Навчальний посібник Автоматизація технологічних процесів і систем автоматичного керування (частина 1)
Страница 4 из 16
1. Які ціль і задача системи автоматичного керування?
2. Які блоки складають об'єкт керування?
3. Які функціональні і керуючі зв'язки маються між блоками, що визначають майбутню систему?
4. Які режими об'єкта керування і його блоків і скільки технологічно припустимих переходів між цими режимами?
5. Якими конкретними алгоритмами описується той чи інший режим?
6. Які датчики і виконавчі елементи можуть бути застосовані для даної системи?
7. Які математичні рівняння описують взаємодію керуючих сигналів і сигналів збурення, що характеризують той чи інший режим роботи систем?
Після аналізу технологічних процесів чи окремих операцій необхідно установити весь обсяг інформаційних параметрів, що характеризують технологію і всі їх взаємозв'язки.
Накопичена відповідно до поставлених питань інформація повинна бути відбита в компактній і зручній для подальшої роботи формі. Саме це дає можливість виявити перелік інформаційних параметрів.
Класифікація інформаційних параметрів і технологічний ланцюжок дозволяють скласти структурну схему системи керування, що представляє собою сукупність об'єкта керування і керуючого пристрою.
Варто мати на увазі, що неповна і неточна обробка всієї інформації приводить до її перекручування на наступних рівнях, до запізнювання в прийнятті рішень і заходів для узгодження дій установок, потокових ліній, цехів і в підсумку до збільшення витрат на виробництво, зниження рентабельності, псування продукції тощо.
1.2.7. Технологічні установки як об'єкти автоматизації
Об'єкт автоматизації (ОА) – це реальна технологічна установка, функціонування якої характеризується деякими показниками якості – технологічними параметрами, що є вихідними координатами, а також штучно створюваними вхідними впливами, які прямо чи побічно впливають на стан параметрів.
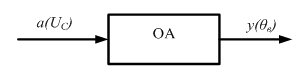
Найпростіші об'єкти автоматизації мають одну вихідну величину і відповідно один вхідний вплив. Наприклад, у водонагрівача-термоса вихідною величиною (параметром) є температура води, а регулюючим впливом — електрична напруга, подавана на електронагрівників (рис.1.2).
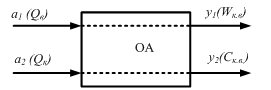
До простих можна віднести також технологічні установки з декількома вхідними і вихідними координатами, якщо між цими координатами не існує функціональних взаємозвязків. Такий об'єкт можна розглядати як декілька найпростіших за відповідними параметрами і каналами вхідних впливів. Наприклад, у свинарниках при змішуванні комбікорму з водою й іншими добавками цілком допустимо процеси заповнення змішувача водою, комбікормом тощо розглядати роздільно (рис.1.3).
|
Рис. 1.3. Структура кормозмішувача у свинарнику як об'єкта керування завантаженням: α1, і α2 – вхідні впливи – подача води Qв і комбікорму Qк у змішувач; y1 і y2 – вихідні величини – вологовміст Wк. в. та концентрація корму Ск. в. кормосуміші
|
|
|
Рис. 1.2. Структура водонагрівача-термоса як об'єкта регулювання температури води:
А – вхідна координата – електрична напруга; у – вихідна координата – температура води
|
|
І нарешті, складні об'єкти з декількома взаємозалежними структурами вхідних і вихідних координат вимагають обліку взаємного впливу суміжних впливів і параметрів. Наприклад, при регулюванні мікроклімату вентиляція впливає не тільки на концентрацію газів СО2, NH3, Н2S у приміщенні, але і на температуру і вологість, у свою чергу, випаровування підвищує вологість і знижує температуру (рис. 1.4).
При невеликій кількості взаємозалежних координат звичайно вдається установити головні для даного процесу параметри, яким варто віддати перевагу в процесі регулювання, тоді інші можна розглядати як другорядні (залежні).
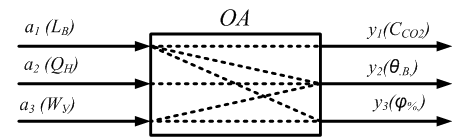
Рисунок. 1.4. Структура пташника як об'єкта регулювання мікроклімату: α1, α2,, а3 – вхідні координати – вентиляція LВ, обігрів QН, зволоження WУ;; y1 , y2, y3 – вихідні координати – концентрація вуглекислого газу ССО2, температура θВ і вологість φ%. повітря
Однак у сучасному сільськогосподарському виробництві багато технологічних об'єктів, набагато більш складних за структурою взаємозв'язків. Наприклад, пташник із птахами являє собою об'єкт із безліччю вихідних координат (якими є параметри мікроклімату, годівлі і освітлення, збирання посліду і збору яєць, поїння і санітарного стану) і цілим поруч керованих впливів по обслуговуванню поголів'я птахів, тобто вхідними координатами. Між цими координатами існують визначені зв'язки і взаємозалежності.
Усі розглянуті об'єкти автоматизації мають складну внутрішню структуру і можуть бути представлені рядом елементарних функціональних ланок, певним чином з'єднаних між собою. У найпростішому випадку в структурі об'єкта автоматизації можна виділити об'єкт керування ОУ — технологічний процес, розглянутий изольованно, і регулюючий орган РО — пристрій, що забезпечує цілеспрямований вплив на об'єкт керування (рис. 1.5).

Рис. 1.5. Структура найпростішого об'єкта автоматизації
Об'єкти керування (рис. 1.6) характеризуються трьома узагальненими координатами. Перша координата – вихідна величина y, чи параметр процесу, що характеризує наявність в об'єкті речовини, або його енергетичний потенціал. Друга координата – збурення ХЗ, що представляє собою сумарний (результуючий) потік речовини чи енергії, обумовлений ходом процесу (навантаження ) і впливом середовища (перешкоди ).
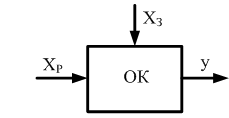
Рис.1.6. Структура простого об’єкта керування
І нарешті, третя координата – регулюючий вхідний вплив ХР – величина штучно утвореного впливу, покликаного компенсувати дія збурення і забезпечити нормальне функціонування процесу. Щоб об'єкт знаходився в рівновазі, повинне бути дотримана умова ХР = ХЗ чи ХР - ХЗ =0. Наявність Δх= ХР - ХЗ дозволяє повертати об'єкт до оптимального значення параметра після його природного відхилення.
Регулюючий вхідний вплив на об'єкт ХР одночасно є вихідною координатою регулюючого органа РО, входом якого служить вплив, що прикладається до нього при ручному керуванні, – відкриття заслінок чи засувок, подача електричної напруги на електроприводи, електротеплові чи освітлювальні установки, ввімкнення швидкостей, муфт, трансмісій тощо.
Наявність регулюючого органа – неодмінна умова і вимога керованості технологічного об'єкта. Як приклад можна розглянути камеру інкубатора як об'єкт регулювання вологості повітря. Об'єкт керування в ній – повітряне середовище всередині камери, регулювальний орган – клапан подачі води на зволожувач, параметр – відносна вологість повітря, збурення – викид вологи з вентиляційним повітрям, що регулює ручний вплив– подача напруги на соленоїд електроклапана.
Взаємозв'язок між узагальненими координатами об'єктів керування виражається статичними і динамічними характеристиками. Статична характеристика об'єктів керування являє собою залежність між вихідною координатою (параметром процесу) і результуючим значенням вхідної координати – впливом при сталих режимах, тобто функцію.
1.2.8. Вихідна інформація Про технологічні процеси Як об'єкти керування
При розв’язку задач автоматизації керування технологічними процесами потрібно мати вихідну інформацію, що характеризує наступне:
А) дані про ємності об'єктів автоматизації і зв'язках між ними;
Б) вимоги до показників якості (параметрів) технологічних процесів;
В) значення, інтенсивність зміни в часі і місце прикладання збурювання;
Г) значення регулюючого впливу і передатні властивості регулювальних органів.
Кожна ділянка, де може накопичуватися речовина чи енергія в об'єкті (ємність), повинний бути охарактеризований окремо і повинні бути представлені дані про з'єднання між всіма ємностями: опору потоків, характеристика пружних елементів тощо.
Для вирішення завдань автоматизації важливі всебічні відомості про збурення. Насамперед це кількісна характеристика всіх потоків речовини чи енергії розглянутого об'єкта керування, що беруть участь у технологічному процесі (навантаження), так і викликані зовнішніми факторами (перешкоди). Ці зведення можуть бути представлені максимальними, мінімальними чи усередненими значеннями самих потоків чи залежностями, що їх характеризують, а також імовірністю сполучення різних факторів.
Наприклад, тепловий потік від тварин може бути визначений у розрахунку на одиницю маси тварин, а потік теплоти через огородження – за допомогою розрахункового значення температури зовнішнього середовища.
В одноємнісних об'єктах збурювання можуть бути прикладені на стороні подачі чи витрати, у багатоємнісних — до різних ємностей, а в об'єктах з розосередженими параметрами – до певних ділянок.
Відомості про регулювальні органи, через які здійснюється регулюючий вплив на об'єкт керування, беруть з паспортних даних пристроїв, що здійснюють ці впливи.
ЗАПИТАННЯ
1. Що являє собою технологічний об'єкт автоматизації? 2. Що поєднує технологія виробництва? 3. Що являється основою для постійного розвитку й удосконалювання технології виробництва? 4. Що являється основою для постійного розвитку й удосконалювання технології виробництва? 5. Що вимагає задача розробки нових технологічних процесів і типізації їх? 6. Що дозволяє виявити технологічний ланцюжок процесу? 7. Яку інформацію Потрібно мати при рішенні задач автоматизації керування?
ТЕСТИ
1. Технологічна операція – це...
A. Одиничний вплив, що приводить до зміни форми, структури, складу або стану предмета виробництва.
B. Вплив, що викликає зміну просторового положення предмета виробництва.
C. Сполучення технологічного устаткування і реалізованих на ньому технологічних процесів.
2. Технологічний об'єкт автоматизації — це...
A. Вплив, що викликає зміну просторового положення предмета виробництва.
B. Сполучення технологічного устаткування (машин, механізмів) і реалізованих на ньому технологічних процесів і операцій.
C. Одиничний вплив, що приводить до зміни форми, структури, складу або стану предмета виробництва.
3. Скільки величин (параметрів) мають найпростіші об'єкти автоматизації?
A. Одну вихідну величину і відповідно один вхідний вплив.
B. Одну вихідну величину.
C. Кілька взаємозалежних вхідних і вихідних координат.
4. Скільки величин мають складні об'єкти автоматизації?
A. Одну вихідну величину і відповідно один вхідний вплив
B. Кілька взаємозалежних вхідних і вихідних координат
C. Кілька взаємозалежних вхідних і вихідних координат, які вимагають обліку взаємного впливу, суміжних впливів і параметрів
5. Якими узагальненими координатами характеризуються об'єкти керування?
A. Перша координата — вихідна величина, друга — збурювання.
B. Перша координата — вихідна величина, друга — збурювання, третя — регулюючий вхідний вплив.
C. Перша координата — вихідна величина, друга — регулюючий вхідний вплив.
6. При дотриманні якої умови об'єкт будезнаходитися в рівновазі?
A. Регулюючий вхідний вплив відповідає величині збурювання.
B. Регулюючий вхідний вплив відповідає вихідній величині.
C. Вихідна величина відповідає величині збурення.
7 Що являє статична характеристика об'єктів керування?
A. Залежність між вихідною координатою і вхідної координати.
B. Залежність між вихідною координатою і величиною збурювання.
C. Залежність між вихідною координатою і результуючим значенням вхідної координати — впливом при сталих режимах.
1.3. СХЕМИ СИСТЕМ АВТОМАТИЗАЦІЇ
1.3.1. Класифікація схем автоматизації
При розробці схем автоматичного управління і технологічного контролю застосовують різні прилади і засоби автоматизації, що сполучаються з об'єктом управління і між собою по певних схемах. Залежно від використовуваних приладів і засобів автоматизації (електричних, пневматичних, гідравлічних) і лінійного зв'язку в проектах автоматизації розробляють схеми, які розрізняють по видах і типах.
По видах схеми підрозділяють на Електричні, пневматичні, гідравлічні і комбіновані.
Найбільшого поширення в практиці автоматизації технологічних процесів набули електричні прилади і засоби автоматизації, що пояснюється великою різноманітністю наявної апаратури і приладів і наявністю на об'єктах джерел електроживлення необхідної потужності і напруги. У зв'язку з цим найбільшого поширення набули електричні схеми. У спеціальних умовах, наприклад в умовах вибухонебезпечних виробництв, в переважній більшості випадків застосовують пневматичні прилади і засоби автоматизації. Це зумовило необхідність виконання великого числа різних пневматичних схем. Через громіздкість гідравлічної апаратури і труднощів передачі гідравлічних командних імпульсів на великі відстані гідравлічні схеми набули невеликого поширення.
У ряді випадків в проектах зустрічаються комбіновані електропневматичні, електропневмогідравлічні, пневмогідравлічні і електрогідравлічні схеми.
По типах схеми автоматизації підрозділяють на:
Структурні, Функціональні, Принципові, Монтажні, З'єднань.
Схеми автоматизації, як правило, виконують без дотримання масштабу. У монтажних схемах дотримується дійсне просторове розташування окремих засобів автоматизації і монтажних виробів.
Схеми автоматизації, як правило, виконують без дотримання масштабу. У монтажних схемах дотримується дійсне просторове розташування окремих засобів автоматизації і монтажних виробів.
1.3.2. Класифікація електричних схем
У проектах автоматизації сільськогосподарського виробництва використовують такі електричні схеми: структурні, функціональні, принципові, з’єднань, підключень та ін.
Визначення типу та сфери застосування схем автоматизації показано в таблиці 1.1.
В конструкторській документації схеми автоматизації кодуються буквами і цифрами в залежності від виду і типу схеми. Коди видів і типів схем автоматизації показано в таблиці 1.2.
Схеми автоматизації мають загальні терміни і поняття щодо схем (Додаток до ГОСТ 2.701-76).
Елемент схеми – складова частина схеми, яка виконує певну функцію у виробі і не може бути розділена на частини, які мають самостійне функціональне призначення (резистор, трансформатор, насос-розподільник, муфта та ін.).
Пристрій – сукупність елементів, що являє собою єдину конструкцію (блок, шафа, механізм). Пристрій може не мати у виробі певного функціонального призначення.
Функціональна група – сукупність елементів, що виконують у виробі певну функцію і не об'єднані в єдину конструкцію.
Функціональна частина – елемент, пристрій, функціональна група.
Функціональне коло – лінія, канал, тракт певного значення (канал звуку, тракт ПВЧ та ін. )
Лінія взаємозв'язку – відрізок лінії, що вказує на наявність зв’язку між функціональними частинами виробу.
Установка – умовне найменування об’єкта в енергетичних спорудах, на який випускається схема, наприклад головні (силові) кола.
Таблиця 1.1
Характеристики типів схем
|
Тип схеми
|
Визначення типу
|
Сфера застосування
|
|
1. Структурна схема
|
Визначає основні функціональні частини виробу, їх призначення і взаємозв'язок
|
Розробляються при проектуванні виробів (установок) на стадіях, що є попередніми відносно розробки схем інших типів, використовуються для загального ознайомлення з виробом (установкою)
|
|
2. Функціональна схема
|
Визначає основні процеси, що протікають в окремих функціональних колах виробу (установки) чи у виробі (установці) в цілому
|
Використовуються для вивчення принципів роботи виробів (установок), а також при їх налагодженні, контролі і ремонті
|
|
3. Принципова (повна) схема
|
Визначає повний склад елементів і зв'язків між ними, і, як правило, дає детальне уявлення про принципи роботи виробу (установки)
|
Служать основою для розробки конструкторської документації, наприклад схем з'єднань (монтажних). Використовуються для вивчення принципів роботи виробів (установок), а також при їх налагодженні, контролі і ремонті
|
|
4. Схема з'єднань (монтажна)
|
Показує з'єднання складових частин виробу (установки) і визначає проводи, джгути, кабелі, якими здійснюються ці з'єднання, а також місця їх приєднання і вводу
|
Використовуються при розробці конструкторської документації, і насамперед креслень, які визначають прокладання і способи кріплення проводів, джгутів, кабелів у виробі (установці), а також для здійснення приєднань і при контролі, експлуатації і ремонті виробів (установок).
|
|
5. Схема підключення
|
Показує зовнішні електричні зв'язки між вимірювальними пристроями і засобами отримання первинної інформації, з одного боку, щитами і пультами автоматизації — з іншого
|
Використовується при розробці конструкторської документації, а також для здійснення підключень виробів і при їх експлуатації.
|
|
6. Загальна схема
|
Визначає складові частини комплексу і з'єднання їх між собою на місці експлуатації
|
Використовується при ознайомленні з комплексами, а також при їх контролі і експлуатації. За необхідності загальна схема може розроблятися на збиральну одиницю.
|
|
7. Схема розташування
|
Визначає відносне розташування складових частин виробу (установки), а за необхідності, також проводів, двигунів, кабелів, трубопроводів тощо.
|
Використовується при розробці конструкторської документації, а також при експлуатації і ремонті виробів (установок)
|
Таблиця 1.2 Коди видів і типів схем автоматизації
|
Вид схеми
|
Шифр
|
Тип схеми
|
Шифр
|
|
Електрична
|
Е
|
1. Структурна
|
1
|
|
Гідравлічна
|
Г
|
2. Функціональна
|
2
|
|
Пневматична
|
П
|
3. Принципова (повна)
|
3
|
|
Кінематична
|
К
|
4. З'єднань (монтажна)
|
4
|
|
Оптична
|
Л
|
5. Підключення
|
5
|
|
Вакуумна
|
В
|
6. Загальна
|
6
|
|
Газова
|
Х
|
7. Розташування
|
7
|
|
Автоматизації
|
А
|
8. Інші
|
8
|
|
Комбінована
|
С
|
9. Об'єднана
|
9
|
ЗАПИТАННЯ
1. Що показує схема з'єднань (монтажна)? 2. Що визначає структурна схема? 3. Що показує схема підключення?
ТЕСТИ
1. Що визначає функціональна схема?
A. Основні процеси, що протікають в окремих функціональних колах виробу (установки) чи у виробі (установці) в цілому.
B. Основні функціональні частини виробу, їх призначення і взаємозв'язку.
C. Складові частини комплексу і з'єднання їх між собою на місці експлуатації.
2. Що визначає принципова схема?
A. Показує з'єднання складових частин виробу (установки) і визначає проводи, джгути, кабелі або трубопроводи.
B. Повний склад елементів і зв'язків між ними, і, як правило, дає детальне уявлення про принципи роботи виробу (установки).
C. Повний склад елементів і зв'язків між ними.
3. Елемент схеми — це...
A. Складова частина схеми, яка виконує певну функцію у виробі і не може бути розділена на частини, які мають самостійне функціональне призначення.
B. Складова частина схеми, яка виконує певну функцію.
C. Складова частина схеми, яка має самостійне функціональне призначення.
4. Пристрій — це...
A. Сукупність елементів, що виконують у виробі Певну функцію.
B. Сукупність елементів, що являє собою єдину конструкцію (блок, шафа, механізм) і може не мати у виробі певного функціонального призначення.
C. Сукупність елементів, що не можуть мати у виробі певного функціонального призначення.
5. Функціональна група – це...
A. Сукупність елементів, що виконують у виробі Певну функцію і не об'єднані в єдину конструкцію.
B. Сукупність елементів, що виконують у виробі Певну функцію.
C. Сукупність елементів, що Не об'єднані в єдину конструкцію.
6. Лінія взаємозв'язку – це...
A. Відрізок лінії, що вказує зв’язок.
B. Відрізок лінії, що вказує функціональні частини виробу.
C. Відрізок лінії, що вказує на наявність зв’язку між функціональними частинами виробу.