.
Для пресування кормів використовують гранулятори ОГМ та обладнання ОПК, технологія приготування пресованих кормівкормів у них схожа. Обладнання для гранулювання трав'яного борошна ОГМ-0,8А призначене для приготування гранул з трав'яного борошна, що виробляється агрегатом для сушіння кормів АВМ-0,65. Комплект обладнання складається з дозатора, змішувача, гранулятора, охолоджувача з сортувалкою, вентилятора сортувалки, системи введення води, електропривода (рисунок 3.4).
Дозатор 1 призначений для рівномірної дозованої подачі борошна у змішувач гранулятора. Він має швидкохідний шнек, змонтований у похилому корпусі. Корпус складається з приймальної і вивантажувальної горловини, транспортного і зворотного каналів. На верхній площадці приймальної горловини встановлений шлюзовий затвор. Всередині приймальної горловини обертається руйнувач склепіння, який запобігає створенню склепіння з борошна. Подача борошна у змішувач регулюється дозуючою заслінкою, яка перекриває вивантажувальну горловину. У змішувачі 2 борошно змочується водою до вологості, необхідної для гранулювання, перемішується і переміщується вздовж осі до живильника гранулятора. Робочий орган змішувача - мішалка, розміщена в корпусі і обертається у двох підшипниках. На корпусі змішувача змонтовано обладнання для подачі води.
Гранулятор 3 виробляє гранули, продавлюючи зволожене борошно пресуючими вальцями через радіальні отвори кільцевої матриці. На виході з отворів матриці гранули наштовхуються на нерухомий ніж і обламуються.
Рисунок 3.4. Технологічна схема гранулятора трав'яного борошна ОГМ-0,8А: 1- дозатор; 2 - змішувач; 3 - прес; 4- живильник; 5 - вентилятор сортувалки; 6 - циклон; 7- вентилятор охолодження; 8 - охолоджувач; 9 - пневмоконвеєр; 10 - шнек сортувалки; 11 - сортувальна колонка; 12- вентилятор пневмотранспортера; 13- бункер. Керування і захист електроприводів здійснюються за допомогою шафи керування, в якій встановлено електромагнітні пускачі, автоматичні вимикачі, реле тощо.
Охолоджувач 8 жалюзійно-циклонного типу складається з вентилятора і циклона з жалюзями на бічній поверхні. Циклон має внутрішній і зовнішній циліндри, які утворюють камеру охолодження. На зовнішньому жалюзійному циліндрі встановлений датчик верхнього рівня гранул у циклоні. Вентилятор 7 в охолоджувачі створює два паралельних повітряних потоки, один з яких транспортує гранули з преса в охолоджувач, а другий охолоджує їх. Одночасно з охолоджуваної маси виноситься незгранульоване борошно, яке під дією вентилятора 5 через циклони 6 поступає в приймальну горловину дозатора.
У процесі охолодження з гранул випаровується волога і в них відбуваються певні фізико-хімічні зміни, внаслідок чого гранули набувають необхідної міцності.
Після заповнення охолоджувальної колонки за командою датчика верхнього рівня вмикається електропривод шнека сортування і гранули переміщуються у сортувальну колонку.
При сортуванні дрібняк і незгранульоване борошно відокремлюються від гранул. Сортувалка виконана у вигляді циліндра з горловиною і консольним шнеком 11. До кінця циліндра приєднана сортувальна колонка 11. Охолоджені гранули шнеком подаються в сортувальну колонку, де у потоці повітря, створюваним вентилятором 5, дрібняк і незгранульоване борошно відокремлюються від кондиційних гранул і через циклон 6 направляються на повторне гранулювання. Пневмотранспортером 9 гранули спрямовуються в циклон 6, і подалі в бункер 13. Система введення води складається з насоса з електроприводом, який подає воду у спеціальний резервуар. Звідки вода самотьоком у змішувач подається через електромагнітний вентиль. При наявності водогону воду підводять безпосередньо до електромагнітного вентиля.
Принципіальна електрична схема керування ОГМ-0,8А (рис.. 3.5) забезпечує режими «Робота» і «Налагодження».
В режимі «Робота» перемикачі SA1, ... , SA3 ставлять у положення 1 і натисканням на кнопку SВ2 подають напругу на котушку реле керування КY, яке спрацьовує і своїм замикаючим контактом підготовляє до роботи кола керування електроприводами. Одночасно вмикається електродзвінок, який попереджає про пуск агрегату.
Пуск електродвигунів здійснюється, натисканням на кнопки «Пуск» SB4, SB6, SB8, SB10, SB12 і SB14 у послідовності, протилежній напрямку руху продукту. При натисканні на ці кнопки подається живлення на котушки відповідних електромагнітних пускачів КМ1, ..., КМ6, які вмикають в електричну мережу двигуни приводів шлюзового затвора дозатора, вентилятора сортувалки, вентилятора охолодника, преса, змішувача і шнека дозатора. Помилкове вмикання двигунів у будь-якій іншій послідовності не допускається завдяки відповідним блокіровкам. Наприклад, пускач КМ2 можна ввімкнути тільки після вмикання пускача КМ1, коли замкнеться його допоміжний замикаючий контакт в колі котушки пускача КМ2, пускач КМЗ — після вмикання пускача КМ2 і т. д. Уколах керування електродвигунами преса і змішувача передбачені додаткові блокіровки, що здійснюються кінцевими вимикачами SQ1, SQ2 І SQ3. Вимикач SQ1 вимикає двигун преса при потраплянні до камери пресування металевих предметів. У цьому випадку зрізуються запобіжні штифти, розмикається розмикаючий контакт вимикача SQ1 і двигун преса вимикається з електромережі. Кінцевий вимикач SQ2 не допускає вмикання двигуна преса, коли його кожух не закритий. При розкритому кожусі контакт вимикача SQ2 розімкнений і пуск двигуна преса неможливий. Кінцевий вимикач SQ3 вимикає двигун змішувача при забиванні його борошном.
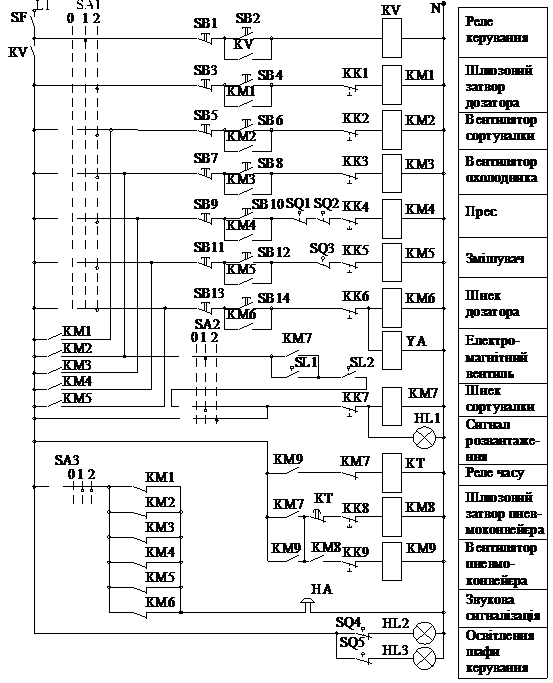
Рисунок. 3.5. Принципіальна електрична схема керування ОГМ-0,8А.
Під час пуску двигуна шнека дозатора кнопку SВ14 треба удержувати в замкненому стані не менш як 10 с. Якщо відпустити її раніше, то у випадку спрацювання реле максимального струму КА під дією пускового струму пускач КМ6 не ввімкнеться. Одночасно з пускачем KM6 спрацьовує електромагнітний вентиль YA і вода надходить у змішувач.
При заповненні охолодника гранулами спочатку замкнеться контакт датчика нижнього рівня SL1, а потім і верхнього рівня SL2, одержать живлення котушка пускача КМ7 і сигнальна лампа HL «Розвантаження». Пускач КМ7 спрацює і своїми головними замикаючими контактами увімкне в електричну мережу двигун шнека сортувалки, а допоміжним замикаючим контактом через розмикаючий контакт реле часу КТ подасть напругу на котушку пускача КМ8. Пускач КМ8 спрацює і своїми головними контактами ввімкне мотор-редуктор шлюзового затвора пнемоконвеєра, а допоміжним замикаючим контактом подасть живлення на котушку пускача КМ9, який ввімкне двигун вентилятора пневмоконвеєра, що подає гранули в бункер для тимчасового зберігання.
Після закінчення розвантаження гранул з охолоджувальної колонки розімкнуться контакти датчиків верхнього SL2 і нижнього SL1 рівнів, позбавляться живлення котушка пускача КМ7 і сигнальна лампа HL. Пускач КМ7 повернеться у вихідне положення і своїми головними контактами вимкне двигун шнека сортувалки, а допоміжним розмикаючим контактом подасть напругу на котушку реле часу КТ, на якому встановлена видержка часу 90 с. По закінченні видержки часу реле КТ розімкне свій розмикаючий контакт, позбавляться живлення котушки пускачів КМ8 і КМ9 вони вимкнуть мотор-редуктор шлюзового затвора і двигун вентилятора пневмоконвеєра. Розвантаження припиниться. Через деякий час, коли рівень гранул в охолоджувальній колонці знову підвищиться, процес вмикання пускачів KM7, KM8 і КМ9 повториться.
При появі несправності в колі будь-якої частини ОГМ-0,8А завантажувальні машини зупиняються, а розвантажувальні продовжують працювати до повного видалення з них продукту. Аварійна зупинка машин супроводжується звуковим сигналом.
Для роботи в режимі «Налагодження» перемикачі SA1, ..., SA3 ставлять у положення 2. При цьому порушуються блокувальні зв'язки між пускачами, що дає можливість виконувати індивідуальне налагодження окремих частин обладнання.
Вимикання всіх кіл керування електроприводами здійснюється встановленням перемикачів SA1, ..., SA3 в положеннях О.
3.2.2. Автоматизація Брикетування та пресування кормів.
Найбільш сучасне обладнання пресування кормів ОПК-2 продуктивністю 2 т/ч. Воно універсально, тобто дозволяє гранулювати і брикетувати комбікорми і трав'яне борошно, січку трави і кормових сумішей. Розглянемо по рисунку. 3.6 технологічну схему процесу пресування кормів за допомогою устаткування ОПК-2.
Гранулюємий корм горизонтальним шнеком 2 і вертикальним шнеком завантажується в накопичувальний бункер 4, з якого дозатором 3 виводиться в змішувач-живильник 22 преса 20. Одночасно в корм водяться вода в дозатор 3 з бака 1 чи пара в змішувач 22 з паропроводів 21.
Зволожений корм безупинно вводиться в прес 20 і продавлюється в радіальні отвори кільцевої нерухомої матриці, формуючи гранули. Гранули, що видавлюються, обламуються обертовим обламувачем і транспортуються стрічковим транспортером 19 і норією 18 через камеру попереднього сортування 14 в охолоджувальну колону 15. Гранули прохолоджуються повітрям, засмоктуваним вентилятором 11.
 Рисунок. 3.6. Технологічна схема процесу пресування кормів устаткуванням ОПК-2.
Рисунок. 3.6. Технологічна схема процесу пресування кормів устаткуванням ОПК-2.
В міру нагромадження в охолоджувальній колоні 15 гранули вивантажуються вібровивантажувач 17 через камеру остаточного сортування 16 на затарювання.
Крихта і незгранульований корм у камерах 14 і 16 відокремлюються від гранул повітряним потоком, створюваним вентилятором 6, і через циклон 7 повертаються транспортером 5 у бункер 4.
При брикетуванні корму трав'яна січка із сушильного агрегату засмоктується вентилятором 9 через забірник 13 і накопичується в циклоні 10, а потім через шлюзовий затвор подається транспортером 8 у змішувач-живильник 22. У цьому випадку вода вводиться у вивантажувальну горловину транспортера 5. Подальший шлях брикетів — через прес і далі аналогічний шляху гранул. Непресований корм і крихта повертаються через циклон 7 на транспортер 8. Через шлюзовий затвор 12 у трав'яний корм можна додавати солом'яну січку.
При брикетуванні кормових сумішей комбікорм у прес подається транспортером 2, трав'яна січка і солом'яна січка — транспортером 8.
Електрична схема керування ОПК-2 передбачає включення і відключення шістнадцяти асинхронних електроприводів механізмів, їхній захист і сигналізацію про нормальні й аварійні режими (рис. 3.7). Для полегшення пуску двигуна М15 преса, потужність якого складає 90 кВт, передбачене його переключення за схемою з «зірки» на «трикутник». Сумарна потужність інших 15 двигунів не перевищує 50 кВт. Електродвигуни до мережі підключаються автоматами QF1...QF15, ланцюга керування захищені автоматами SF16 і SF17.
Пускає і зупиняє електроприводи оператор за допомогою кнопкових постів SB1., SB20, для екстреного відключення всього устаткування призначена кнопка SB.
Режим роботи вибирають за допомогою перемикача SA2: у положення 1 — «Суміші» працюють всі електродвигуни і брикетують кормові суміші, у положенні 2— «Січка» брикетують трав'яну січку, у положенні 3 — «Борошно» Гранулюють трав'яне борошно чи комбікорм. Цим же перемикачем переводять схему в режим налагодження (на малюнку 5, ланцюги перемикача, використовувані при налагодженні, а також ланцюги сигналізації не показані).
Перемикачем SA1 (рис. 3.7.) установлюють вид зволоження при пресуванні корму: положення 1— «Вода», 2— «Пара». Тумблером S і реле КV2 включають і відключають вторинні ланцюги. Перемикачами SA4 І SA6 встановлюють ручний чи автоматичний режими роботи відповідно вібровивантажувача 17 спресованого корму і вентиля YA3, що подає воду на зволоження корму до 17%.
Рівень вхідної сировини в бункері 4 і готовий корми в охолоджувачі 15 контролюється безконтактними датчиками SL3...SL6 (кінцеві вимикачі типу БВК-24), рівень води в баці для зволоження — електродними датчиками верхнього SL1 і нижнього SL2 рівні. Пуск і зупинку ОПК-2 здійснює оператор у заданій послідовності. Перед пуском включають всі автомати, набирають перемикачами SA заданий режим роботи окремих вузлів, а потім кнопковими постами по черзі включають агрегати. Наприклад, при гранулюванні корму ставлять: SA3—у положення 3—«Борошно», SA1 — у положення 1 — «Вода», SA4 і SA6 — у положення 4 SA5—в положення В, що відповідає транспортуванню крихти транспортером 5 у бункер 4. Включають тумблером S реле KV2, що живить інші ланцюги керування і сигналізації. При цьому відкривається електромагнітний вентиль води YA3. Потім кнопками SB4, SB2, SB14, SB20, SB16, SB8 і SB10 послідовно включають відповідно вертикальний шнек бункера 4, шнек завантаження 2, норію 18 і транспортер брикетів 19, прес 20, дозатор 3, транспортер 8 крихти і вентилятор 6 сортувалки, вентилятор 11 охолоджувача. Електродвигун М15 преса за допомогою реле витримки часу КТ спочатку магнітним пускачем КМ 16 включається за схемою «зірка», а потім магнітним пускачем КМ 17 переключається на схему «трикутник». Блоками-контактами КМ 17:3 включається магнітний пускач КМ14 електропривода обламувача гранул.
Після пуску за допомогою заслінки дозатора 3 і вентилів води вручну встановлюють по амперметрі А номінальне завантаження преса 20.
Якщо з якихось причин рівень сировини в бункері 4 перевищує задане значення, то спрацьовує датчик рівня SL6 і виключає реле KV11, що відключає шнек завантаження 2. При зниженні рівня цей же датчик видає імпульс на повторне включення шнека 2.
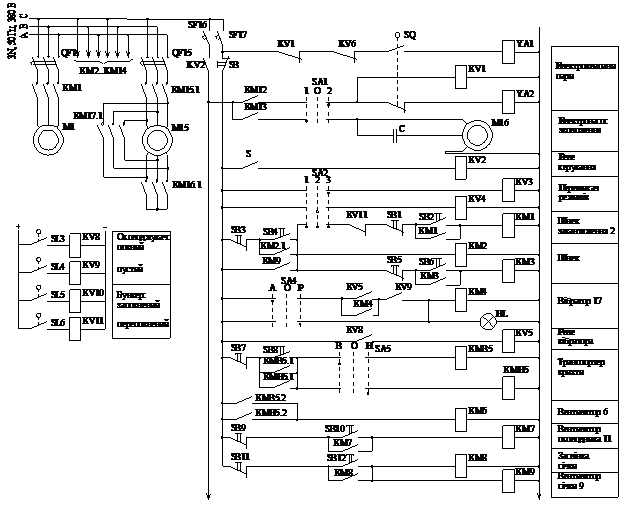
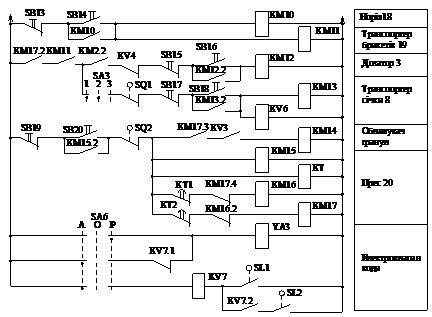
Рисунок. 3.7. Принципова електрична схема керування ОПК-2.
При заповненні гранулами охолоджувача спрацьовують датчики рівня гранул спочатку SL4, а потім SL3. Останній через реле KV8 і KV5 включає привод вібратора вивантажувача 17. Розвантаження гранул вібратором продовжується до зниження рівня гранул при який датчик SL4 через реле KV9 відключають вібратор.
Рівень води в баці підтримується за допомогою електродних датчиків SL1 і SL2, реле KV7 і електромагнітного вентиля YA3.
Відключають обладнання після закриття вручну заслінки дозатора 3 і вентилі зволоження. Кнопками SB9, SB7, SB15, SB1, SB3, SB19, SB13 відключають відповідно вентилятор охолоджувача, транспортер крихти і вентилятор сортувалки, дозатор, шнек завантаження, шнек бункера, прес, норію, дотримуючи такої послідовності.
При брикетуванні трав'яної січки чи кормосуміші згаданими вище перемикачами набирають відповідний режим і кнопками керування включають агрегати в наступному порядку: шнек бункера 4, шнек завантаження 2, норія 18, прес 20, транспортер січки S, затвор і вентилятор 9 січки, затвор соломи 12, транспортер крихти, вентилятор 6 сортувалки і вентилятор 11 охолоджувача. Електродвигун М15 з'єднаний із пресом через запобіжну муфту зі штифтами, що при появі твердих предметів у пресі зрізуються. При цьому спрацьовує кінцевий вимикач SQ2 і відключає електропривод преса. Якщо змішувач-живильник 22 забивається січкою, то від тиску січки спрацьовує кінцевий вимикач SQ1 і відключає транспортер січки 8.
ЗАПИТАННЯ
1. Необхідність гранулювання і брикетування кормів. 2. Що дає використання кормів у пресованому виді? 3. Які бувають За принципом дії брикетний прес або гранулятор в комплекті обладнання для гранулювання і брикетування? 4. Яке обладнання використовується для гранулювання та брикетування кормів? 5. З якого основного обладнання складається ОГМ – 0,8А? 6. З якого основного обладнання складається ОПК-2А?
ТЕСТИ
1. Основними операціями пресування кормів є:
A. Змішування компонентів із воложення;, формування гранул чи брикетів; сушка готового продукту.
B. Змішування компонентів із воложення; пресування кормів.
C. Змішування кормів; гранулювання кормів; вивантаження готового продукту.
2. Для чого призначене обладнання ОГМ – 0,8А?
A. Для приготування брикетів із трав'яного борошна.
B. Для приготування гранул із трав'яного борошна.
C. Для приготування трав’яного борошна.
3. Для чого використовується кінцевий вимикач SQ5 принципової електричної схеми ОГМ – 0,8А?
A. Подає команду на відключення електропривода преса, при відкритих кожухах преса.
B. Подає команду на відключення електропривода преса, при його переповненні.
C. Подає команду на відключення електропривода преса, при його заклинюванні та зрізанні шпонки.
4. Для чого призначенні пристрої SQ3-SQ4 принципової електричної схеми ОГМ –0,8А?
A. Не допускають вмикання двигуна М9 коли не не закритий кожух преса.
B. Керують приводом М10 насоса по рівню води в проміжному резервуарі.
C. Контролюють рівень гранул в охолоджувальній колонці та керують процесом її розвантаження.
5. Яке призначення реле часу КТ принципової електричної схеми ОГМ –0,8А?
A. Для ввімкнення двигуна шнека сортувалки М5 при заповненні охолоджувальної колонки.
B. З затримкою вимикають Шлюзовий затвор і двигун вентилятора пневмоконвеєра, що потрібна для вивантаження залишків гранул з циклона.
C. Забезпечує необхідну послідовнівність ввімкнення електродвигунів обладнання гранулювання.
6. Для чого використовується безконтактні датчики рівня в бункері ОПК-2А?
A. Для керування електродвигуна вібратора при заповнені готовим кормом охолоджувача
B. Для підтримання рівня рівень води.
C. Для підтримання рівня вхідної сировини
7. Для чого використовується безконтактні датчики рівня в охолоджувачі ОПК-2А?
A. Для керування електродвигуна вібратора при заповнені готовим кормом охолоджувача.
B. Для підтримання рівня вхідної сировини
C. Для керування електродвигуна преса при заповнені готовим кормом охолоджувача
8. Для чого використовується реле часу в ОПК-2А?
A. З затримкою вимикають Шлюзовий затвор і двигун вентилятора пневмоконвейєра
B. Для включення електродвигуна преса з «зірки» на «трикутник»
С. Для підтримання рівня вхідної сировини
3.3. АВТОМАТИЗАЦІЯ КОРМОПРИГОТУВАННЯ ТА ЗМІШУВАННЯ КОРМІВ
3.3.1 Автоматизація потокових ліній приготування кормів.
Підготовка кормів до згодовування здебільшого здійснюється за допомогою автоматизованих потокових ліній, комплектів обладнання і агрегатів.
Потокова лінія приготування коренеплодів (рис 3.8. ) Складається із змішувача кормів 1, завантажувального шнека 2, подрібнювача коренеплодів 3 та живильника коренеплодів 4.
У принципіальній електричній схемі керування потоковою лінією приготування коренеплодів (рис. 3.8. ) передбачено місцеве та автоматичне керування.
Для місцевого керування універсальні перемикачі SA1 і SА2 ставлять в положення М. При цьому створюються звичайні кола автоматичного керування електроприводами за допомогою електромагнітних пускачів КМ1, ... , КМ6 Та кнопок SB1, ... , SBl6.
Для здійснення автоматичного керування, при якому початкові керуючі імпульси (команди) створюються реле часу, перемикачі SA1 і SА2 ставлять у положення А. Пуск потокової лінії можливий лише з її кінця. Першим пускається електродвигун M1 привода змішувача кормів. Для його пуску треба натиснути на кнопку «Пуск» SB3. При цьому на котушку електромагнітного пускача КМ1 буде подана напруга, він спрацює і замкне свої головні та допоміжні (блокувальний) замикаючі контакти. Головні контакти ввімкнуть двигун M1 в електромережу, два допоміжні контакти зашунтують кнопки «Пуск» SB3 і SB4, а третій допоміжний контакт підготує до роботи коло котушки електромагнітного пускача КМ2, призначеного для керування електродвигуном М2 привода завантажувального шнека.
Для пуску двигуна М2 треба натиснути на кнопку «Пуск» SB7. При цьому буде подана напруга на котушку пускача КМ2, він спрацює і своїми головними контактами ввімкне двигун М2 в електромережу, а допоміжними контактами зашунтує кнопки SВ7 та SВ8 і замкне коло живлення котушки реле часу KT1. Далі керування електроприводом потокової лінії здійснюватиметься без участі оператора. Одержавши живлення, реле часу КТ1 з видержкою часу, на 20...30 % більшою від часу, потрібного для розгону привода завантажувального шнека, замкне свій замикаючий контакт і подасть напругу на котушку електромагнітного пускача КМ3, призначеного для керування електродвигуном М3 привода подрібнювального апарата подрібнювача коренеплодів. Пускач КМЗ спрацює, своїми головними замикаючими контактами ввімкне в електромережу двигун МЗ, а допоміжними зашунтує кнопку «Пуск» SB10 і подасть напругу на котушку реле часу КТ2.
Реле КТ2 з видержкою часу замкне свій замикаючий контакт у колі котушки електромагнітного пускача КМ4, призначеного для керування електродвигуном привода шнека подрібнювача коренеплодів. Пускач КМ4 спрацює, ввімкне двигун М4, зашунтує кнопку «Пуск» SB12 і подасть напругу на котушку реле часу КТЗ.
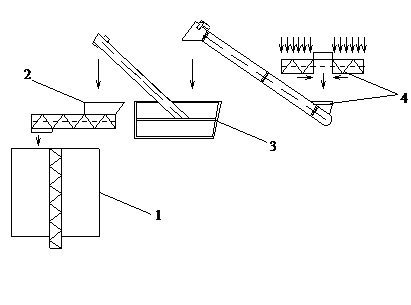
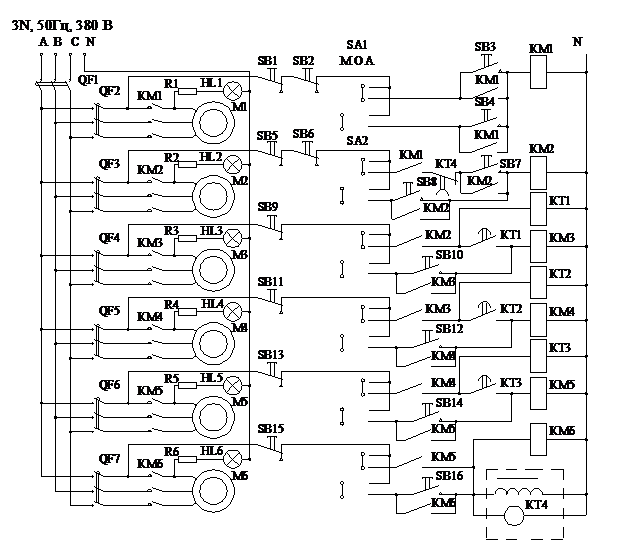 Рисунок 3.8. Потокова лінія приготування коренеплодів.
Рисунок 3.8. Потокова лінія приготування коренеплодів.
Реле КТЗ з видержкою часу замкне свій замикаючий контакт у колі котушки електромагнітного пускача КМ5, призначеного для керування електродвигуном М5 привода похилого конвеєра живильника коренеплодів. При спрацюванні пускача КМ5 вмикається двигун М5, шунтується кнопка «Пуск» SB14 і подається живлення на котушку електромагнітного пускача КМ6, призначеного для керування електродвигуном М6 привода горизонтального конвеєри живильника коренеплодів. Після спрацювання пускача КМ6 вмикається двигун М6, шунтується кнопка «Пуск» SB16 і подається живлення на реле часу КТ4. Технологічна лінія почне працювати.
Реле часу КТ4 типу ВС-10-35 з діапазоном видержок часу від 3 до 90 хв. забезпечує дозоване вивантаження коренеплодів. Воно з заздалегідь заданою видержкою часу, яка відповідає подачі потрібної дози коренеплодів, розмикає свій розмикаючий контакт у колі котушки пускача КМ2, внаслідок чого зупиняються двигуни М2, ..., М6 і подача коренеплодів у змішувач припиняється.
Реле часу КТ1, КТ2 І КТ4 типу РВП-1М забезпечують діапазон видержок часу від 0,4 до 180 с.
Термінова зупинка двигунів здійснюється за допомогою кнопок «Стоп»
Вмикання і вимикання двигунів сигналізується за допомогою сигнальних ламп HL1, ... , HL6.
Захист електромережі та електродвигунів від струмів короткого замикання та перевантаження здійснюється автоматичними вимикачами.
Потокова лінія приготування концентрованих кормів (рис 3.9.) Складається з дробарки Д, елеватора Е, горизонтального конвеєра Т та двох бункерів Б1 і Б2 з заслінками, керування якими здійснюється за допомогою електромагнітів ЕЗБ1 і ЕЗБ2.
Пускають потоку лінію (рис 3.9.) в такій послідовності. Спочатку вмикають автоматичні вимикачі QF1, QF2 і QF3. Потім залежно від того, з якого бункера (першого Б1 чи другого Б2) треба використовувати корм, натискають на кнопку «Пуск» SB2 або SB3. Якщо використовується корм, засипаний в бункер Б1, натискають на кнопку SB2. При цьому подається напруга на котушку проміжного реле KV1 Реле KV1 спрацьовує і своїми замикаючими контактами вмикає в електромережу котушку електромагнітного пускача KM1, шунтує кнопку SB2 і підготовляє до роботи коло котушки електромагніту YA1, а замикаючим контактом запобігає вмиканню реле часу КТ1. Пускач KM1 спрацьовує і своїми головними контактами вмикає електродвигун M1 привода дробарки Д, а допоміжним контактом через розмикаючий контакт реле часу КТ1 подає напругу на реле часу КТ2. Реле КТ2 спрацьовує і послідовно, з певними видержками часу подає напругу на котушки електромагнітних пускачів КМ2 і КМЗ, які вмикають електродвигуни М2 і МЗ приводів елеватора і конвеєра. Одночасно з вмиканням двигуна МЗ одержує живлення електромагніт YA1, який відкриває заслінку бункера Б1. Потокова лінія завантажується і продовжує працювати. При використанні корму, засипаного в бункер Б1 для пуску потокової лінії натискають на кнопку SB3. Вмикання електродвигунів лінії здійснюється аналогічно.
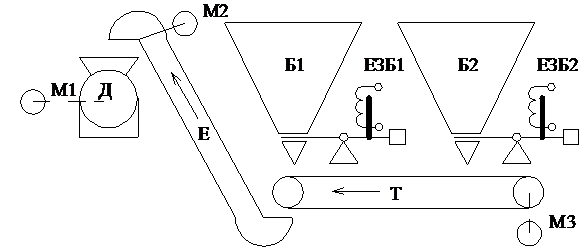
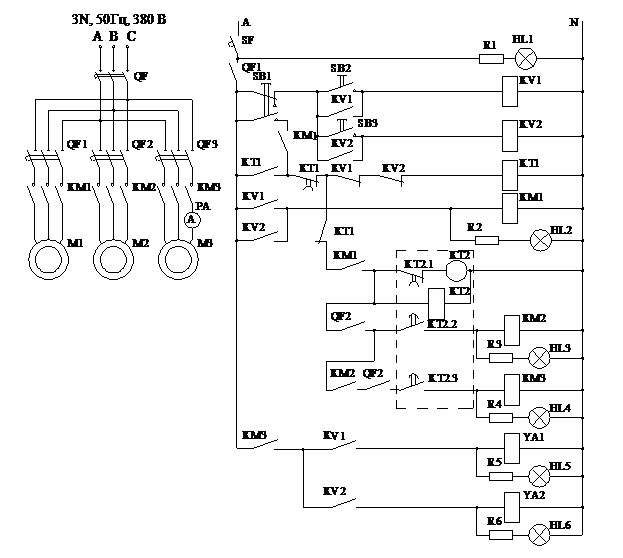 Рисунок 3.9. Потокова лінія приготування концентрованих кормів.
Рисунок 3.9. Потокова лінія приготування концентрованих кормів.
Щоб зупинити потокову лінію, треба натиснути па кнопку SB1 При цьому розімкнеться розмикаючий і замкнеться замикаючий контакти цієї кнопки. Розмиканням розмикаючого контакту позбавиться живлення котушка проміжного реле KV1 або KV2 воно повернеться у вихідне положення і розімкне свої замикаючі і замкне розмикаючі контакти. Розмиканням замикаючих контактів реле KV1 або KV2 підготовиться до вмикання котушка електромагнітного пускача КМ1 і вимкнеться електромагніт YA1 або YA2 заслінки бункера Б1 чи Б2. Внаслідок вимикання електромагніту заслінка закриється і подача корму на потокову лінію припиниться. При замиканні замикаючого контакту кнопки SB1 через замкнений допоміжний замикаючий контакт пускача KM1, розмикаючий із сповільнювачем, що діє при спрацюванні, контакт реле часу КТ1 та розмикаючі контакти реле KV1 і KV2 одержить живлення котушка реле часу KT1 Воно спрацює і без видержки часу розімкне свій розмикаючий контакт у колі живлення реле часу КТ2 і з видержкою часу — в колі котушки пускача KM1 При цьому спочатку без видержки часу вимкнуться двигуни М2 елеватора і МЗ конвеєра, а потім через деякий час, достатній для звільнення машини від продукту,—двигун M1 дробарки. Робота лінії контролюється за допомогою сигнальних ламп.
Від струмів короткого замикання і перевантажень силові кола двигунів захищаються автоматичними вимикачами QF1, QF2 і QF3, а коло керування - вимикачем SF.
3.3.2. Автоматизація дозування кормів.
Дозування окремих видів кормів чи компонентів суміші є важливим чинником підвищення якості кормів і їхньої раціональної витрати.
Дозатори класифікуються по призначенню: для комбікормів і концкормів; коренеплодів; грубих і соковитих стебельчастих кормів; по технологічному принципі: живильники кормів; бункери-дозатори; за принципом дії: об'ємні, вагові, потокові.
Основні різновиди, дозаторів, показані на рисунку 3.10. Робочим органом дозаторів може бути шнек, стрічковий або скребковий конвеєр із бітером, дозуючий барабан, тарілки зі шкребками.
Дозатори сипких та концкормів (рис.3.10 – а, в) призначені для дозованої видачі даних кормів у технологічних лініях кормоцехів. Вони являють собою бункер чи циклон у який через прийомну горловину надходить корм. Їх завантаження контролюється датчиками рівня. У нижній частині бункера у випускному люку встановлюють заслінки. Витрата матеріалу виставляється, як правило, вручну зміною положення заслінки. Дозоване вивантаження кормів їз бункера, циклона може здійснюватися за допомогою шлюзового затвора (рис.3.10 – в).
Бункери-дозатори коренеплодів (рис.3.10 – б) служать для потокового дозування здрібнених коренеплодів перед їх видачею на збірний транспортер лінії збору і змішування. Складається з бункера з верхнім завантаженням корму і дозуючого пристрою. Останній представляє собою нерухому тарілку, на яку самопливом надходять здрібнені коренеплоди.
Над тарілкою на спеціальних водилах обертаються криволінійні скребки, що захоплюють порції продукту і скидають їх у кільцеву щілину між тарілкою і кожухом. Криволінійні скребки одним кінцем закріплені і мають регулювальні гвинти, що дозволяють зрушувати скребки до центра чи тарілки розсовувати їх до периферії. У залежності від цього змінюються порції, захоплювані скребками, а отже і продуктивність дозатора. Регулювання здійснюється вручну. Керують дозатором дистанційно, в автоматичному режимі його пуск і зупинка зблоковані з іншими машинами потокової лінії.
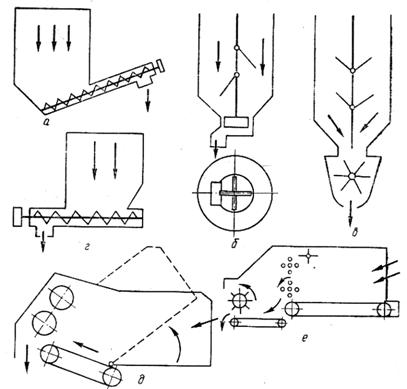
Рисунок 3.10. Технологічні схеми дозаторів кормів: А - сипучих БСК; б - коренеплодів КОРК-15-03.1; в - концкормів ДК-10; г - зелених кормів чи здрібнених коренеплодів ДС-15; д- подрібнених стебельчастих кормів ПДК-Ф-12, ПЗМ-1,5, ПДК-Ф-40, ПДК-Ф-3 (ПС-Ф-3); е - подрібнених стебельчастих кормів БДК-Ф-70-20.
Для прийому із саморозвантажних транспортних засобів, нагромадження і дозованої видачі здрібнених стебельчастих кормів у потокових лініях годівлі, у комплектах кормоцехів, у лініях брикетування і гранулювання кормів застосовують живильники-дозатори, показані на рисунках 3.10 – д, е. Живильник-дозатор складаються з транспортерів, подрібнюючих барабанів, бітерів. Точність дозування живильників-дозаторів забезпечується підтримкою сталої частоти обертання приводних електроприводів.
Приклад функціонально-технологічної схеми дозатора сипких кормів зображено на рисунку 3.11. Згідно з функціонально-технологічною схемою корм з бункера І самотьоком потрапляєна дозуючий пристрій ІІ. При автоматичному керуванні управління виконавчим механізмом дозуючого пристрою ІІ виконується регулятором маси МС по масі продукту на транспортері ІІІ. Маса продукту контролюється датчиком МЕ. Апарати Н передбачають ручне керування виконавчими механізмами дозуючого пристрою та транспортера.
Змішування компонентів є завершальною технологічною операцією готування кормів. Змішувальні пристрої повинні забезпечувати розподіл компонентів, що змішуються, так, щоб показник нерівномірності змішування був у межах зоотехнічних норм.
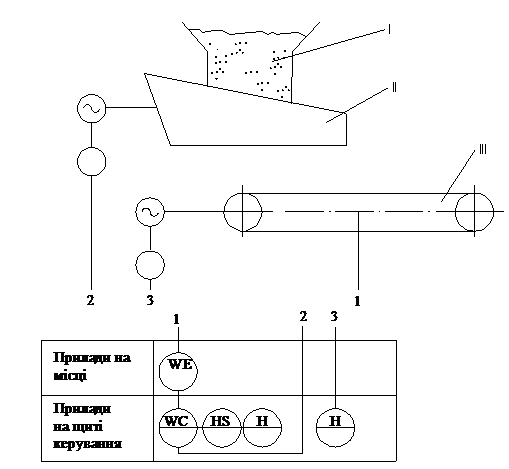
Рисунок 3.11. Функціонально-технологічна схема дозатора сипких матеріалів: І - бункер; ІІ-дозатор; ІІІ-стрічковий транспортер.
За принципом дії змішувачі поділяються на два типи — порціонні і безупинні. У подрібнювачах - змішувачах сполучаються операції змішування і подрібнювання компонентів. Порціонні змішувачі використовують для готування сухих, вологих і рідких кормових сумішей.
Робочі органи порціонних змішувачів встановлені в котлах великої ємності, завдяки чому в них роблять запарювання або стерилізацію суміші чи її окремих компонентів.
У більшості випадків змішувачі кормів входять до складу потокових ліній приготування кормосумішей. При цьому схеми їх автоматизації розробляють з дотриманням вимог до схем керування потоковими лініями. У випадку автономної роботи змішувача схемами керування передбачають нереверсивне або реверсивне керування двигунами, необхідні механічні та електричні блокування й захист від коротких замикань і перевантажень.